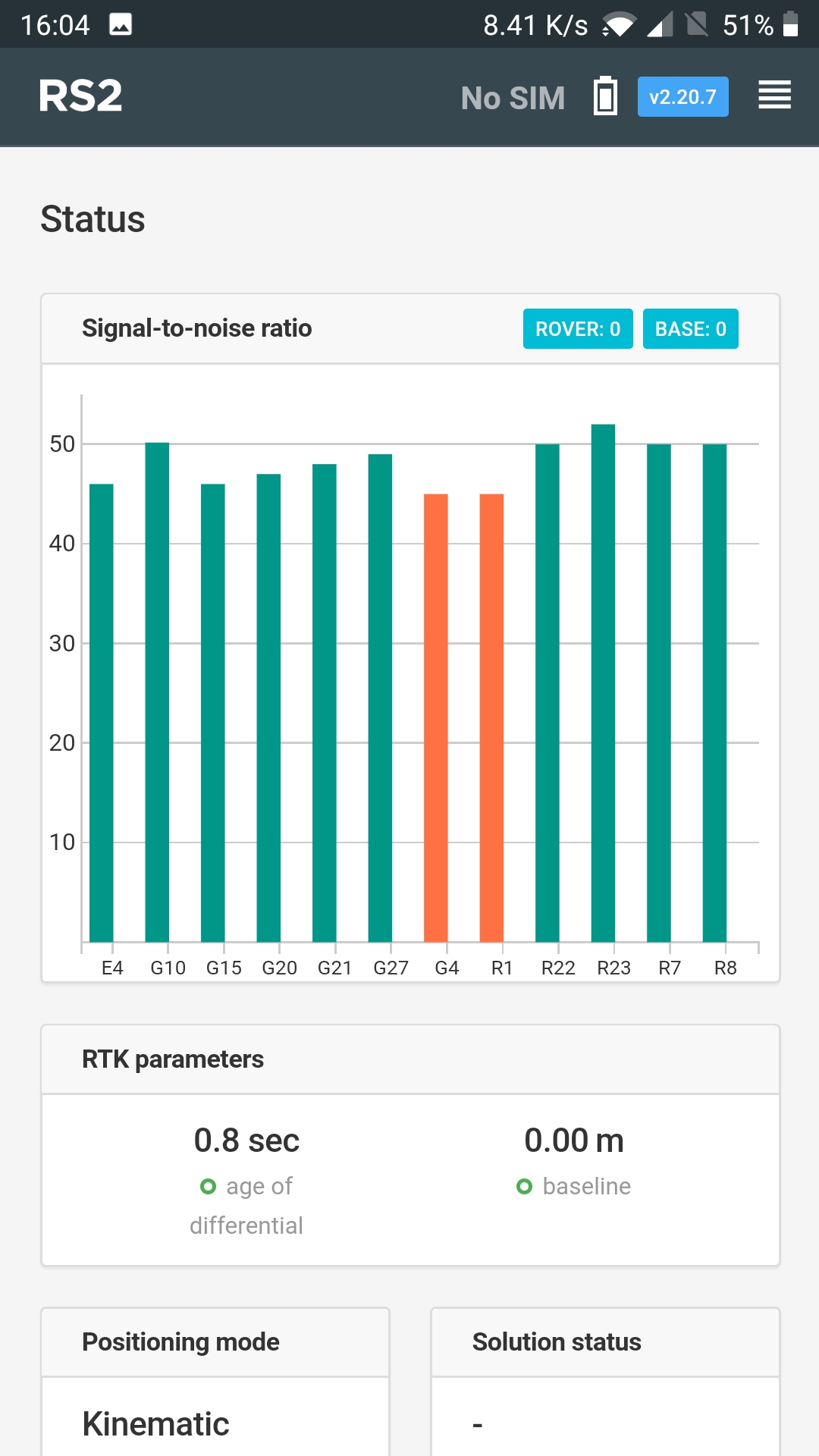
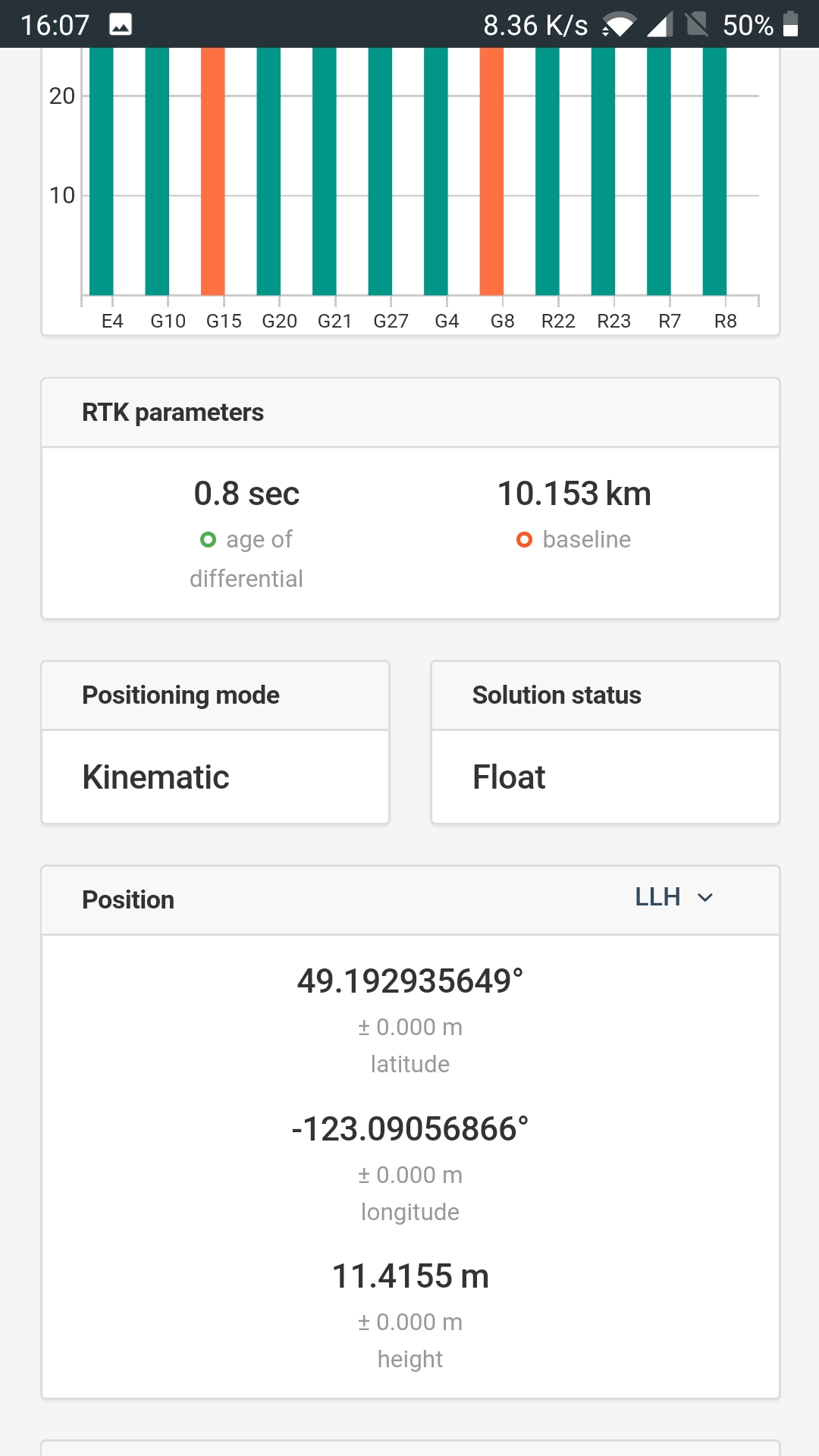
Today I attempted to receive corrections via NTRIP with the RS2. I have an account with a local provider here in Canada (CanNet). Achieved connection with the server no problem but couldn’t get RTK fix at all. Reachview status was acting strange as well. The position display would jump between zeros/dashes and a Single point solution. Very occasionally I’d see a flash of ‘Float’ in the fix status. See attached screenshots.
I checked the Corrections Input tab and confirmed I have connections and was receiving RTCM messages. I tried several different mount points on the service.
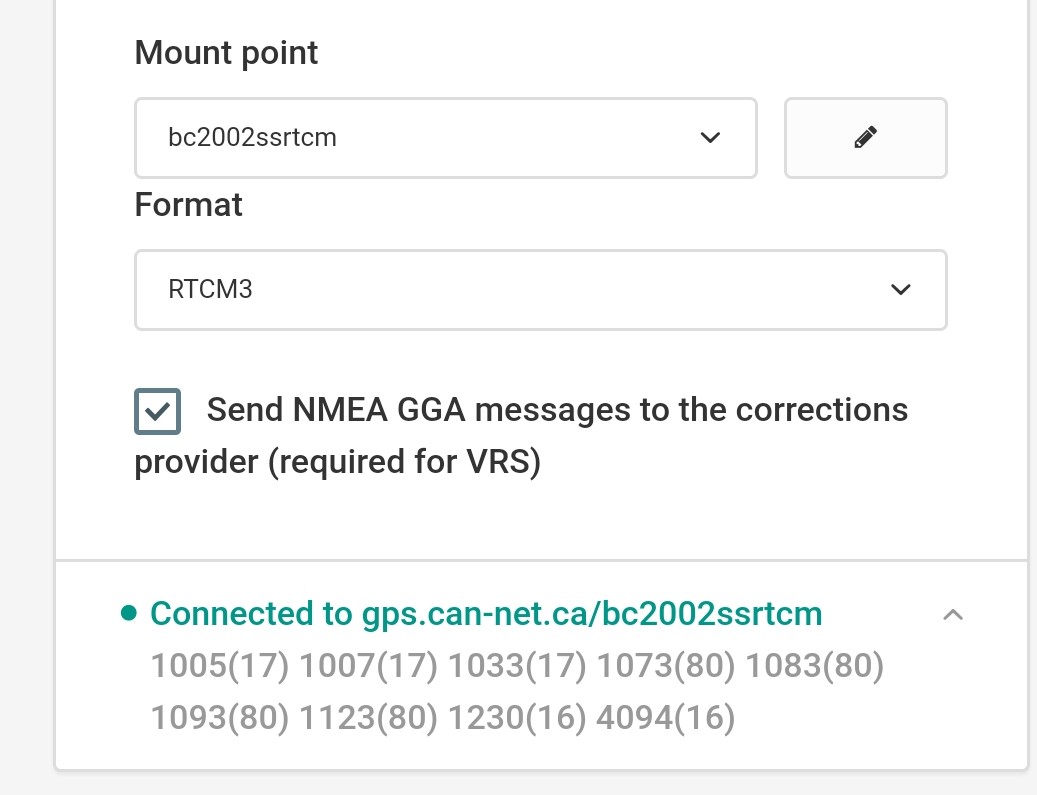
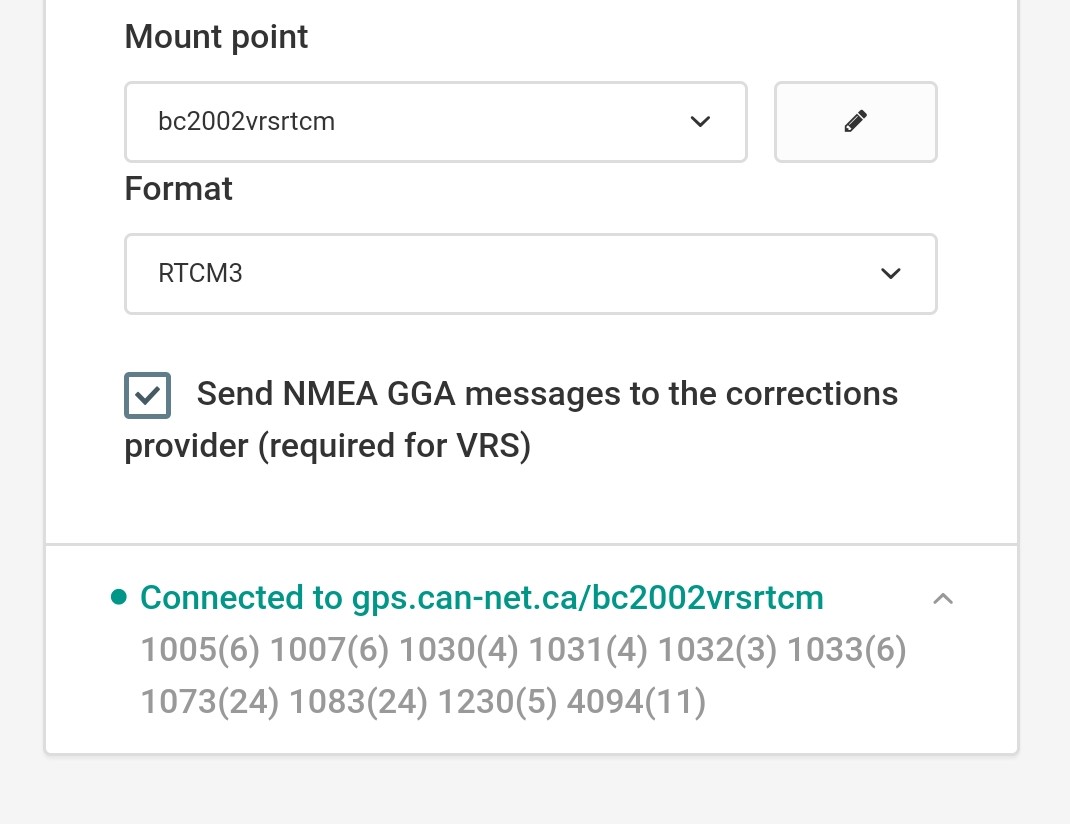
Looking at the RTCM messages I see they are MSM 1073 (GPS) and 1083 (GLONASS) which are MSM type 3. So can someone at Emlid confirm if RS2 is compatible with MSM Type 3? I’m using latest version of Reachview (2.20.7). Thanks.
I will check with the provider but I suspect that only MSM type 3 is available with the RTCM mount points. All the other mount points were either CMR+ or CMRx message styles. This provider is a Trimble equipment dealer and I believe one of the messages, 4094, is Trimble proprietary.
Yes I reached out to the provider and they confirmed that they are only providing the MSM3 messages. They did mention that they would look into providing the newer messages but had to check with Trimble to confirm backwards compatibility.
Good to know about RS2 requiring MSM4, 5 or 7 types.
I became aware last week that the RS2 - in base mode - only sends out MSM4 corrections. Hence my other thread in Getting Started.
…BUT I hadn’t clocked that an RS2 rover will similarly only utilise the more modern MSM4, MSM5 or MSM7 type RTCM3.2 correction messages from the base.
I’ve only successfully tested my RS2 rover with another RS2 as a base and a handful of public mount-points from the RTK2go public caster. As it turns out they happened to all be sending out MSM messages…
I haven’t tested with my own Leica GR50 base just sending out bog standard 3.1 corrections as it’s off being repaired at the moment.
So @tatiana.andreeva will an RS2 rover not be able to successfully utilise “classic” (GPS + GLO only) corrections - that is RTCM 3.1 messages?
Reach RS2 should work with RTCM3.1 without any issues.
However, different receivers may provide different correction messages, so it’s hard to say certainly how it will work without knowing which exactly messages a base transmits or without testing.
Would you be able to provide a list of supported RTCM3.1 messages? I think this would be handy for anyone looking to verify compatibility with other receivers. Thanks,