



Let’s say you carried out a survey, compared the results, and realized that you have a coordinates mismatch. Today, we share with you possible reasons and how you can resolve this issue.
-
Solution status
The first possible reason for inaccurate results is that you have collected points with the FLOAT or even SINGLE solution. In such cases, the accuracy is usually meter-level.
How to fix: Collect the point with FIX solution status.
-
Antenna height
To obtain the coordinates of the point on the ground, it’s important to set the correct antenna height for the receiver. Check the value you have set. You can learn more about this in our previous posts on antenna height setup for RTK and PPK.
How to fix: If you have entered the wrong value, you can recalculate the heights of your points manually.
-
Base placement
When you do a survey, you always need to keep in mind whether you need absolute or relative accuracy.
-
Relative accuracy
The relative accuracy and the Average SINGLE coordinates entry method used for this provide only meter-level results. However, if you have a FIX on the rover, the position of the points relative to the base and each other is precise to centimeters. To get consistent results in this case, be sure to set up the base in the same location and use the same coordinates for it in successive surveys.
How to fix: If you have carried out the measurements with different Average SINGLE positions of the base and have the points measured in both surveys, you could superimpose the data.
-
Absolute accuracy
To obtain centimeter-accurate coordinates in a particular coordinate system, you need to place the base over a known point or use an Average FIX entry method.
How to fix: If you have carried out the survey with the base placed using Average SINGLE, but you have precise coordinates of it (for example, after uploading the log to the PPP service), you can shift the survey results following the steps from this tip.
- Coordinate system
-
Horizontal datum
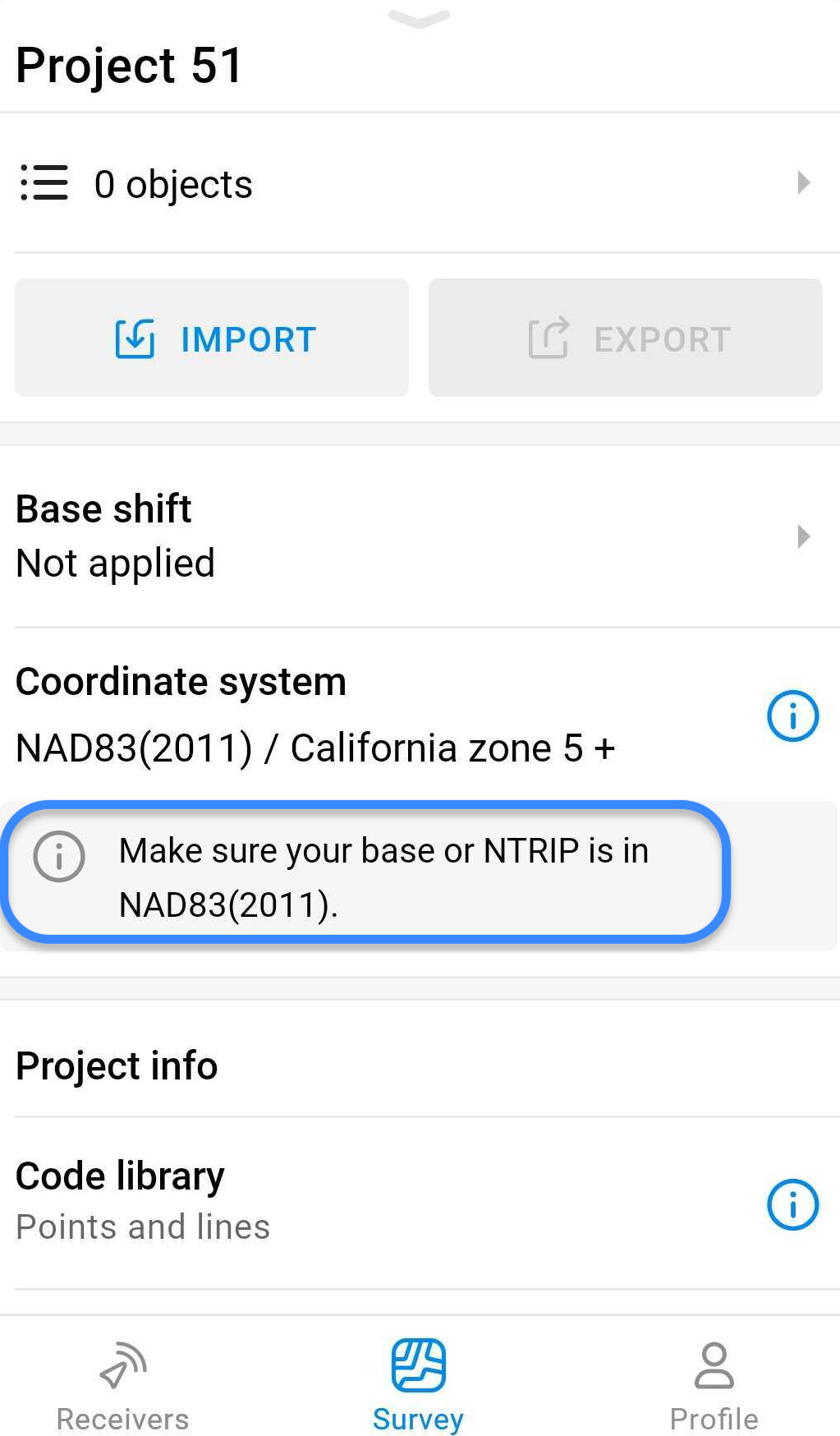
Another reason for a coordinates mismatch is a difference between the required and used horizontal datums. The geographic coordinates you have in Emlid Flow are in the datum of the base position. So make sure that your own or the NTRIP service’s base send position in the datum specified in your Emlid Flow project. This way, the projection can be applied properly:
How to fix: If this is not the datum you need, you can convert the geographic coordinates from Emlid Flow to the required datum in 3rd-party software. After that, you can also apply a projection to them if necessary.
-
Projection
If you work with the projected coordinates, check that the coordinates you’re comparing are in the same projection.
How to fix: If not, you can follow these steps to convert the data:
- Export your project in CSV format from Emlid Flow.
- Manually remove the data from the columns Easting, Northing, Elevation, Base Easting, Base Northing, and Base Elevation. You can do that in Google Sheets or any text editor.
- Create a project with the correct projection.
- Upload the CSV to it. Emlid Flow will automatically recalculate the data.
-
Height (vertical datum)
The main issue with heights is usually attributed to the use of ellipsoidal and orthometric heights. First, verify which type of height you need for your project. For orthometric heights, check that you have specified the geoid model when creating a survey project.
How to fix: If you didn’t use a geoid model or used the wrong one, you can follow the same steps as for the wrong projection.
That’s it! We hope these tips will help you out! If you have any questions or need further help, do not hesitate to contact us at support@emlid.com.
P.S. Our last post was about creating an orthomosaic for Emlid Flow.