Sorry to reopen this thread but I tried adding an extra GPS module but wasn’t able to make it work. Hereis how I am trying to do it
I am using a GPS module based with the Ublox Neo-m8n chip and I am connecting it via the UART port
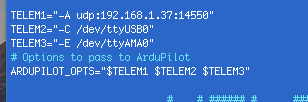
My etc/default/arducopter is as follow: ARDUPILOT_OPTS="-A udp:192.168.1.29:14550 -E /dev/ttyAMA0"
I am not using radio telemetry so I removed the -C option.
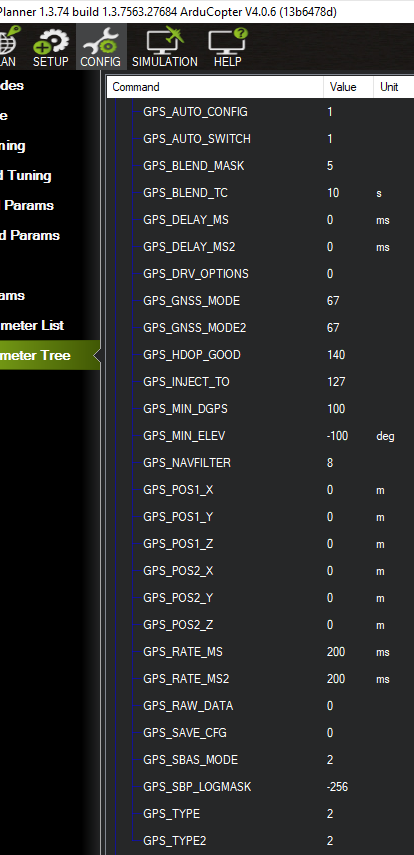
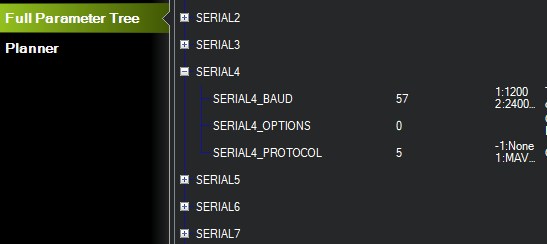
I’ve set the mission parameters GPS_TYPE2, GPS_AUTO_SWITCH and SERIAL4 as instructed.
Before plugging GPS to UART Navio2 port, I checked configuration with UBlox utility and adjusted UART serial speed at 57600 and other parameters according to my need (I do not use GPS_SAVE_CONFIG option). I use the same method for the Navio2 GPS (ublox utility).
38400 was a remain of “old APM time” with M6N GPS generation. Now, M8N is able to process GPS and Glonass at 5 hz with NMEA and UBX data flow. Setting UART at 57600 or 115200 with M9N is quite common when board is able to do it.
When you get this message in Mission Planner, it’s essential to review your copter’s hardware setup. Please check that the receiver is placed far from the other electronic components. The proximity to electronics might affect the reception of the GPS signal.
I also suggest taking a look at this thread where you might find some tips for resolving this issue.
I managed to connect the to the second GPS using ublox u-center and a UART-USB conversor. In u-center the baud rate is initialed listed as 9600 which I found it odd since I was using 38400 in the SERIAL4_BAUD parameter. Nevertheless I manage to change it to 57600, however once I connect to mission planner it says on the "messages"tab that the detected baud rate is 115200 (which also happened in one of your images). Do you know what is happening?
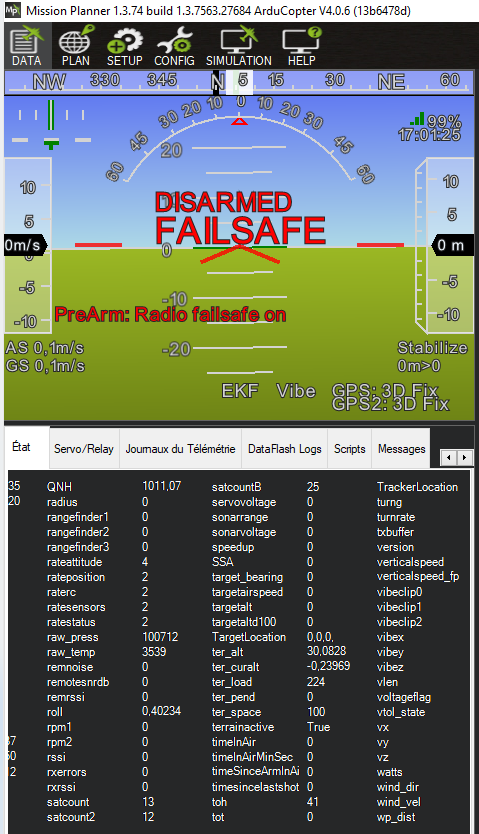
Apart from this minor inconsistence the external GPS appears to be working fine and I was able to fly the drone in loiter mode without much issue. On other hand the internal GPS of NAVIO2 still appears to have some problems, since I keep getting the “Unhealthy GPS Signal” if it is active.
The copters hardware seems to be alright I am mounting both GPS’s on an elevated antena and putting a metal plate bellow it. At the moment I have the copter disassembled but once I assemble it back I will take a picture.
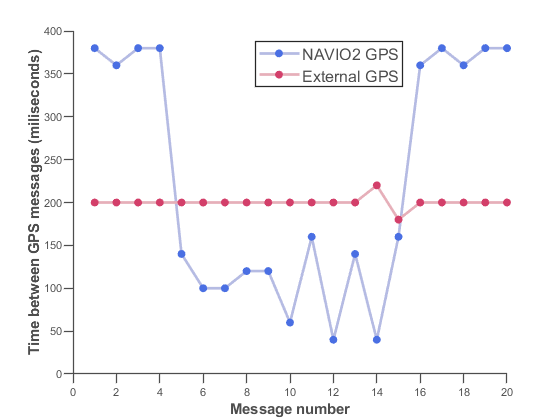
The problem seems to be the delay between messages from the GPS, where the NAVIO2 unit can’t keep up with the 200ms threshold. See the image bellow where I plotted the “GPA Delta” field from both GPS units. Any ideas what is happening? Thanks
I will also check the thread you suggested. Thanks.
Navio’s GPS continues to be unusable though. Would you be kind enough to try your Navio’s GPS in Loiter to see if it works on your setup after the fix ?