With AShot board we will put this 3 wire cable and JST GH 5 pin connector to use it for TM and power socket of your M+ (this socket is near of GNSS antenna socket). Later I will post photos. Now we have holidays in Russia )) Women day.
To make photos every 1.2 or 1.7 seconds and dont lose them you should use Litchi App and drawing waypoints route yourself, you may using KML import in Litch app to upload waypoints.
Then you should fly to WPs and start AShot interval shooting - there is a command from your DJI remote: camera down, then camera quickly go UP, then Down. And AShot starts to make interval shooting without photos loosing. Later I wil show this procedure in video. It is very easy. And very stable interval shooting.
I don’t need fast photos, i can live with the intervals forced by Map Pilot. But not losing photos makes me take notice as I typically lose 4 or so photos on a 400 photo mission.
Map pilot uses DJI SDK, and you will lose photos (((
Sorry.
If you use mappilot, AShot will know the photo event and send TM to M+ in the middle of Shutter. 0ms latency in every photo.
But we fly in Litchi and make shots by AShot every 1.7 seconds and dont lose photos.
This is exactly what I am talking about. Being forced to fly Litchi is the caveat. Personally I like and use Litchi regularly. I apologize if I misunderstood from your !!, but this is exciting technology and must be verified by someone other than the manufacturer. I am purchasing one now and will report to the community.
Thanks @wsurvey, that’s what we do. If I can spend $1k on top of the P4P setup and save my company $10k to get the functionality then I look like a champ, but this extra $400 won’t make me a chump…
I have check our business paypal acc, it is OK. Please try again to make payment. If you have any problem again, please send me email. I will try to help you.
Sorry, but E90 camera has rolling shutter. We dont want use it for surveying.
Now we are developing AShot for Mavic 2 pro. It has rolling too, but you should fly slowly and will receive good result. After one-two months we will show our working with mav2pro.
as long as the cable is sufficiently long this will be a winner. There may be some M+ units mounted some distance from your AShot board so a good length of cable to cover all possible mounting positions would be good.
with connectors at both ends then i assume the wires will be clipped into one of the connector ends after installation and threading through the gimbal cooling holes? i don’t see any other way to do it
it is not LED problem. This is DJI CAN bus problem, but AShot can make photos itself every 1.7 seconds and dont lose photos and event marks. AShot can control CAN bus and Camera Sensor bus.
You are right.
No Photo event in Camera → no LED blinking → no TimeMark in M+
Nice, I bet the value of the parts is less than 3.80 $, Apple will be jealous. But I still wonder whether it is possible to sell enough units to cover the development costs. Anyhow, the market seems big enough to attract DJI to develop their own Phantom RTK.
I find it really interesting that so many people go for a Phantom and that there are so many semi-commercial solutions which somehow merge Reach and Phantom. I get the impression that all these solutions somehow modify the Phantom, all these solutions are a workaround and that these modifications are a potential source of trouble in case of an incident.
@wsurvey, I think you are experiencing the same thing that many of us have seen in mapping. It has to be after the last firmware update because I had no issues with the P3P or the P4P up until about 6 months ago. I probably miss 5 on 300 so it’s workable, but it sucks when those misses hit a crucial area.
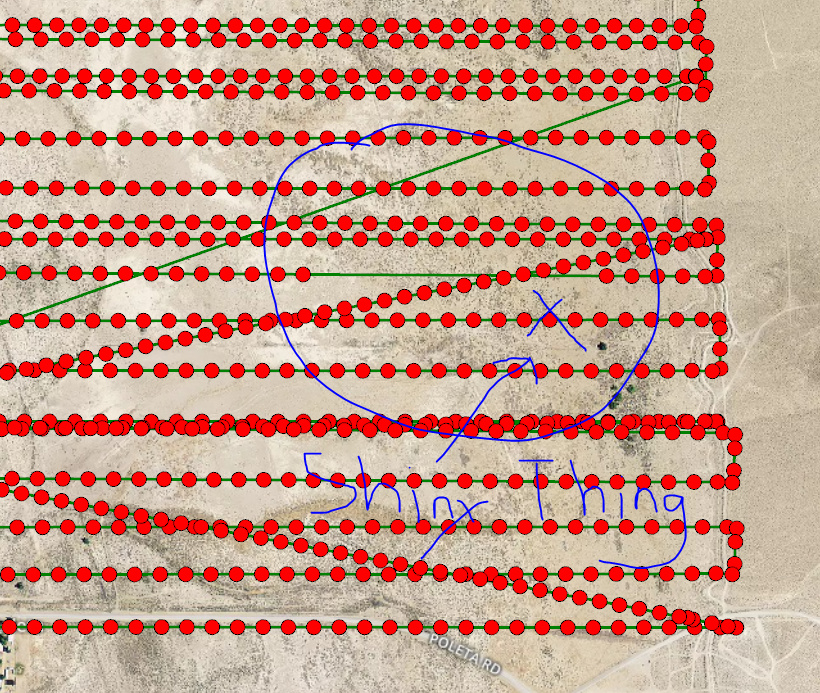
I missed some photos before. I thought it was the metallic shiny thing circling around my bird. Must have been the same thing that dropped the other P4P out of the sky shortly after…
Honestly, you spacing looks awesome so I can recommend post-processing you images to regain information from tose shadow/blown-out areas. What happened here? Obviously a good thing because of the coverage, just curious.
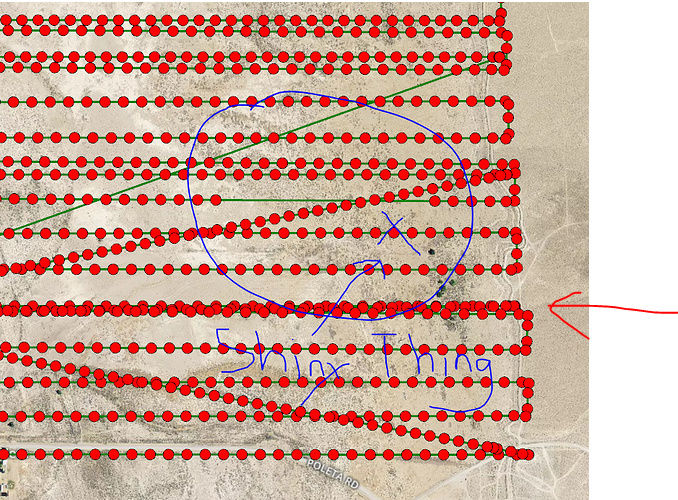
Yes indeed, cool project. The elevation overlay in DroneDeploy would be very handy in this case for drainage analysis. My problem with the skipped images is not so much the orthomosaic, but the missing data in the point cloud.
Do you utilize the point cloud and have seen gaps?
hijack
hey Tobias, I’ve decided to go full lever arm correction with the IMU data on our P4P now. I’m glad i’ve seen you mention it a few times as i don’t think i’d have bothered. I saw about 20% reduction in camera station position residuals just over my old, simple correction when I implemented a rigorous calculation. it also shifted the timing offset by more than I expected (~10ms). no more ignoring the valuable IMU data. /hijack
buying and flying a P4P is really simple, and you’re average joe can be mapping in no time flat with it and something like Pix4D. in the case of our company it’s inertia, familiarity and time cost which will likely prevent us going custom build. and i don’t think the boss will make time for me to build and test a custom platform. As for my M+ experiment it was just a thought one day that i could maybe hook it up and improve our accuracy and time with little investment. improve the time versus what i was already doing which was tracking the P4 with a total station (which i don’t think anyone else was doing). And that was an attempt to better the normal many-ground-targets way of doing things.
going custom will perhaps disrupt too much the comfort the other staff have when they all know how to fly with P4P. but it’s not impossible.