I’ve a Navio2 with Raspberry Pi 3 system running and connected to APM Planner. Taranis is connected with X8R receiver. I will need to reconfigure some things (TX/RX, telemetry) but overall I I think got the software part of it going.
Getting “PreArm: RC not calibrated” but I think I can figure it out. Doing a lot of reading
I’m trying to complete the project using Super-H 600 frame. I’m gathering that it’s going to be heavy and slow but as a beginner I think I like slow better. I plan to use it even without any gimbal or FPV capability at first and just learn to fly LOS. But with time I would like to extend it with FPV and, if possible, a separate camera for aerial photo/video. Seems like this frame should definitely handle the former but not sure about the latter. Please advise.
One of the potential improvements, as I see it, could be possibility to get longer arms and even to upgrade them to an X8 configuration.
The more I learn about it the more overwhelmed I get and maybe I’m in over my head but I already invested in this project so I intend to see it at least thru the first crash
This is what I’m coming up with for that Super-H 600…
HK Pilot Power VI Module, Distribution Board And Dual UBEC ALL-In-One (120A and 10s)
with Afro ESC 30Amp OPTO Multi-rotor Motor Speed Controller (SimonK Firmware)
My understanding is that the PM/PDB takes care of BECs to servo ports. The BEC (6-pin) to Navio will provide the power and sensors. Or do I need a separate power to the radio?
Trying to pick the motors, propellers and batteries. Something like 4108-600KV Turnigy Multistar 22 Pole Brushless Multi-Rotor Motor With Extra Long Leads with 12x4.5 or 12x3.8 props.
eCalc showed 20min of flight time with 2000g Model Weight on a Turnigy Bolt 5000mAh 4S.
Cool frame with what seems to be an ample room to mount RPi/Navio. Unfortunately out of stock everywhere… except Hoverthings itself… taking another look.
Main reason I’m going with Super-H 600 is that I’m hoping the clean section has enough room to mount RPi/Navio. I’m still unclear how to secure RPi/Navio to the frame. As I mentioned, this is the first ever UAV I’m building. Hoping using the frame with clean-and-dirty vibration insulation will allow me not to worry about vibration.
I wouldn’t mind a smaller frame as it will also allow me to save some dough on motors/ESCs/props. Like Dart 450 FPV from HK. But it’s for flight controllers with 30-45mm mounting distance. I should probably be able to mount RPi/Navio on top.
I didn’t want to start a topic on what frames are better to mount RPi/Navio tho maybe it’s not such a bad idea for such a big controller.
A lot comes down to how much experience you have with mulirotors. A far as mounting your controller the printed anti-vibration mount that is list here on the site works great.
I was not meaning the Flip Sport was breakable. I also use and love the Hoverthing stuff.i’m just one of them type that like to have back up parts for stuff I’v put lots of time in.
I saw this mount but I don’t have a 3D printer. Researching 3D printing services nearby but… uneasy about this design as I don’t have any experience with multirotors. That’s why I like the clean-and-dirty setups.
Another thing I wanted to ask down the line when I’m close to finalizing the design of my project is what small parts (nuts and bolts and whatnot) should I get. I’m that inexperienced.
Got all the parts I mentioned above in my Shopping cart at HK and ready to go for it. Waiting mostly for the community to chime in with comments.
for 3d printing services look into 3dhub They help you find a local printing shop or one that will do it for you. All you have to do is up load the stl file to them. Check them out
You will get there…research research research fail fail fail research some more just keep learning you are jumping into one of the hardest parts of this hobby. So many things associated with drones.
Was hoping to start for cheap and come up with an extendable design but the parts I outlined above come up to $400. Granted they’re not the cheapest parts but that makes me even more cautious.
Afro ESC 30Amp OPTO Multi-rotor Motor Speed Controller (SimonK Firmware)
ZIPPY Compact 5000mAh 4S 25C
I’m also getting Turnigy 5A (8-40v) SBEC. It is my understanding that, since the ESCs do not have the BECs and the PDB above seems to only have the 5V connector for the POWER port on the Navio2, I have to use one to power the radio. Please confirm.
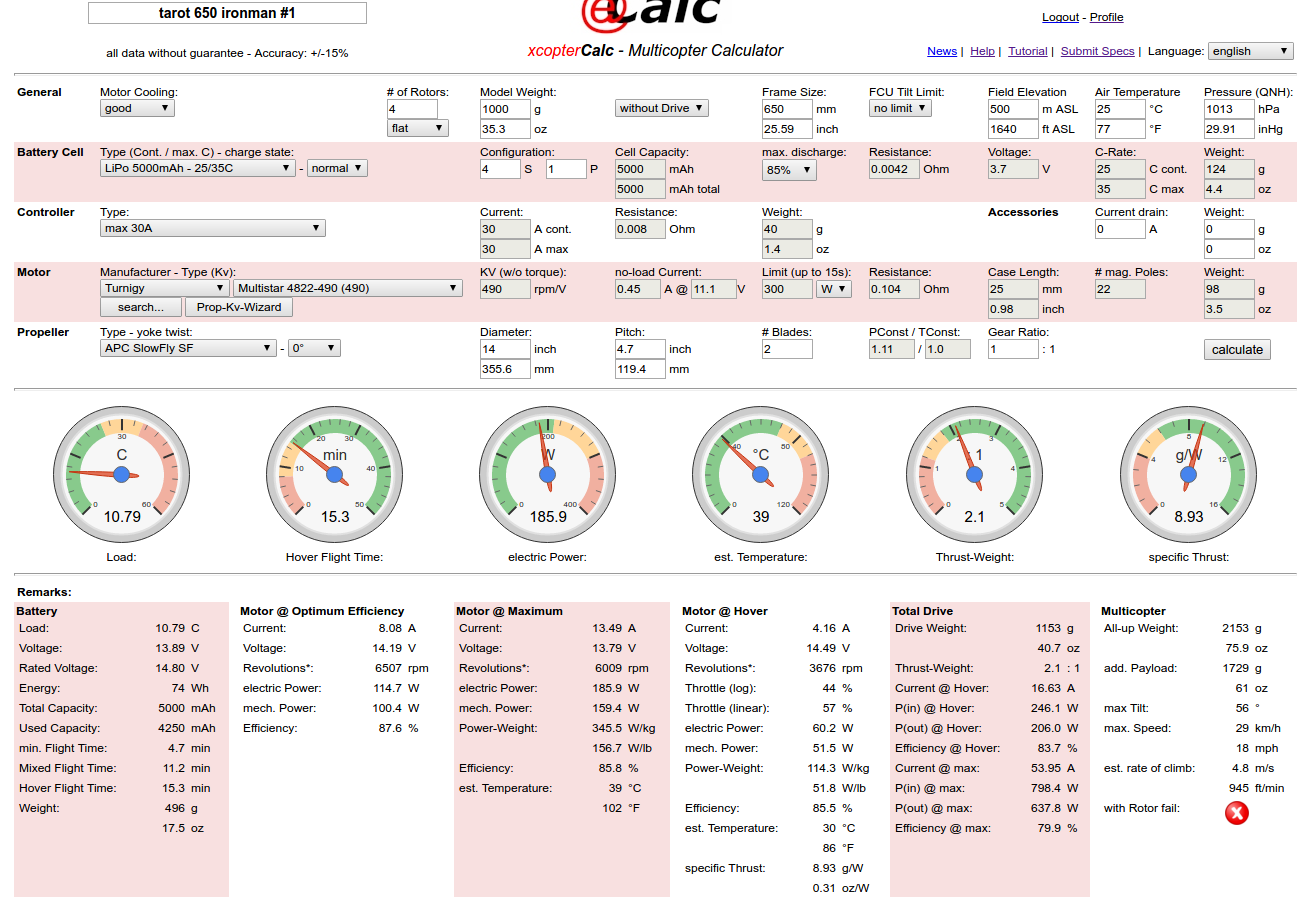
eCalc gives me some good results with Slow Flier 14x4.7 propellers.






 You will get there…research research research fail fail fail research some more just keep learning you are jumping into one of the hardest parts of this hobby. So many things associated with drones.
You will get there…research research research fail fail fail research some more just keep learning you are jumping into one of the hardest parts of this hobby. So many things associated with drones.