



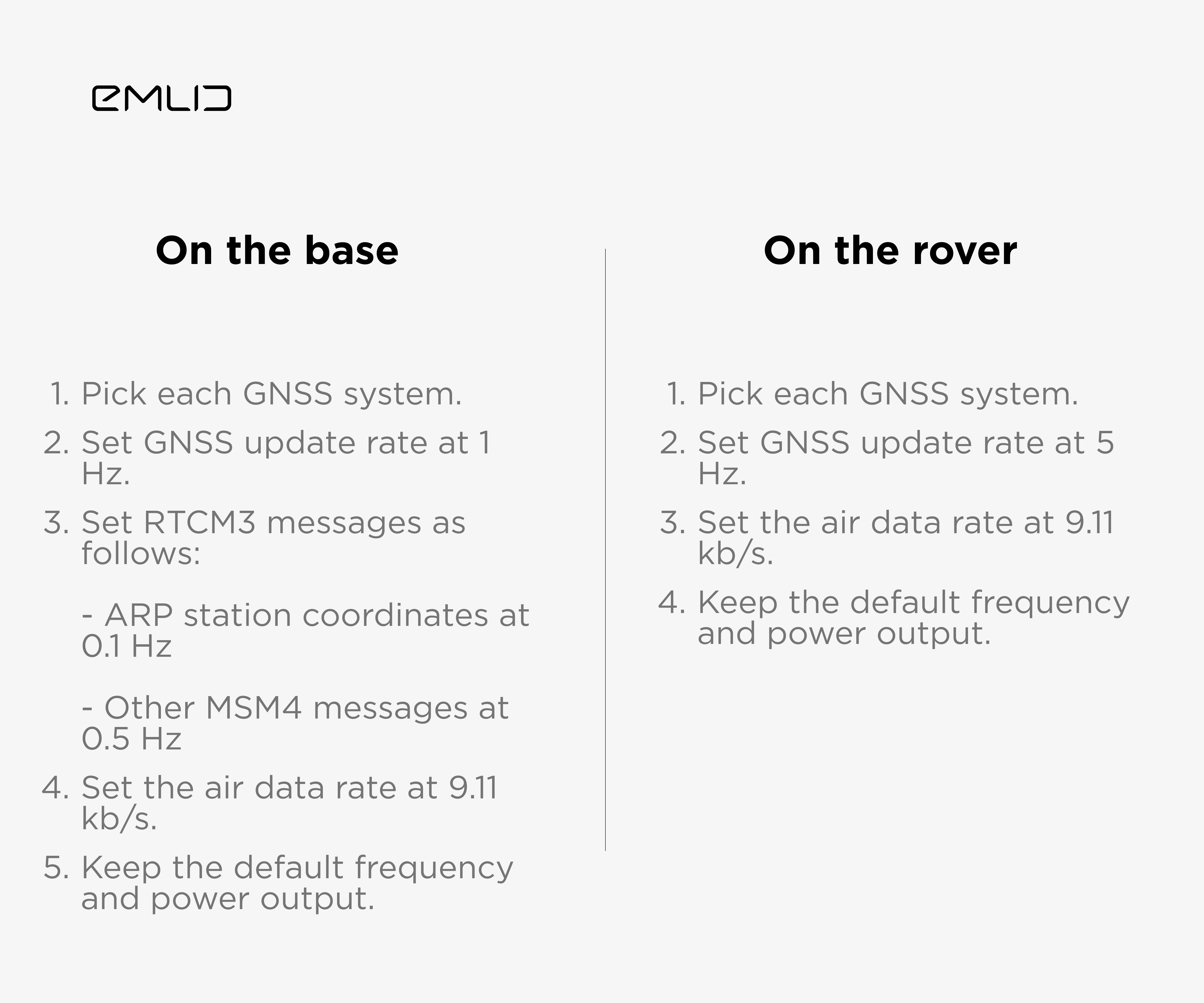
Today, we will discuss the LoRa radio setup for RTK on Reach RS2+. To begin, connect LoRa antennas to the receivers and configure your units following the steps from our Base and rover setup guide. Double-check the default settings below:
And here are a few more tips to make sure you have an optimal setup:
-
Place the receivers in the line of sight
The operating distance of the LoRa radio decreases as the number of obstacles on the signal path increases. In the line of sight, the baseline can reach up to 8 km, while in densely vegetated areas, it may reduce to several hundred meters.
-
Mount the receivers on a survey pole or tripod of at least 1.8 m high and level them
The sky view is crucial for the receivers. So it’s necessary to place the unit as high as possible to minimize any nearby obstacles, including yourself, that could block its view of the sky and level it.
-
Set the proper base coordinates in Base setting
The correct latitude, longitude, and ellipsoidal height of the base are essential for achieving a FIX on the rover. Make sure you have the correct geographic coordinates in the Base settings tab. If you only have the local coordinates of the base, follow this tip to configure it correctly. -
Try different frequencies from the available range
Sometimes, the frequency from the allowed range in your working area may be already taken. Set the frequency to the highest allowed value and check the maximum LoRa range you can get with this frequency. If the frequency range is insufficient, decrease it by 1-2 MHz until you find the optimal one for your area.
Using the default settings will work in the majority of cases. That’s why we recommend you try them first. However, sometimes, you can increase the LoRa baseline additionally by lowering the air data rate.
- Lower the air data rate
A high air data rate allows more RTCM3 messages to be transmitted. Lowering it limits the number of RTCM3 messages but may increase the baseline. Test the setup with 9.11 kb/s and then with a 4.56 kb/s air data rate (set the same rate on both the base and the rover).
Note that the available air data rate depends on the number of RTCM3 messages you have selected for output. You can configure them manually, but ensure that the messages with the ARP of the base and GPS observables are enabled.
That’s it for today! As always, feel free to ask any questions by leaving them in the comments.
P.S. Here is a link to our previous post about Setting up your Reach RS2+ as a base for DJI RTK drones.