



Thanks for the suggestions 
Hello,
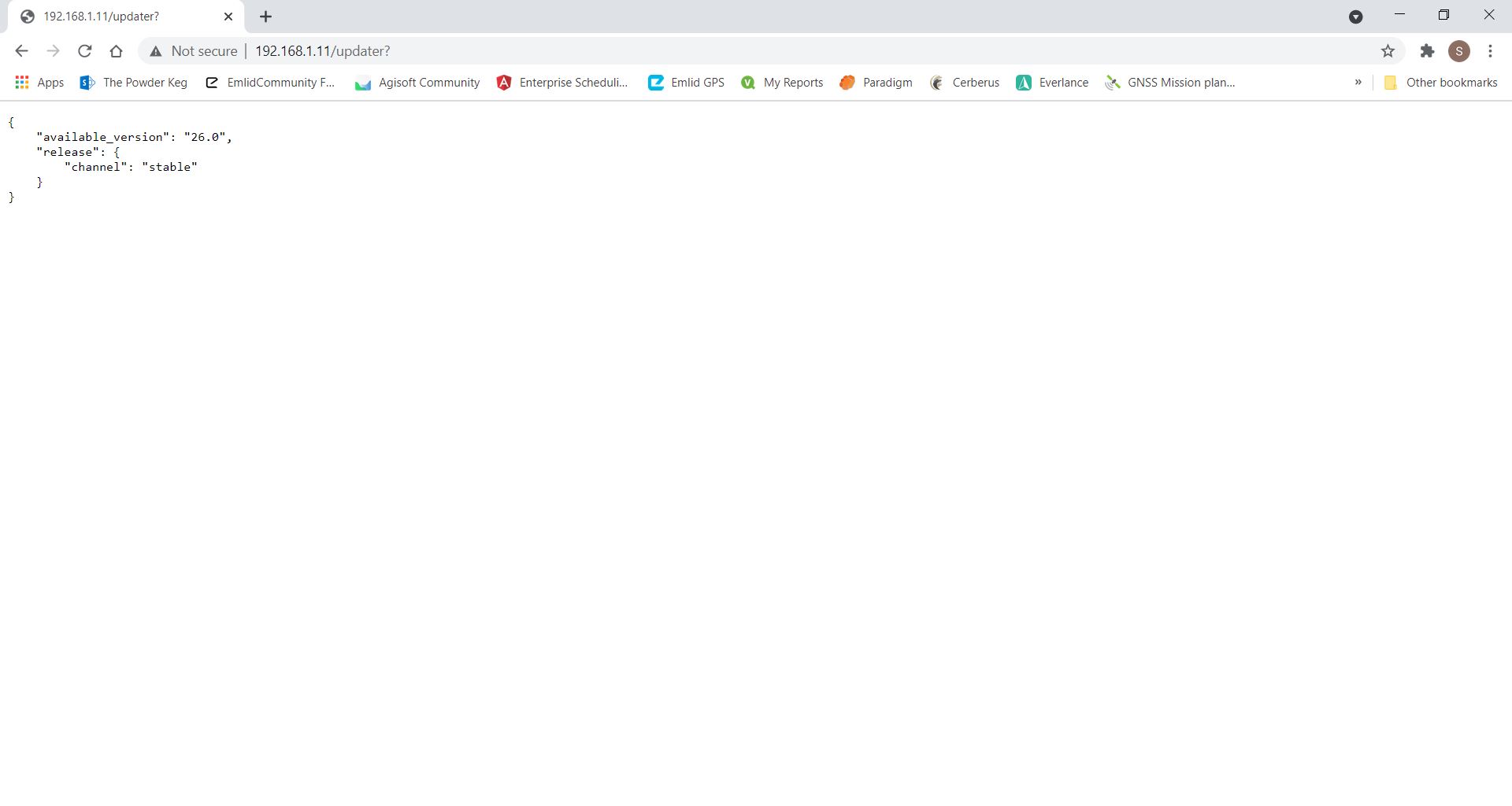
I am having issues updating from 2.24.0 to v26. When I click on Update RechView, I get the following screen. I am using a web browser from my laptop. Any suggestions to try to update?
**Update I have tried using the phone app and I am still getting the same page as the browser.

me sucede lo mismo.
Hi @steve.m!
Unfortunately, there is an issue with the firmware version 2.24.0. You can access the Updater page via the <reach_ip>:5000 address. In your case, it should be available at 192.168.1.11:5000.
3 Likes
Hi @PotatoFarmer,
We’ll note this request and think about how to make it easier. Thank you!
3 Likes
Hi Aminu,
it should be possible to update the device just from ReachView 3 Settings tab:
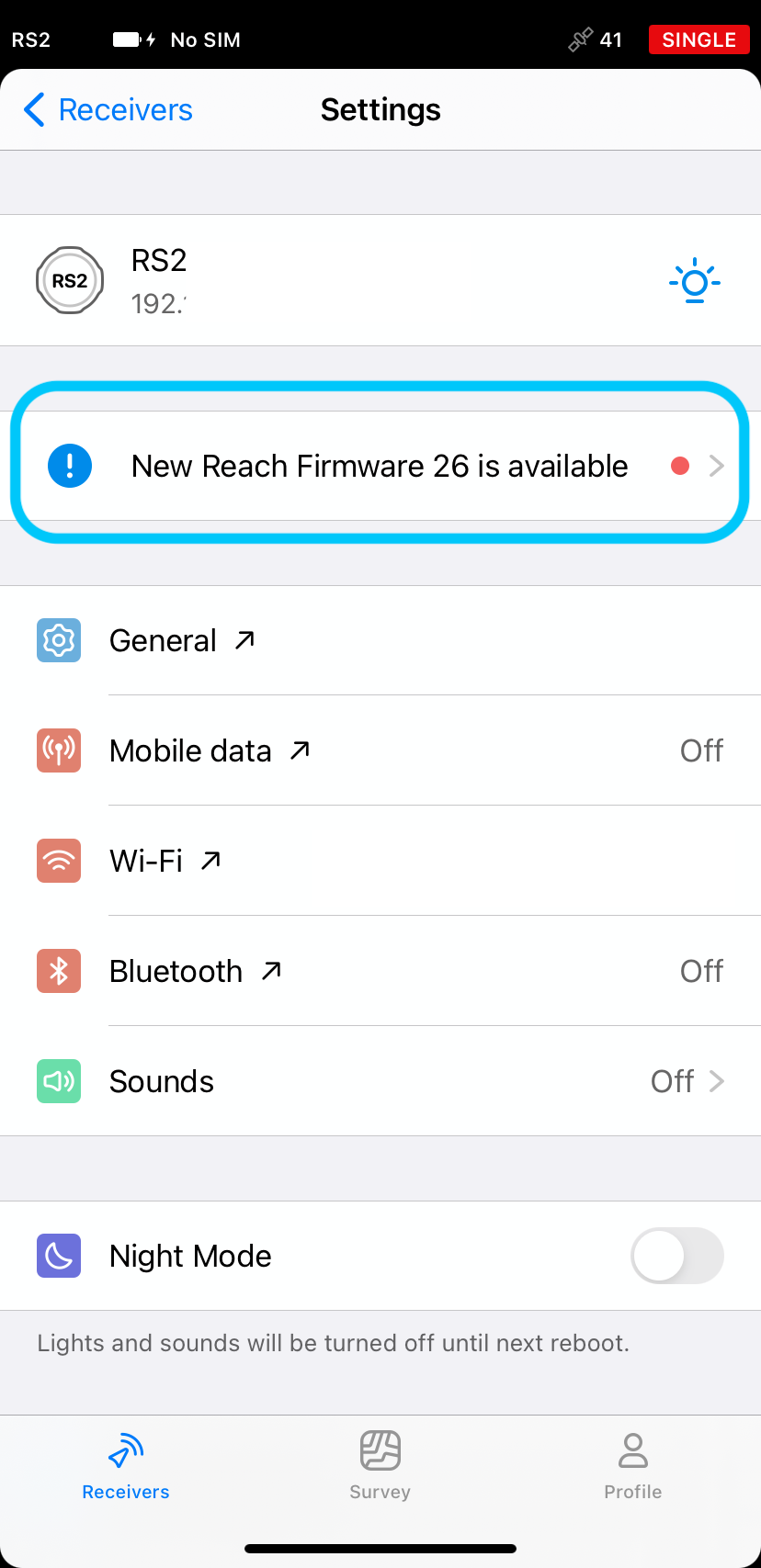
Could you please check that?
1 Like
Refresh my memory. Where is the link to the new frimware ?
Click the gear icon, then click check for update.
Sometimes you have to check more than once. But others its ready to update.
All three RS2s on 26 now, first time away from the Dev builds for a while! We have six aerial surveys to do this week, P4RTK, RS2 as PPK base and two RS2 rovers for the GCPs. Since updating they all connect to Wi-Fi straight away, and seem to be charging better, we have one unit that always flashed the fifth LED but never made it to 100%, it’s charging great now! Thanks Emlid 
3 Likes
I have a question about logging in RV3, I understood that when you enter the antenna height it adds the 0.134m to the antenna phase centre, however according to the RINEX header it has only put 2m for the antenna height:
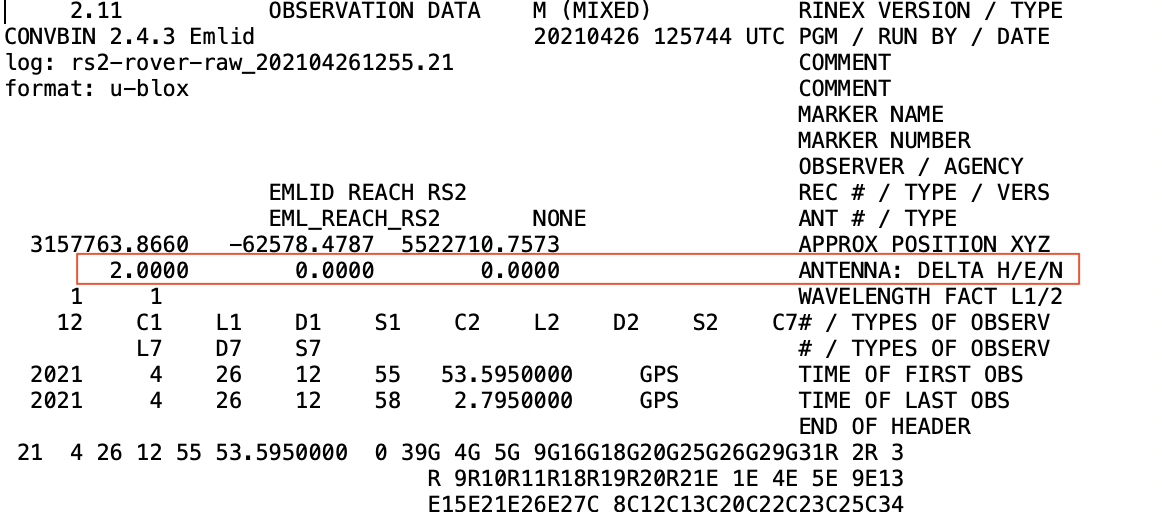
We have 12 observations from yesterday to process, I’ll just remove the 2m in the header and put a manual height in RTKPost which is the way we’ve always done it.
Hey, this depends on your workflow. For logging and PP in RTKPost, RV3 now adds the antenna information into the RINEX header. Note you can see where it lists the antenna as EML_REACH_RS2. If you are using antenna calibration information (igs14.atx downloadable from the igs website) and loaded into RTKPost through the options/files menu, then don’t add 0.134m to your height as RTKPost will do it automatically from the antenna calibration file. If you’re not using the calibration file, then you can add the 0.134m.
A note on loading the calibration file into RTKPOST. I’ve found you have to select the calibration file in the options/files section and then close the options. You then need re-open the options so that you can see the antenna selections in the options/positions menu. As a final note I recommend using ‘*’ for auto, which means RTKPost will load the antenna and the height value from the RINEX header. If you select EML_REACH_RS2 from the drop down menu you also need to manually enter the height on the right as it won’t load it automatically from the RINEX header. Finally to double check everything is as expected, make sure on the options/output page the output header and process options are turned on. That way you can see in the PP pos file that the correct antenna was applied and the correct height values read from the RINEX header.
1 Like
A post was split to a new topic: Reach stops sending valid data
Hello everyone,
We’ve just released the Reach Firmware 26.1!
Here is the list of changes:
Improvements
- CSV projects from Reach Panel are exported as CSV files, not ZIP archives to be easily imported in ReachView 3
- Improved work in base mode with third-party receivers with a 5/10 Hz RTK rate
Fixes
- RTK status LED behavior on Reach RS2 when being in Base Mode
- Quiet sound notifications on Reach RS2
- Applying all RTCM3 MSM4 messages on Reach RS2 using LoRa
- Some cases when the receiver gets stuck in Time Sync mode
- Some cases of Reach M+/RS+/M2 overheating
17 Likes
Stable or dev ?
A post was split to a new topic: Wi-Fi connection issues
Hello!
This is a stable release.
Starting with the Reach Firmware 26 Beta 1, our releases, previously known as ‘dev’ are called ‘Beta’. It means if there is the ‘Beta’ keyword in version (e.g. 26 Beta 1, 26 Beta 2) - this is actually the same as ‘dev’ previously. If not (e.g. Reach Firmware 26, 26.1, 26.2, …) - this is a stable release.
8 Likes
So the previous odds and evens system is no more?
Hi @DirtyHarry,
You’re right!
Hello everyone,
We’ve just released the Reach Firmware 26.2 that contains some important fixes:
Fixes
- Make RINEX 2.XX logs on single-band receivers contain only selected GNSS
- Fix deleting Wi-Fi networks with the names that contain special symbols
- Fix some cases when Reach M+/M2 turns into sync while running
- Make logs not disappear in case a Reach M+/M2 gets turned off by disconnecting from the power supply
- Fix wrong LoRa settings representation in Reach Panel if they were applied via ReachView 3
- Fix the ability to set wrong air data rates on the Base Mode tab in Reach Panel
- Fix sudden one-hour interruptions in long-time LoRa transmission on Reach RS2
- Automatically restart the UBX log if the
Raw data debugis enabled
9 Likes
Hello everyone!
We’ve just released the Reach Firmware 26.3. Here is the list of changes:
Improvements
- Add LoRa constraints for Israel
- Improve reconnection to Wi-Fi network in case of connection loss
Fixes
- Fix broken RTCM3 settings on Reach Module
- Do not allow to set NMEA update rates if RTK update rate is not divisible on it
- Fix some issues with overheating
9 Likes