Hello, everyone. I am tired of placing huge amount of GCPs and recently I was looking for ways to integrate DJI Phantom with Emlid Reach. And I have found several options:
Integration through photosensor attached to front LED on Phantom’s body made by Simon_Allen. It is affordable, but it has approximately 30ms uncertainty because front LED acts as middleman, providing signal to photosensor. Probably, it is not good enough for me. Snap PPK from Tuffwing has same principle, just more presentable.
More properly integrated commercial solutions, whose posts(1,2) can also be found on the forum. But their solutions cost an arm and a leg, and I can not afford it. 4 grand is hell of a lot of money for a graduate student. To be fair, it is still cheaper than DJI’s solution, but (read ↓)… Probably, it is for people, who want ready-to-go solution and have no problem with money. Unfortunately they do not share their know-how or sell just integration board. For me it does not make sense order whole Phantom drone from Russia, Finland or somewhere else, when I can buy drone where I live and modify myself.
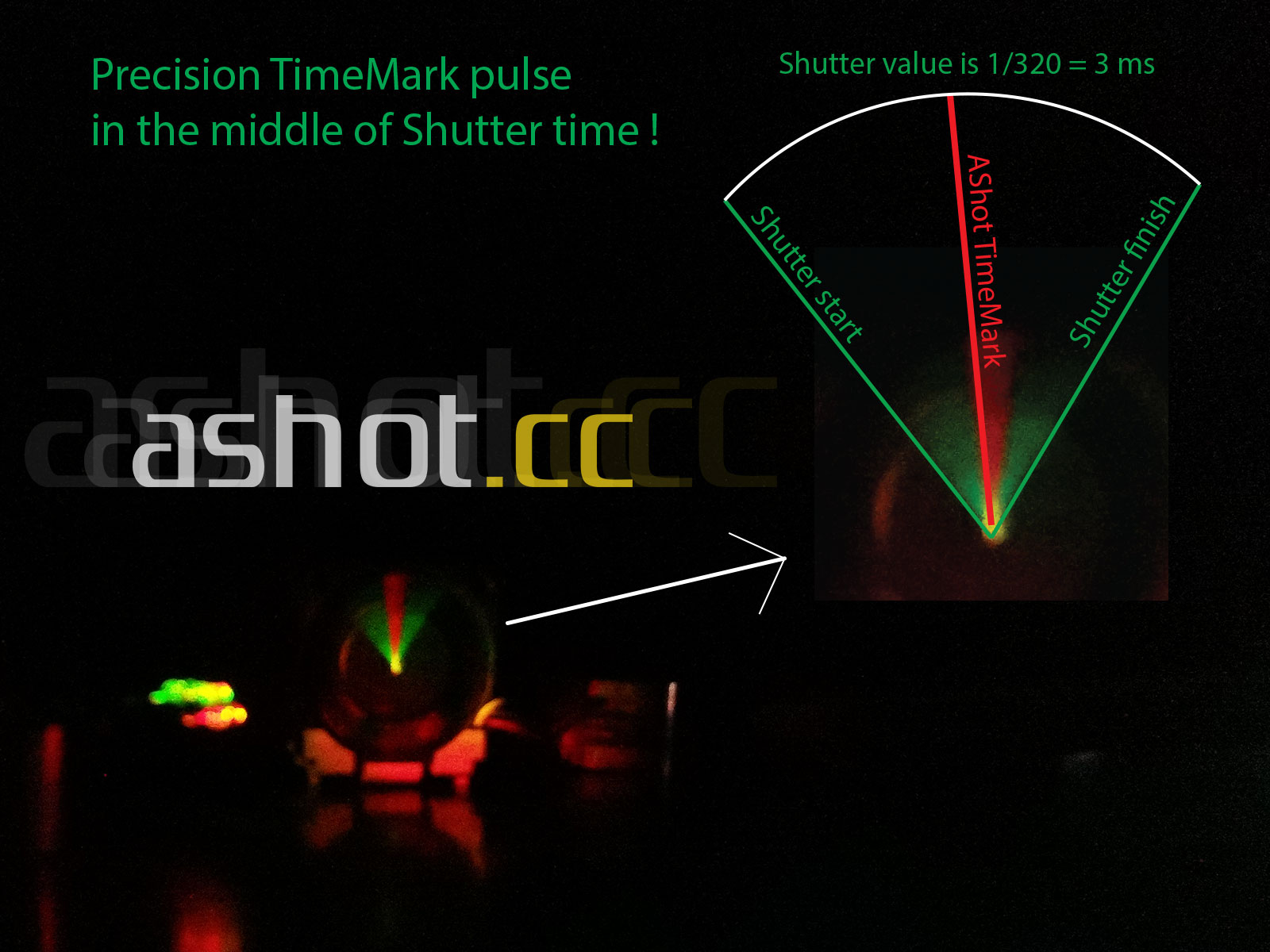
I also found some integration board called Ashot. They promise direct integration between Phantom 4 (Advance/Pro) and Reach M+ and costs 380 bucks. Also, at this moment only pre-order avaliable. They say that shipment will start at 20th of March. Looks like dark horse… I got half a mind to risk and pre-order it. They promise extra feature (reduce the shooting interval up to 1.2 second, so you might increase overlap or fly at higher speed) and high level of integration (board should send time mark to the Reach M+ right in the middle of shutter time, hence there is no delay).
What do you think about Ashot? Do you think it is legit? Or did I miss another cheap solutions? Please, share your thoughts and ideas.
I can vouch for the TuffWing kit I got from @Brian_Christal. The 3D printed mounting system works great and is decently presentable. The only downsides that I am finding a workaround for is that the antenna is not collapsible or easily removable and I have had a few flights with a missed event in the log, but I’m supposedly getting different wiring that should fix that.
When you speak of milliseconds of delay you are talking approximately 0.001’ per millisecond at typical flight speeds of 15 to 20 miles per hour. When you mount the TuffWing properly with the Emlid antenna directly over the center if not slightly forward of the center of the aircraft you are dead over to a little front of the center of the camera at flying pitch of 15-20 degrees.
The ashot definitely looks intriguing, that I would definitely not trust anything they say about capture times. There is a known issue with the DJI SDK ability to continually shoot pictures at regularly spaced intervals for long periods of time without an occasional missed shot. It’s very doubtful that there solution will fix this issue and most likely will make it worse.
Definitely don’t waste your money on those expensive kits before you spend $300-500 on one of these. I just bought a second TS kit to start mounting on a Yuneec H520.
Lastly, I will say that in my opinion you should never get rid of GCPs entirely, but I have gone from setting anywhere from 10-30 down to 3-5.
Wait a minute. 20 miles per hour is 29.(3) feet per second. 29.(3)/1000 = 0.029(3) feet per millisecond. So, 0.029(3) * 30 millisecond = 0.879 feet. Almost 1 feet.
For those who prefer metric, 0.879 feet is around 27 cm. Or if you fly with speed 10 m/s, then 10/1000=0.01 m per ms = 1 cm per ms. So 30 ms of uncertainty gives us 30 cm of shift.
As I understand, you can make some tuning to get better accuracy, because all time marks shifted in certain way. But still there will be a limit for tuning due to inconstancy of drone’s speed(wind and maneuvers). Also I would like to avoid extra work. So kits using LED as middleman are big no-no for me.
Sure, I will leave GCPs for checkpoints. Absence of checkpoints will raise a lot of questions from reviewers.
I might be wrong, but as I understand, Ashot will take over control of camera, so that’s why you will be able to take a shot often than once every 2 seconds. There was older version of board, which specialized only on reducing shooting intervals, so developers already know their stuff.
Good stuff @mkungaa, I did miss a portion of my math. I never fly above 20mph and with my typical overlays I am at about 15pmh. Including the average 15deg of tilt when the drone is in flight there is virtually no latency, but if you don’t account for that or your antenna is an inch behind the camera in flight the it would be the 20-30ms latency. In that configuration you would get about 3.5in of shift. Here again I go back to GCP’s that eliminate that eliminate any shift.
Once the corrections are made you can get down around 0.1 foot accuracy horizontal. Vertical is a little more difficult, but with a good camera calibration about a 0.2 foot or better. This is using GPS and Glonass recording at 5Hz.
Where are you located? In many places in my area introducing GLONASS and that low transmission speed causes cycle slips. I get the same thing sometimes when I am surveying normally with base and rover. Could you please briefly describe your workflow?
With the Tuffwing Emlid system and 4-5 GCP’s I am getting much better than that through a QGIS workflow and stakeout in the field.
logging GPS + GLONASS @ 5Hz works just fine here in SE Australia on my M+. More reliable for me than GPS only @14Hz in terms of fixed solution and that’s all that matters to me.
I can potentially gain a couple of cm accuracy over my current setup, but if the installation is straightforward, and the drone is still compatible with the Map Pilot app then I will get one. Powering the M+ from the drone is really nice and will save about 60g-80g, and simplify the setup if cabling is straightforward. I would assume a bit of cutting is required to get the signal and power wires outside to the M+ but I’m ok with that.
It’s just my personal opinion, but a company that puts out a product that leaves a circuit board in the elements is not a very good engineer. I also doubt their capability to take over the camera without causing other problems in the system.
I’m in Maine. I tried GPS only with 14Hz, but had more trouble getting and staying fixed. I’m using Emlid b27. I was having trouble setting the base coordinate with the more recent versions. Also, I’m using a Trimble R8-4 for a base on site, if that makes any difference. The accuracy I’m getting is on my check points after photo alignment after everything is tied together and adjusted. I’m also using Brian Christal’s Tuffwing setup, which I’m very happy with.
Hi, yes the installation of AShot is very easy.
To power your M+ AShot has 5v and 2A current.
You should not cut anything. You can plug M+ to AShot using holes in the gimbal of 4pro/adv copter.
Documentation and video are in production. Will be available soon on the AShot.cc website.
Black wire is GND
RED is +5v to M+
Green is Timemark to M+
AShot controls the DJI Camera and knows when Shoot will be done.
Thats why AShot send Timemark in the middle of the Shutter.
AShot can make shoots every 1.2 or 1.7 seconds and has no empty (lost) photos. This feature is available in Litchi app. Without AShot your DJI camera loses 2-3 photos per 100. AShot tested on 8000 of photos and did not lose photos.
AShot can be used with any software you like: Litchi, Drone Deploy, Map pilot, Pix4D etc. Your App will make photos and AShot will send Timemark to M+ in the middle of Shutter!
AShot is very easy of integration inside Ph4 pro or adv. No need soldering and cutting anything.
Maine looks pretty good for GLONASS so maybe try it @ 10hz? When you say “staying fixed” are you trying to run RTK? I get a fix in PPK before the bird gets to the first waypoint every time.
Ok, so now we see a different installation than what was advertised. This is much more acceptable. I would have to try it before I would buy it because the way you have it shown there draws power from the main board and in my experience WILL eventually lead to sensor errors. Also, not losing 1 event over 8,000 attempts sounds a bit like snake oil considering DJI has admitted it is an SDK problem and there is nothing you can do about the signal being sent from the DJI board in this configuration.
The power we use is from DJI Battery directly. There are no sensor errors.
AShot does not lose photos because it controls DJI CAN bus and does not use DJI SDK ! Thats why AShot can make photos every 1.2 and 1.7 seconds.
We use AShot 3 years. We use it when start surveying on DJI Ph3 pro.
But this year we start to sell AShot board, because we can made Timemark to M+ in the middle of Camera shutter.
With AShot board I fly 1200 - 2000 flights per year. No photo loosing!
Hi Konstantin, thanks for the reply. Is that 3 wire cable out of your board a standard type of plug? like something cheaply available if someone manages to pull a wire out?