We call Reach RX a network RTK rover, which means it receives corrections from a base via NTRIP. It can be either your own base connected to Emlid NTRIP Caster or an NTRIP service.
In the previous post, we described the workflow with your own base. This time, we’ll discuss how to choose an NTRIP service which suits you best. Below, we’ve listed some things you need to pay attention to when considering using NTRIP. Often, this info can be found on NTRIP service website, but sometimes you need to reach out to a service support directly.
Data format
Reach devices, including Reach RX, work with corrections in RTCM3 format only. This is the standard format in the industry, and most providers support it. But still, it’s better to check it additionally.
Required data
To calculate a solution, Reach RX requires at least:
- The base’s antenna reference point coordinates with antenna height. It’s provided in 1006 RTCM3 message.
- GPS observables. There are several RTCM3 messages containing this info. One of the most popular is 1074 GPS MSM4.
Of course, Reach RX also reads GLONASS, Galileo, and Beidou data. But the ones listed above are a minimal subset.
Baseline
Reach RX is a multi-band device. So, the maximum distance between base and rover in RTK is 60 km (37.2823 miles). Check the map of reference stations and make sure there is one within this range.
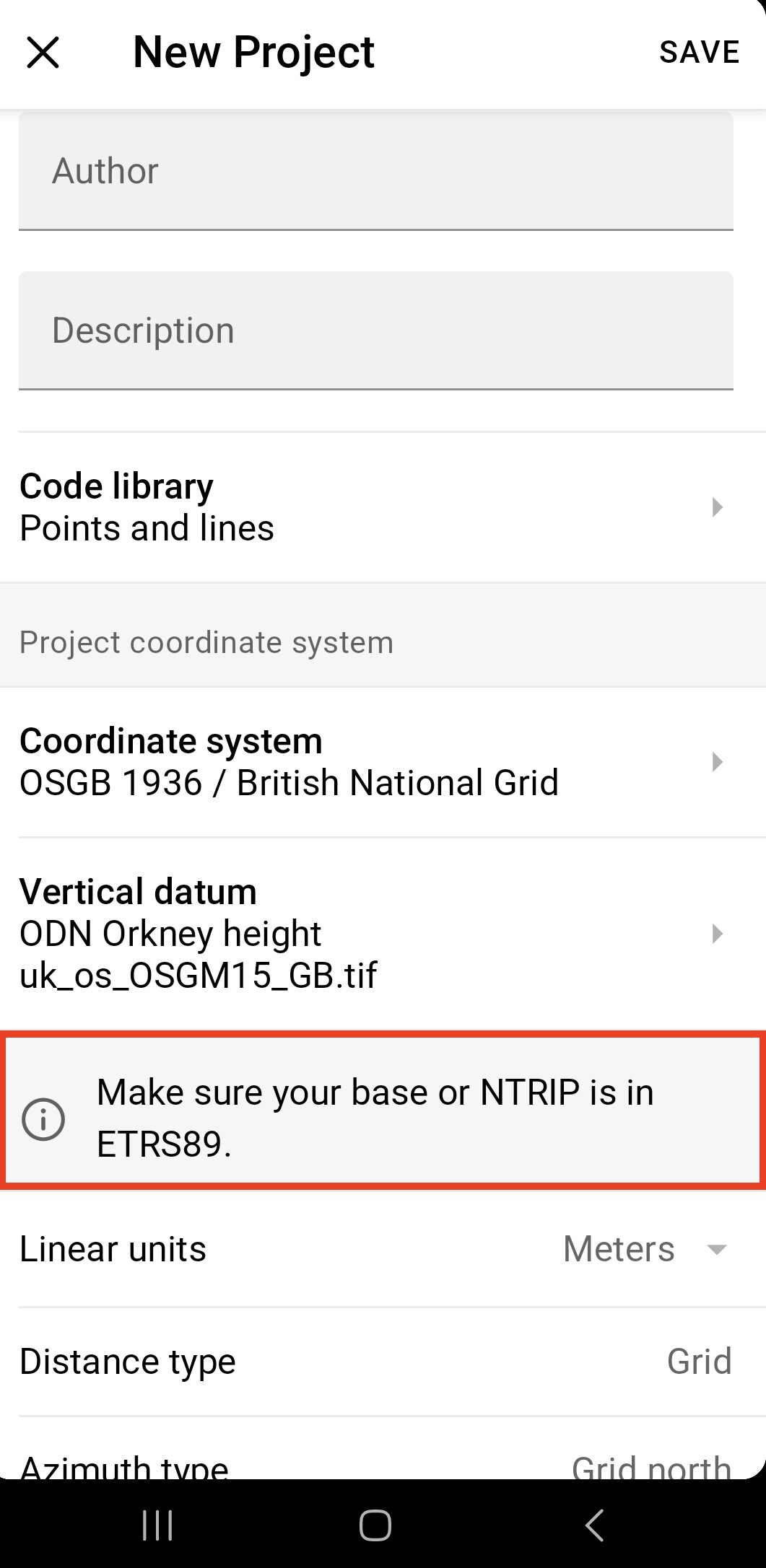
Coordinate system and vertical datum
Emlid Flow (formerly known as ReachView 3) supports plenty of coordinate systems and vertical datums. Each of them requires a base to be in a specific datum as well.
When completing coordinate system and vertical datum setup, check a small tip: “Make sure your base or NTRIP is in …”. For example:
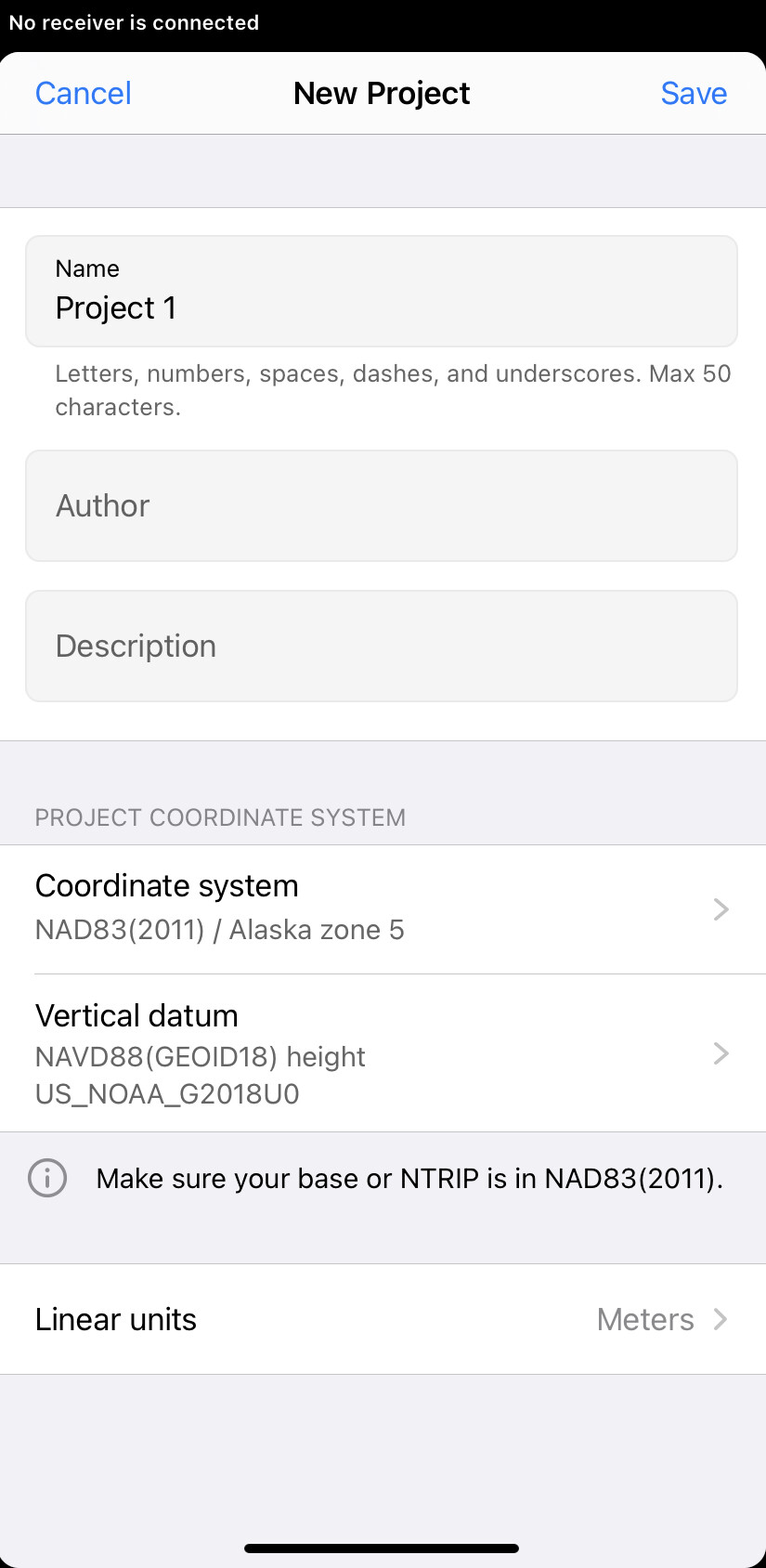
So, just follow this tip!
That’s all! By the way, you can use the same suggestions if you work with Reach RS2+.
As always, don’t hesitate to ask additional questions in the comments!