Let’s move to the field today. When you’re setting up your receivers for RTK, among other things, you need to set the antenna height: on the Survey tab on the rover and the Base settings on the base. How to do that right?
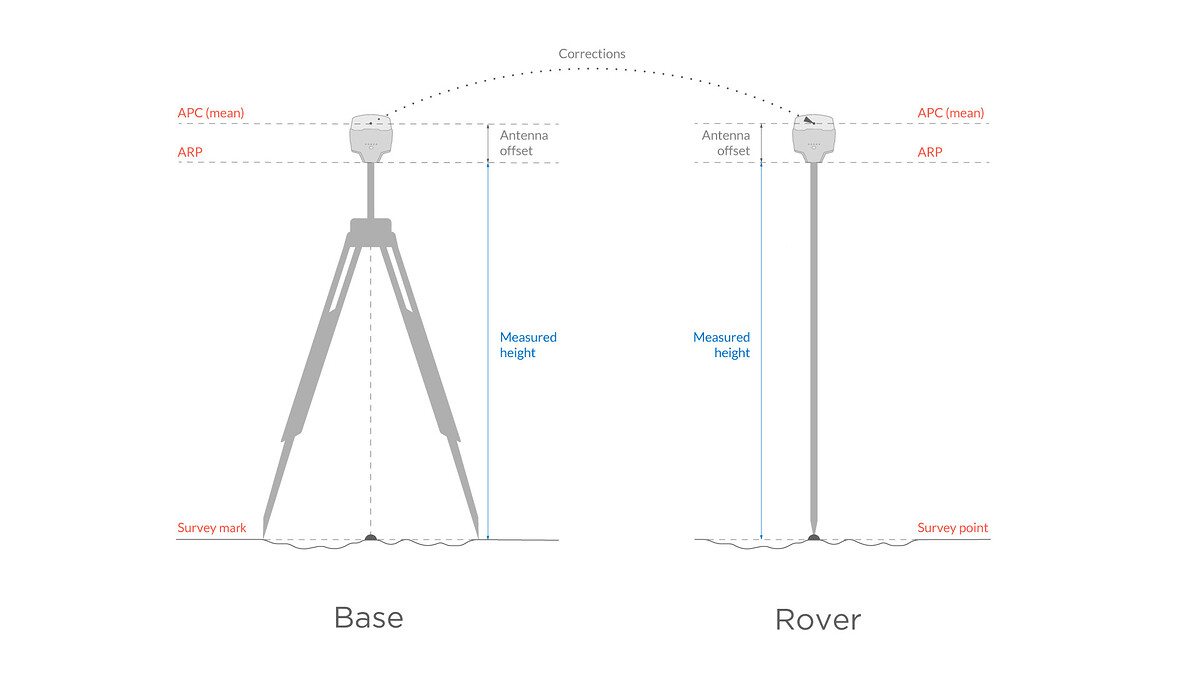
All GNSS observations refer to the antenna phase center (APC) of the receiver. The antenna is located inside the device, so it’s not convenient to work with its coordinates. A surveyor usually needs coordinates of points on the ground—whether you use a known point to place the base, or collect points with the rover.
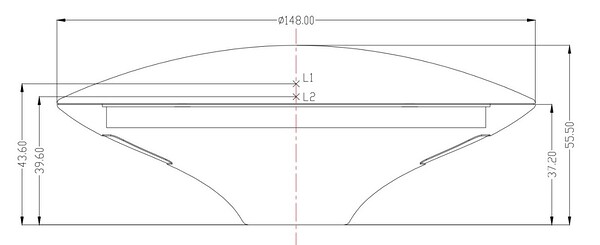
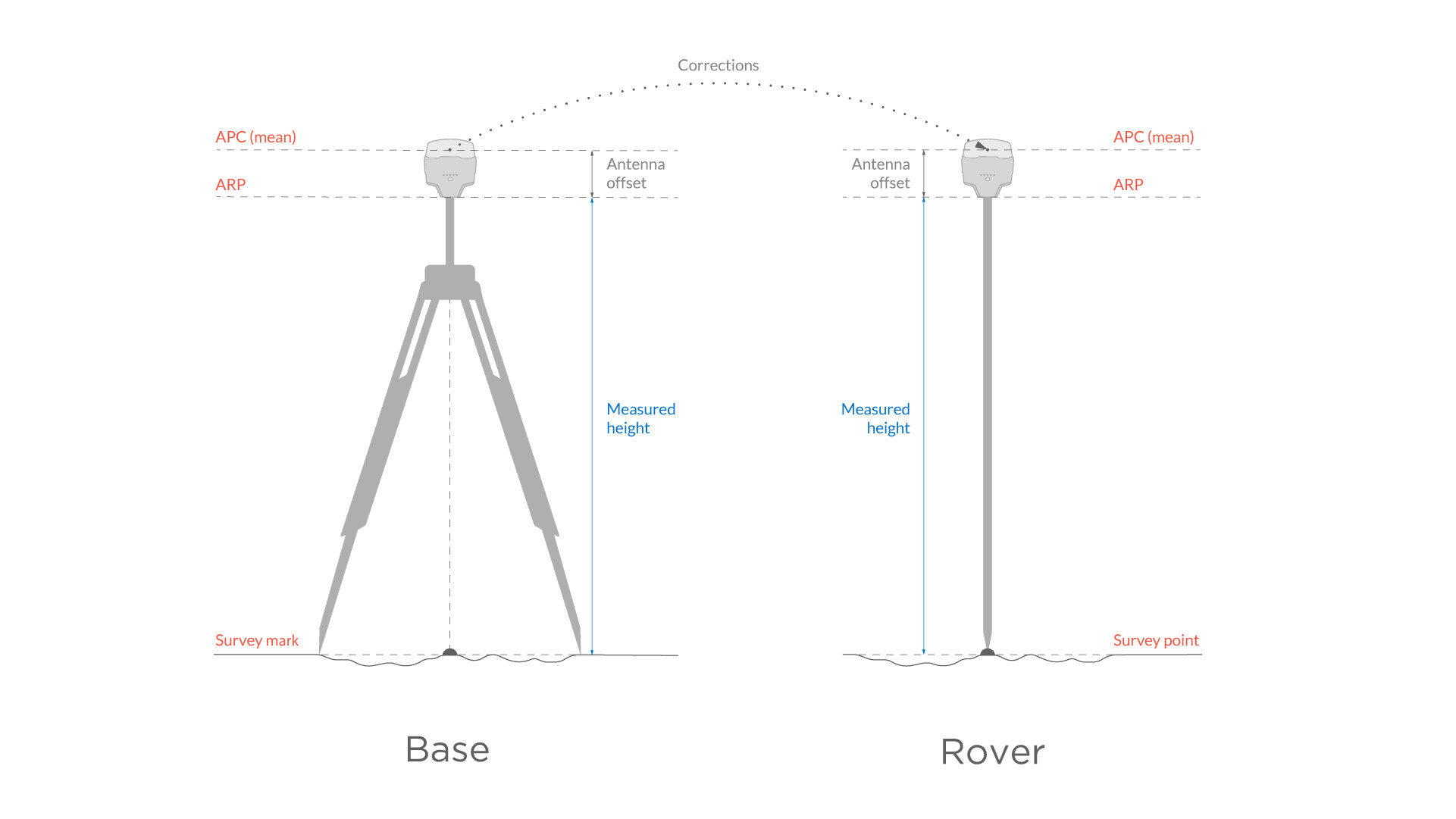
The height from the point on the ground to APC is a sum of the distance from the ground to the center point on the Reach’s bottom, antenna reference point (ARP), and antenna offset. The first of them is exactly what you need to measure and enter in the app. Usually, it’s just a tripod with an extension pole or survey pole height. The offset between the ARP and the APC is considered automatically by Emlid Flow (formerly known as ReachView 3).
And what is the math of it? Let’s check it for base and rover separately.
Base height
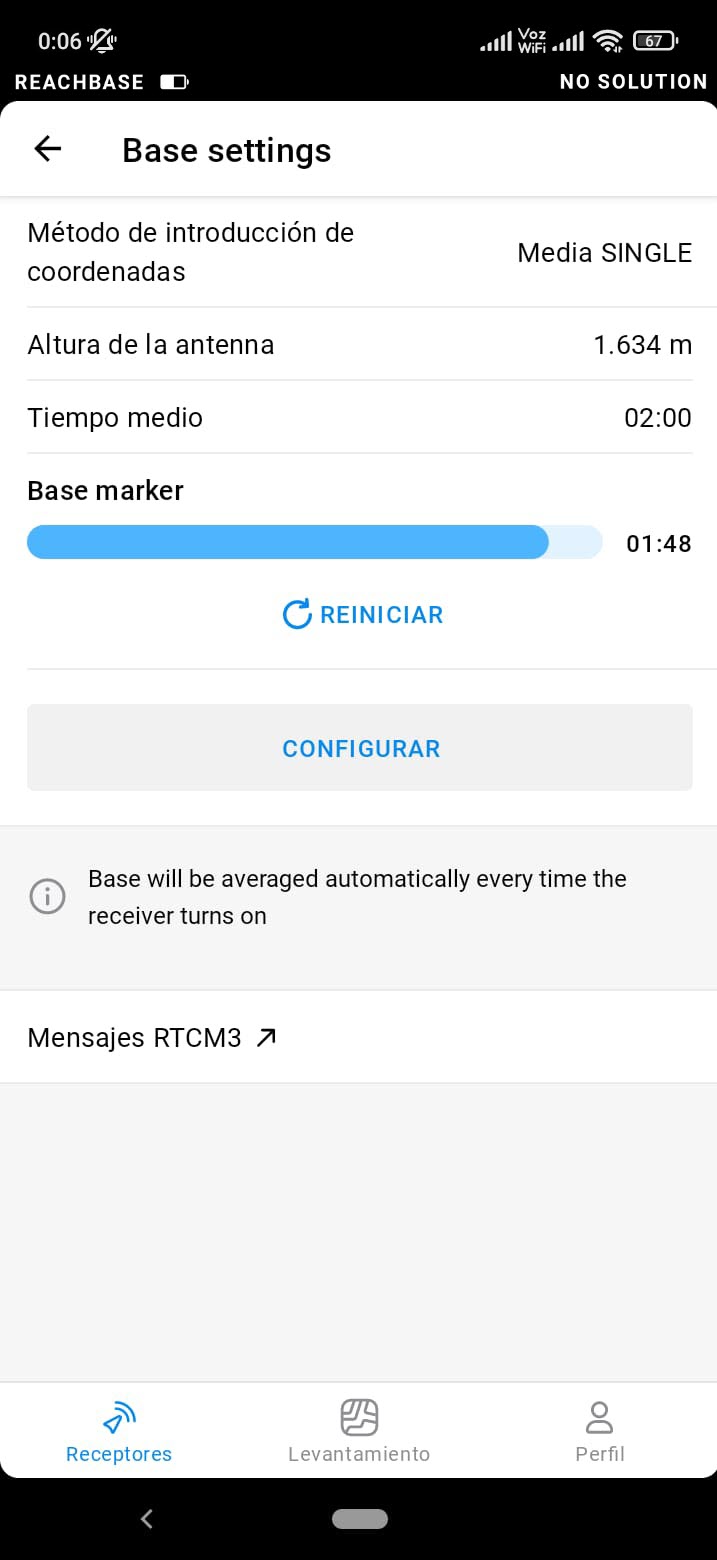
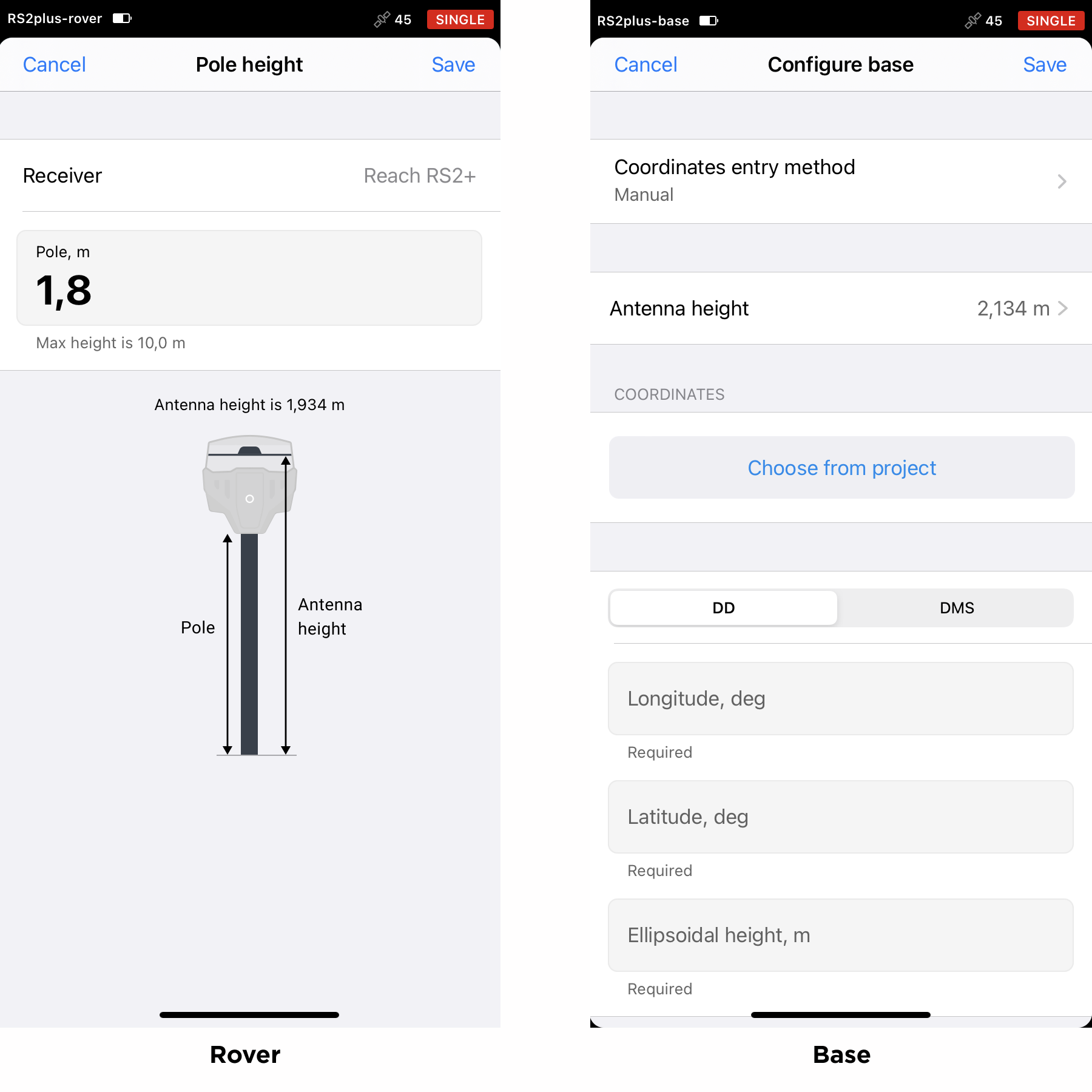
The base needs to transmit its APC position to the rover. But when you enter known base coordinates using the Manual coordinates entry method, they usually refer to the point on the ground. So, Emlid Flow takes the measured antenna height to calculate the APC position and sends it.
If you use the Average coordinates entry method, you have the APC position right away. So you don’t need to do anything additionally.
By the way, starting from the 30 Reach firmware, if you go to Manual entry after averaging and specifying the antenna height, Emlid Flow will calculate the point on the ground. You can save this position and use it for future surveys.
Rover height
In RTK, the rover calculates the coordinates of its APC. To find the coordinates on the ground, specify the pole height in the corresponding menu before collecting or staking out points on the Survey tab so that Emlid Flow could subtract it from the original measurements.
This is all about setting the antenna height for RTK. If you still have questions, feel free to share them in the comments. Next time, we’ll figure out how to handle the antenna height for PPK.
P.S. Don’t forget to check our previous post about choosing an NTRIP service to work with Reach RX.