



Alright, I managed to fix the rate, but the gps is still very bad.
Rate fix:
Ardupilot will do the config so auto_config=1. GPS_GNSS_MODE should not use more than 1 constellation (otherwise you cannot reach 10Hz), in my case it is set to GALILEO so 4. GPS_RATE_MS=100 ms so you’ll run the GPS at 10Hz. I haven’t tested with SBAS yet
It is strange because the rate is awful at 5Hz (GPS_RATE_MS=200) but much better at 10Hz (GPS_RATE_MS=100)
10Hz:
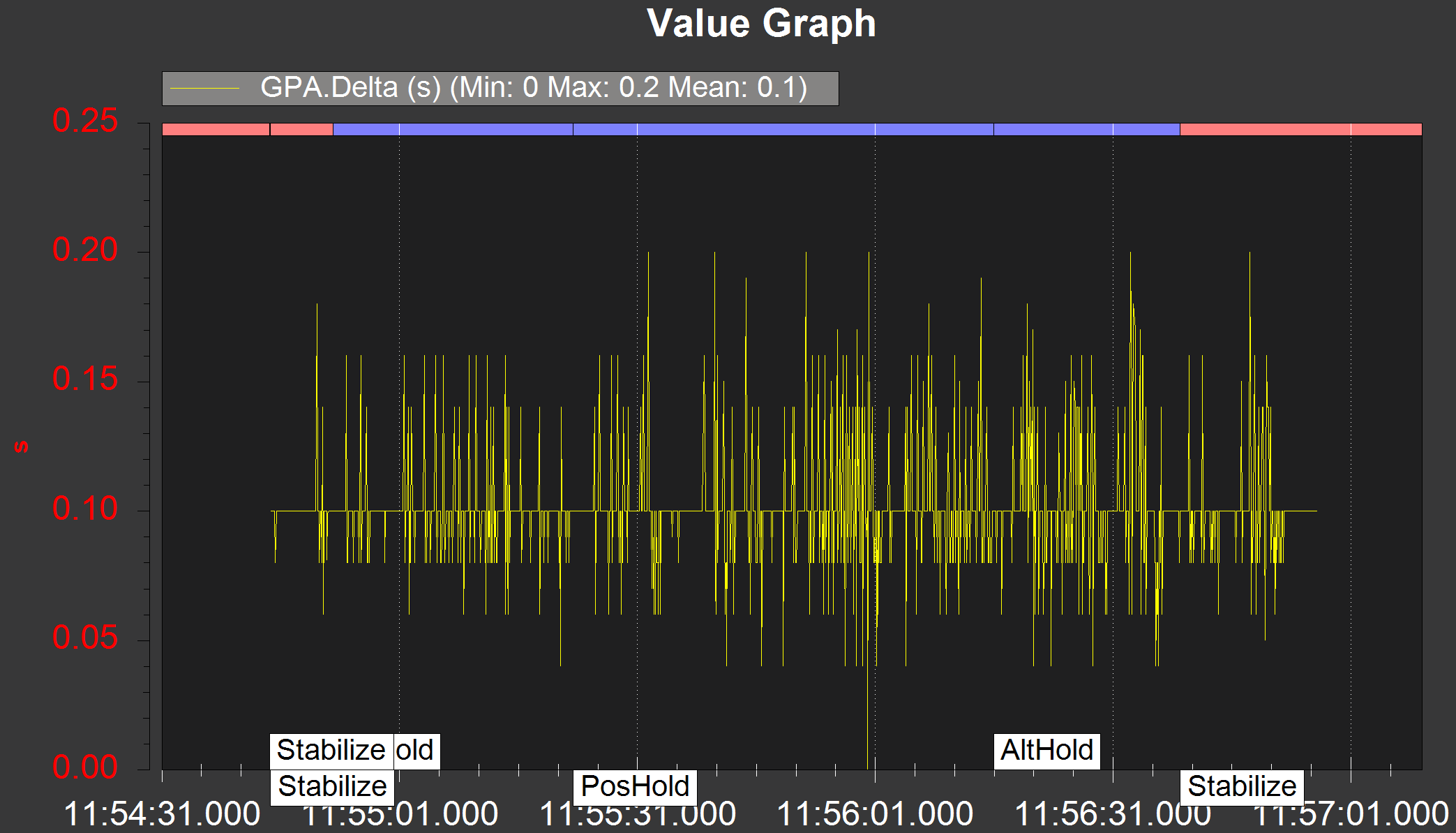
5Hz:
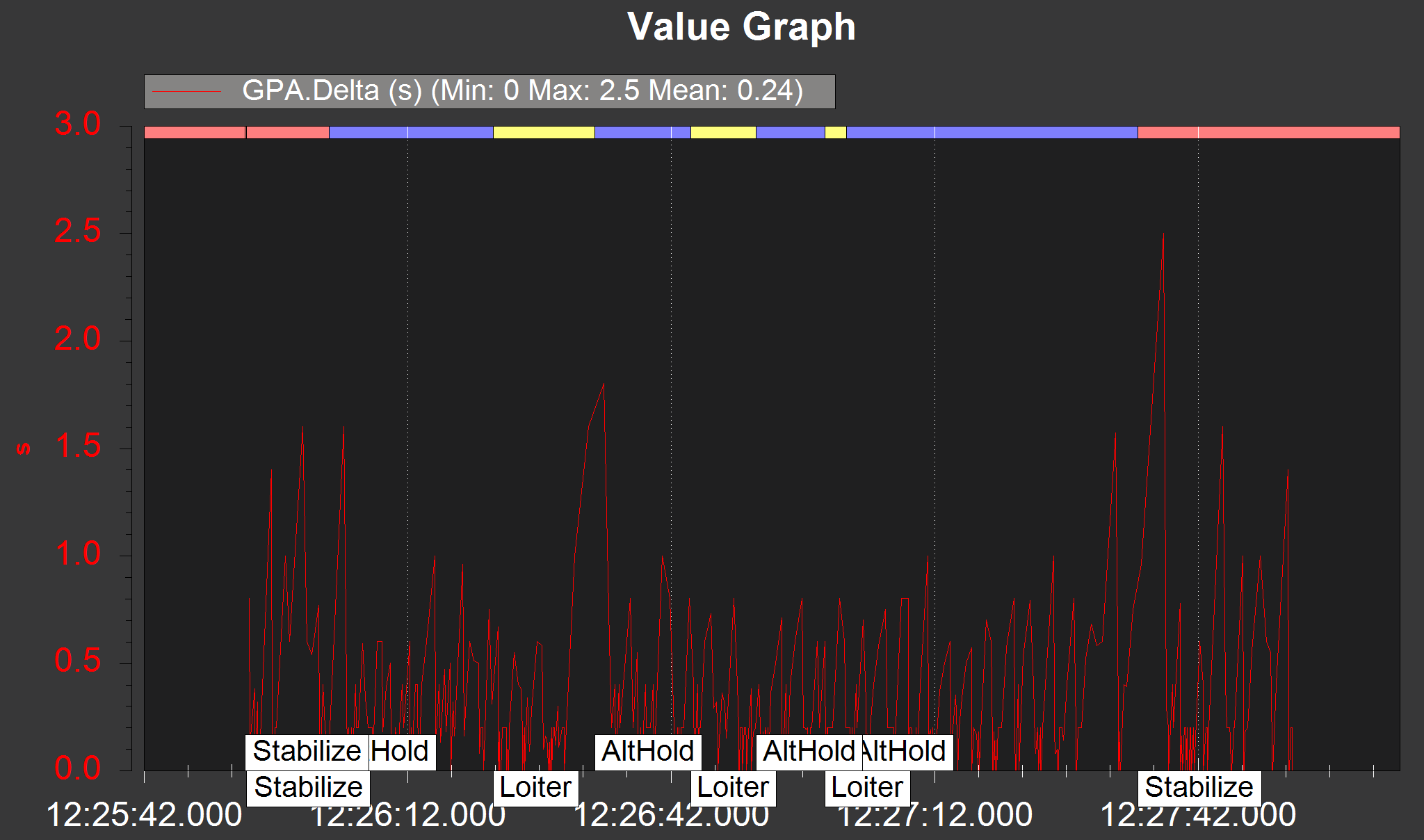
It continues to not work tough
The speed and position continue to not match:
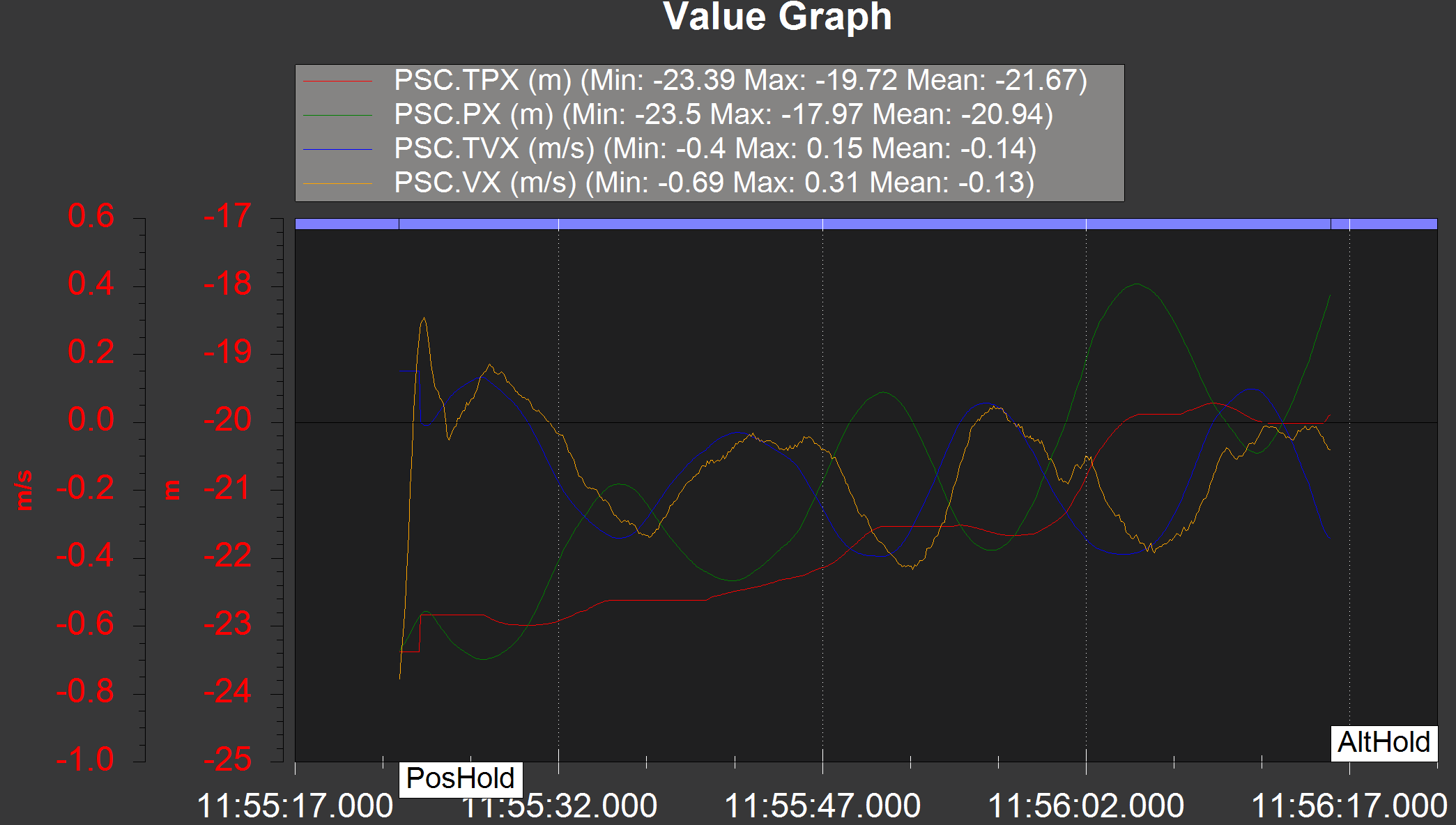
At this point I don’t know where it comes from. You’ll find today’s log here.