i have a cube orange flight controller setted as arducopter, remote controller i´m using the here link.
Aditionally i´m using the telemetry this module on my orange cube FC:
In the installation guide, is described that it´s possible to use the telemetry radio as a carrier for RTK corrections. Is that necessary? What is the sense for this?
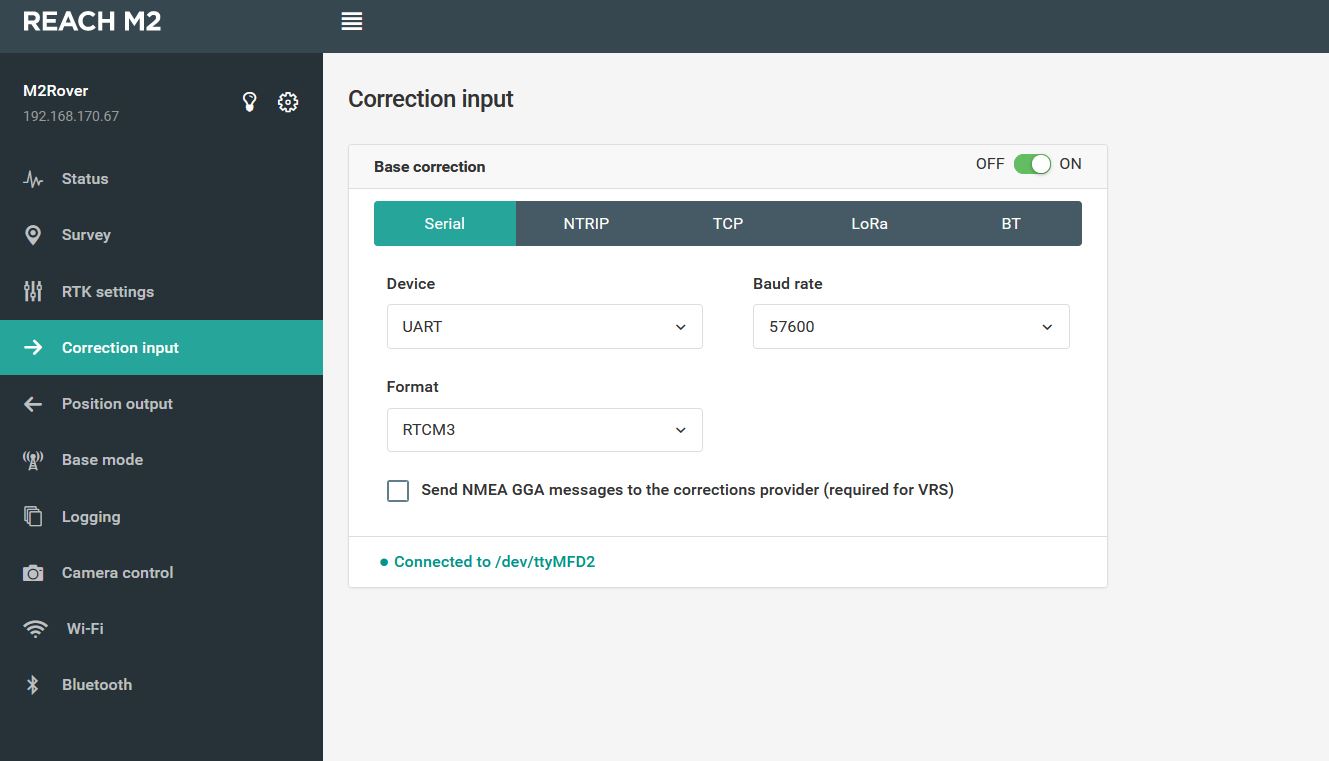
I have a reach M2 module as rover and a Reach RS2 as base, connected with EMLID Lora Radio. https://docs.emlid.com/reachm2/ardupilot-integration/#setting-up-a-correction-link
i´ve tried to set this, but this menue is not active?
In the EMLID documentation, does it say that MAVLINK communications has to be switched off first?
But where do you have to do that in the Mission Planner menu?
And if you do that, does the previous telemetry module no longer work?
Do you have to reactivate MAVLINK communication then?
How i must proceed?
This option is usually used for optimizing the number of connected devices. It’s easier to supply the Reach M2 module with corrections via the UART connection to the autopilot. This way, you don’t need to use additional modules to receive corrections.
You don’t need to use the LoRa radio for receiving or transferring corrections if you’re planning to embed the corrections in the telemetry link.
You’ll need to connect only telemetry radio to the GCS. MAVLink connection to autopilot should be disabled otherwise it won’t be possible to change radio settings.
May I ask you if you have loaded the radio settings prior as described in the guide? Have you disconnected the telemetry from the autopilot prior to the configuration?
You mean, i can unmount the LoRa communication module?
The RTK communication between Reach RS 2 Base and Reach M2 Rover (in my copter) can communicate trough my installed RFD Long Range Telemetry module completely, without LoRa?
Can i completely remove the Lora module from the copter?
Since i´ve intrerupt the communication with the Lora module, i didn´t see any signals from the reach RS2 in the state of the rover M2.
If you’re planning to embed the corrections into the telemetry link, there is no need to add or use LoRa radio module. The autopilot should transfer the corrections to the receiver via the Serial connection.
Yes, you can.
Yes, the main idea is that the base sends corrections to the GCS which transfers them to the autopilot via a telemetry link. This helps reduce the number of hardware components introduced to the drone.
If you’re planning to send the corrections via the telemetry link, there is no need to use the LoRa module.
May I ask you if you have successfully configured the correction link between the base and GCS?
[quote=“polina.buriak, post:5, topic:20235, full:true”]
Hi Fred,
If you’re planning to embed the corrections into the telemetry link, there is no need to add or use LoRa radio module. The autopilot should transfer the corrections to the receiver via the Serial connection.
Yes, you can.
but if i didn´t use Mission Planner? i wanna use instead UGCS as autonomy software?
Yes, the main idea is that the base sends corrections to the GCS which transfers them to the autopilot via a telemetry link. This helps reduce the number of hardware components introduced to the drone.
What do you mean exactly with GCS? Mission Planner?
If you’re planning to send the corrections via the telemetry link, there is no need to use the LoRa module.
May I ask you if you have successfully configured the correction link between the base and GCS?
[/quote]
you mean if i get GPS injection into the mission planner? Yes i get signals.
The functionality of embedding the telemetry radio as a carrier for RTK corrections is available in the Mission planner only. If you’re using another configuration software, you won’t be able to use this feature.
Yes, I mean the Ground Control Station, probably laptop with a running Mission Planner.
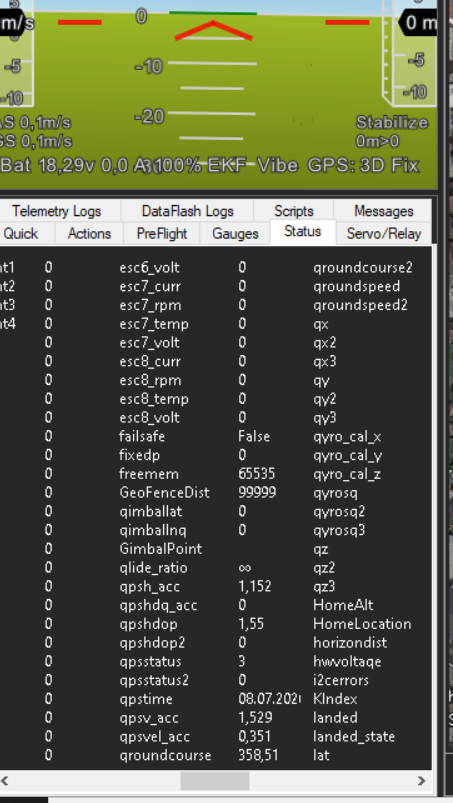
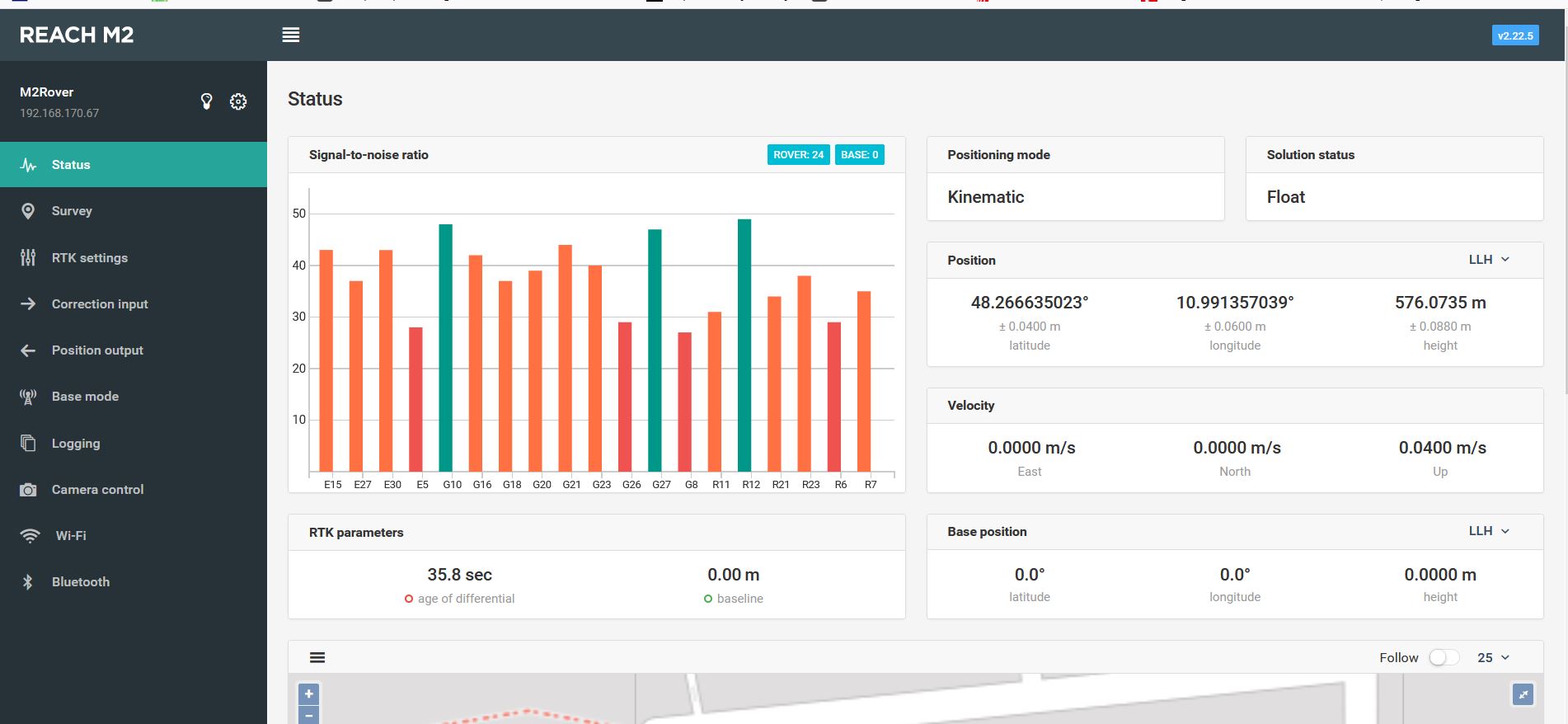
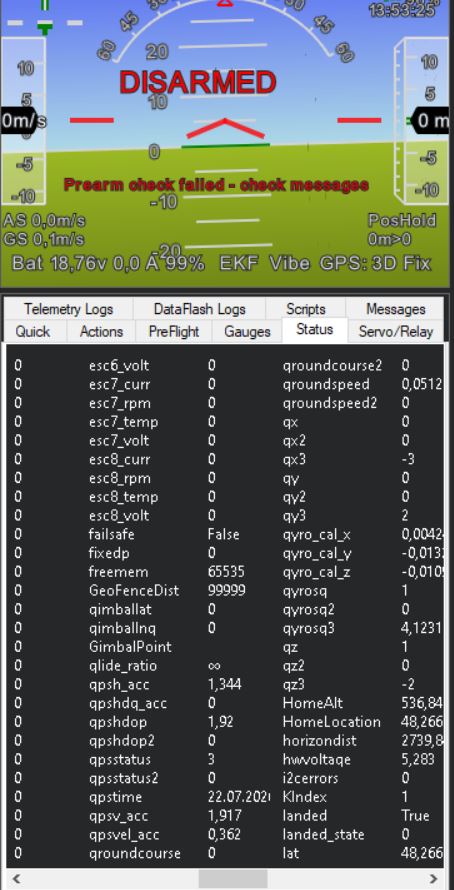
Yes, that’s what I meant. Could you please share the screenshot of the Status tab of the Reach M2? It’ll help us check if Reach can send the corrected solution to autopilot.
[quote=“polina.buriak, post:7, topic:20235, full:true”]
Hi Fred,
The functionality of embedding the telemetry radio as a carrier for RTK corrections is available in the Mission planner only. If you’re using another configuration software, you won’t be able to use this feature.
Yes, I mean the Ground Control Station, probably laptop with a running Mission Planner.
Yes, that's what I meant. Could you please share the screenshot of the Status tab of the Reach M2? It'll help us check if Reach can send the corrected solution to autopilot.
[/quote]
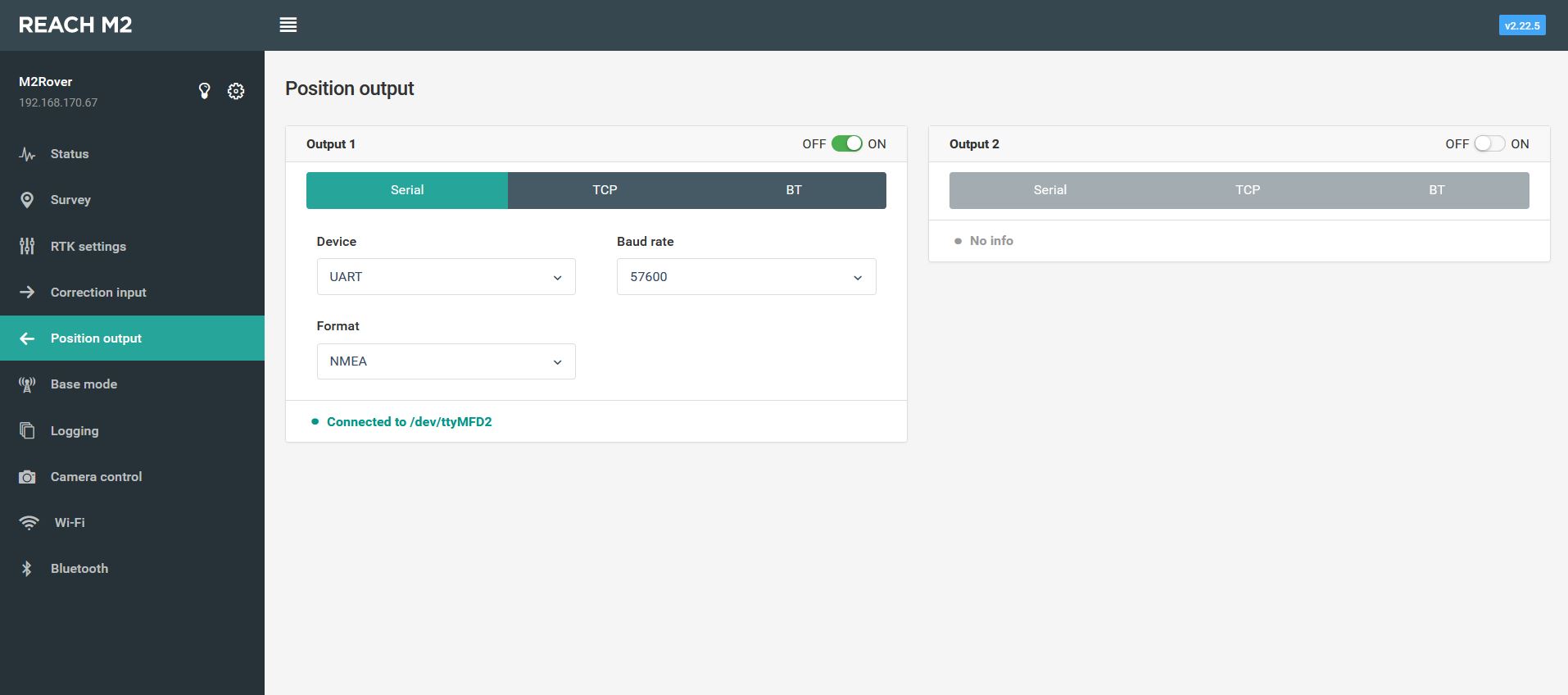
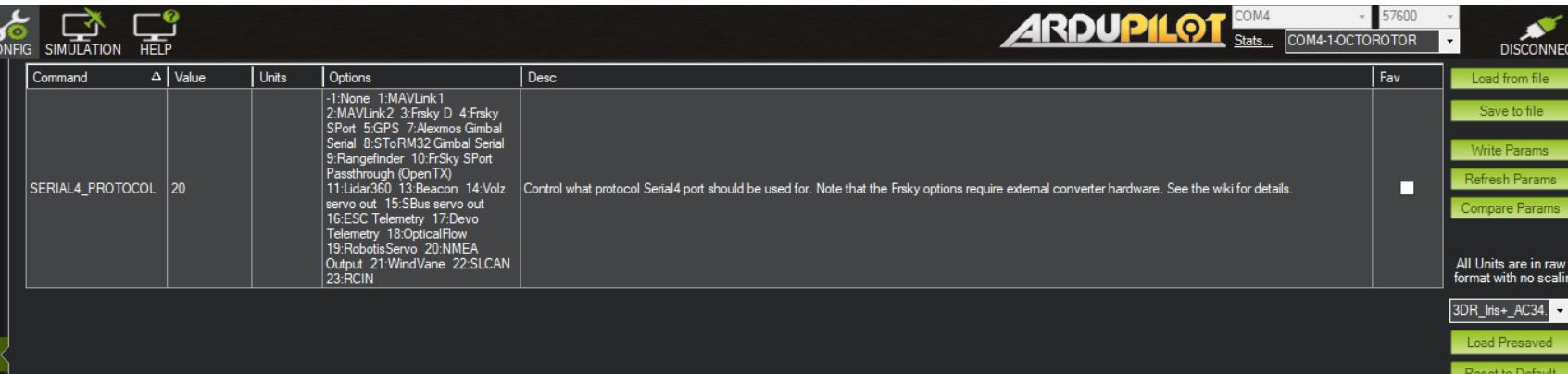
Reach M2 should be connected to the GPS2 port. The parameters in Mission Planner should be set to the following:
SERIAL4_PROTOCOL = 20 (NMEA Output)
SERIALL4_BAUD = 38 (the baud rate set up in RV)
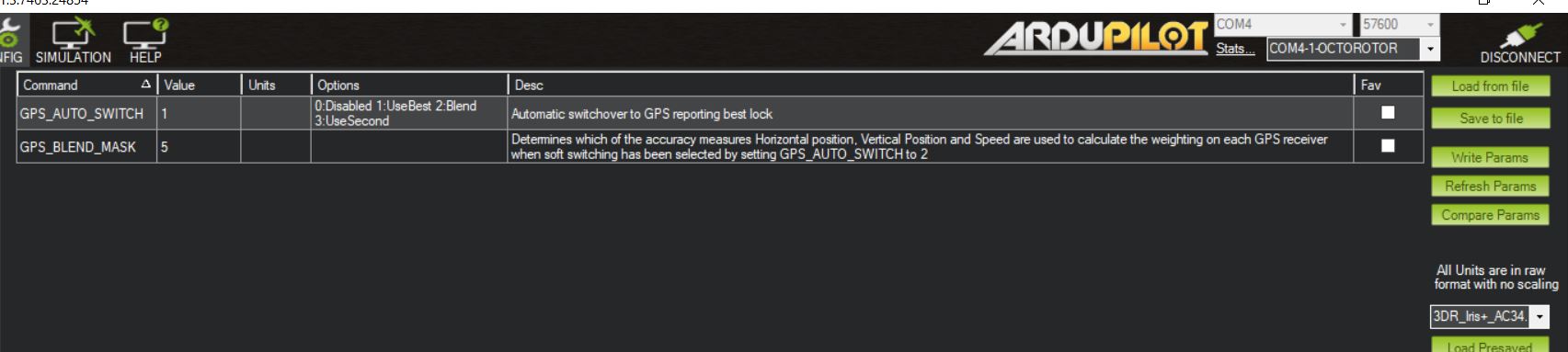
GPS_AUTO_SWITCH = 1
GPS_TYPE2 = 5 (NMEA)
GPS_INJECT_TO = 1
Could you please specify what is the Solution status of the receiver during the tests? Could you please share the screenshot of the Status tab of the ReachView app?
Hello,
can you please show me a picture of the connection cable between Pixhawk 2 and the EMLID Reach M2 module? Or an connection diagram?
Tomorrow i will retry and i will post you all the screenshots to search the reason of the failure.
I’m afraid we don’t have an exact picture of the setup. However, there should be no issues with the integration. We have a special cable for integration with Pixhawk 2.1. You can use this scheme as a reference. Pixhawk Cube ports’ pinout is available in this overview.
Please test your setup without enabling the RTK inject function. Also, I’d ask you to make sure in the ReachView app that the receiver has a good satellite reception is capable of providing at least Single solution stably.
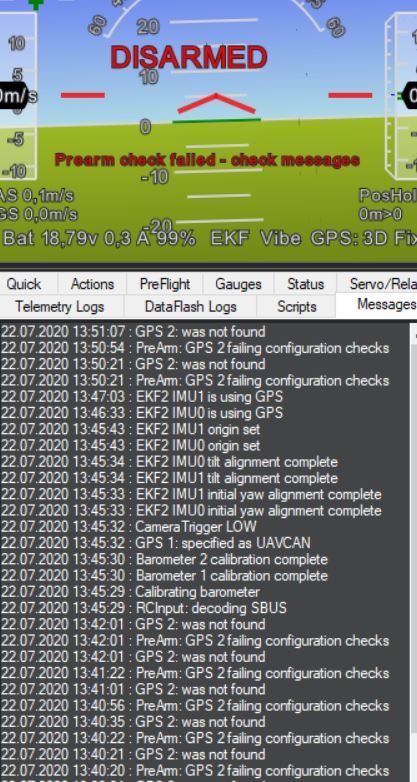
I can see there are no corrections coming to the Reach M2 as well as no position is transmitted to the autopilot. It seems like there is indeed an issue with the wiring of the ports.
We’ll try to reproduce your issues to check what could be changed with the setup. We’ll reach out as soon as there’s news. We’re still working remotely so gathering all of the required equipment might take time.
I have connected a separate power source to pin 5 V and ground. The Reach M2 module also starts and can also be accessed with Reachview.
In addition, I also tested the original connection cable from EMLID, also the same result, no GPS signal on the GPS2 port from Pixhawk.
But I get GPS injection signal in.
If you wish, i can send you Mission Planner settings file.
Thank you very much.
Do I understand correctly that if you are powering an M2 separately your Orange Cube does receive corrections?
It seems, that Pixhawk cannot provide enough power to M2 via a GPS2 port. In that case, I would recommend powering Reach M2 separately using a micro-USB cable or by connecting 5V and GND pins to a separate power supply as you did.
i´m using a separate power supply with an micro USB connector on the side of the M2 module.
The module is working and the injections too.
Please send me all needed Mission Planner parameters for the pixhawk cube orange and the needed parameters/settings for the M2 module
I´m trying since weeks without any results.
And i´m wondering why EMLID doesn´t publish connecting specifications in the docs for the reach M2 module?