



My return of experience on Navio2 is as follow:
1°) Problems with GPS seems that ardupilot 3.6… is not sensitive to GPS communication flow, i had no issue in 3.6 but not sure the GPS was providing accurate data (strange behaviour compare to other controllers) upgraded on 4.04 and recently on 4.03 (with emlid latest image disk) i had many “Unhealthy GPS signal” messages with are (i beleive managed with ardupilot 4.x that does not allow to switch to “Gps” modes such as RTL auto Loiter, and turn automatically to non GPS mode in flight …)
I thought that the Raspberry pi 2 might be not fast enough (to manage serial properly) i tried Raspi3 instead, seems to have same behaviour (unstable in loiter or poshold good in althold)
“Unhealthy GPS signal” messages again.
2°) Navio2 is not able to use taranis telemetry return, it seems that its not supported
3°) Communication errors on Sbus, (all 16 PWM turned down to 874 during 0.3sec crashed the drone a couple of time. (no idea why, but enough to crash)
=> I decided to give up, and switch to more conventional autopilot controller on that project ;o(
Dear All,
I’m posting here because i’ve been investigating for days trying to fix GPS UNHEALTHY problem.
My Hdop is good 0,75 i can get 15 satellites,
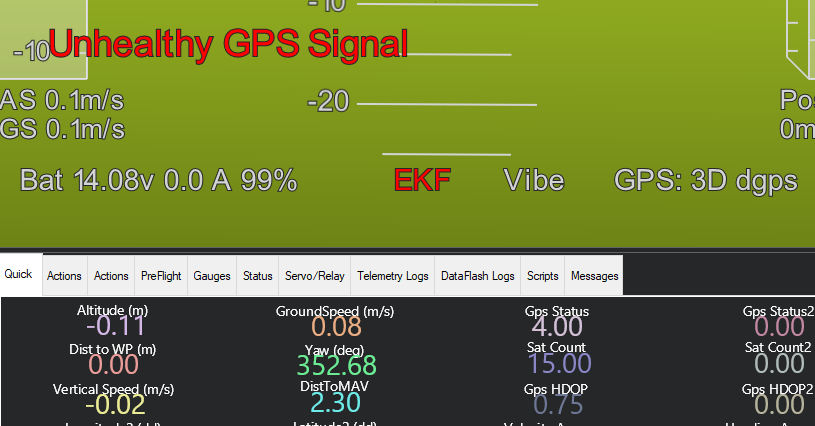
I’m afraid that the problem comes from a communication issue as the message are displayed as:
18/09/2020 12:46:36 : PreArm: Need 3D Fix
18/09/2020 12:46:25 : GPS 1: detected as u-blox at 38400 baud
18/09/2020 12:46:16 : GPS 1: detected as u-blox at 460800 baud
18/09/2020 12:46:11 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:46:06 : PreArm: Need 3D Fix
18/09/2020 12:45:57 : GPS 1: detected as u-blox at 57600 baud
18/09/2020 12:45:49 : GPS 1: detected as u-blox at 115200 baud
18/09/2020 12:45:40 : GPS 1: detected as u-blox at 57600 baud
18/09/2020 12:45:36 : PreArm: Need 3D Fix
18/09/2020 12:45:28 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:45:22 : GPS 1: detected as u-blox at 38400 baud
18/09/2020 12:45:15 : GPS 1: detected as u-blox at 115200 baud
18/09/2020 12:45:08 : GPS 1: detected as u-blox at 460800 baud
18/09/2020 12:45:06 : PreArm: Need 3D Fix
18/09/2020 12:45:04 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:44:59 : GPS 1: detected as u-blox at 57600 baud
18/09/2020 12:44:55 : GPS 1: detected as u-blox at 38400 baud
18/09/2020 12:44:44 : GPS 1: detected as u-blox at 230400 baud
18/09/2020 12:44:36 : PreArm: Need 3D Fix
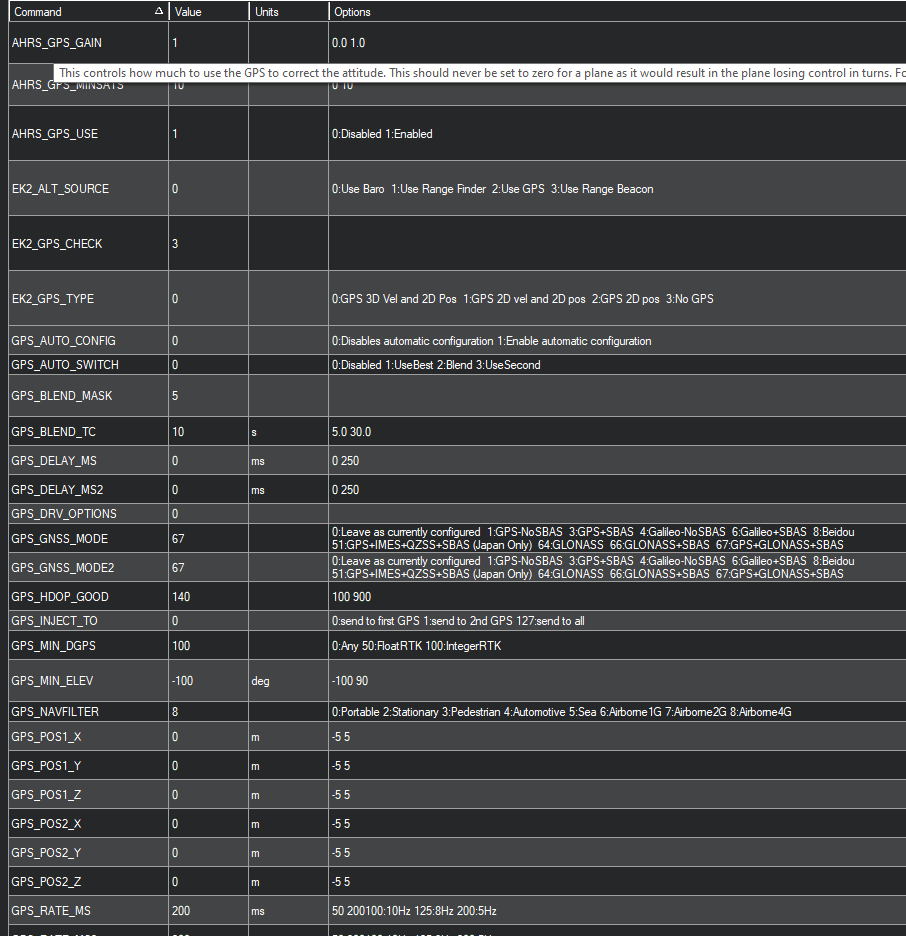
i reduced the speed to 5 Hz (200ms in GPS_RATE_MS) less messages but still GPS UNHEALTHY:
(after restarting ardupilot)
18/09/2020 12:55:17 : PreArm: Need 3D Fix
18/09/2020 12:54:47 : PreArm: Need 3D Fix
18/09/2020 12:54:43 : EKF2 IMU0 origin set
18/09/2020 12:54:35 : EKF2 IMU0 tilt alignment complete
18/09/2020 12:54:32 : GPS 1: detected as u-blox at 115200 baud
18/09/2020 12:54:31 : Barometer 1 calibration complete
18/09/2020 12:54:31 : Initialising APM
18/09/2020 12:54:30 : Calibrating barometer
Attached the u-blox Diag :
diagnostic.zip (1.8 KB)
my ardupilot parameters are as follow:
I tried to disable the GPS to use alternative one on serial, but seems that the internal U_blox always talk, then evry mode using GPS is not allowed…
If someone knows about this issue ?
I’m using a raspberry Pi 2 (might be not fast enough ?)
Hi,
There have been issues in regards to GPS and compass in early versions of arducopter 4.0.
My understanding is that improvements have been made in 4.0.4 and further in 4.0.5.
Have had only limited flight time on later versions but did notice far less messages regarding “GPS-glitch” and compass related issues.
However, those latest versions are not supported by Navio and hence your coloured status LED won’t work. - But other than that everything works well in those versions.
Other info which might be helpful: Unhealthy GPS Signal?
In regards to Rpi2: Should certainly be powerful enough. if any doubt connect via SSH and simply enter “w” which will show processor load in a percentage value. - But this is only useful after about 15 minutes of up-time. Also would recommend checking this after a flight, not just on standby as usage / load values will be different in flight.
Hope this is of some help.
Hi ! I’m very late to the party but I found the fix for the “unhealthy GPS signal”.
If you are still here, does your GPS works well ? because mine doesn’t (or it comes from the EKF) and I’m trying to figure out why.