Hey Fred,
Can you, please, take a picture of your Orange Cube connected to the M2?
Hey Fred,
Can you, please, take a picture of your Orange Cube connected to the M2?
Hello,
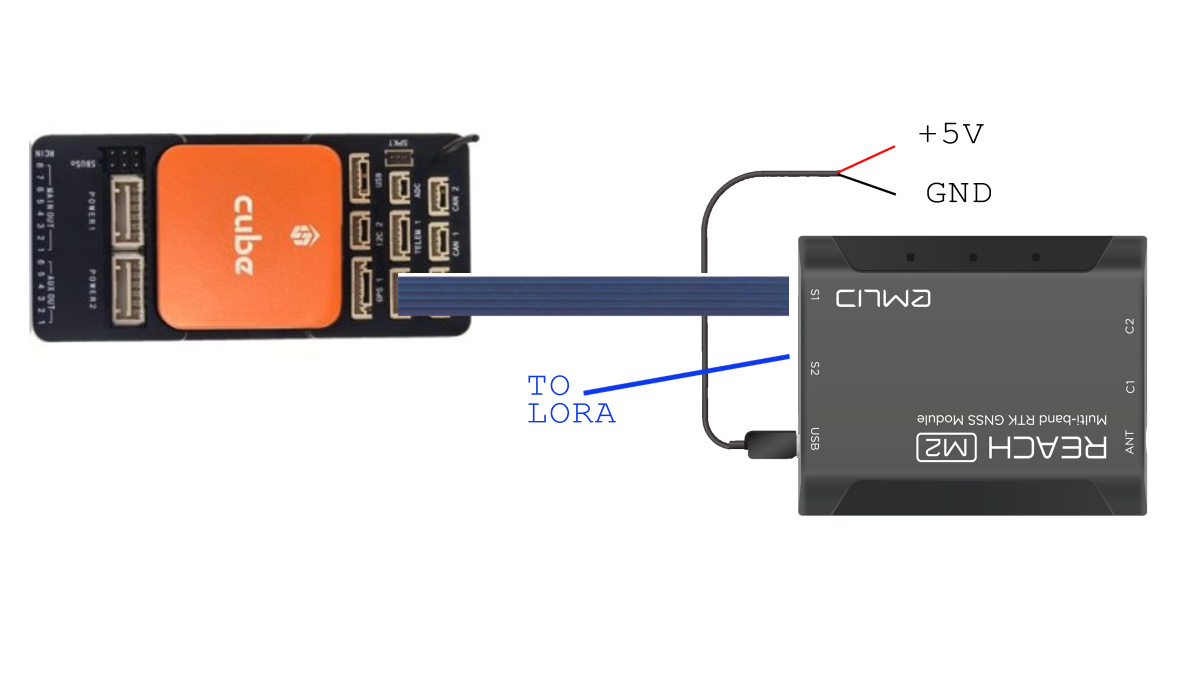
as i mentioned in the past, i have connected it with this cable, but without the red wire, this wire i have removed this is the +5V power pin. The power 5V cames from a stabilized module direct on the micro USB plug on the side of the M2 module.
Same issue here and havent found any solution on this “support” forum. Have you managed to make it work?
Same here, I just purchased a set of Emlid M2 and RS2. Follow every single step, in this thread and I get the same error. GPS 2 failing configurations check.
I can see corrections in mission planner, I tried not using corrections. I have tried changing the output to ERB in both mission planner and the M2 (failed)
I just can’t get to make mission planner to recognize the M2.
frustrating and we have to do a job next week.
If I can work with you guys on getting this to work please let me know what else I can provide. LOGS, DETAILED PICTURES, PARAMETER FILES.
Anything to make this work.
Thanks
how do have connected the first GPS?
Trough UAV CAN or with serial?
I had connected my first GPS (Here 2 Antenna) at the beginning with the UAV CAN Bus and i doesn´t works.
After that i had changed the parameters and the antenna cable connected via serial (I2C) and than it works.
It seems that the Cube cannot handle two different types of connection.
Both connection setted to serial and i got two signals from GPS 1 and GPS2
GPS_TYPE2 = 5 (NMEA) wrong
GPS_TYPE2 = GPS - OK
Good luck!
how do have connected the first GPS?
Trough UAV CAN or with serial?
I had connected my first GPS (Here 2 Antenna) at the beginning with the UAV CAN Bus and i doesn´t works.
After that i had changed the parameters and the antenna cable connected via serial (I2C) and than it works.
It seems that the Cube cannot handle two different types of connection.
Both connection setted to serial and i got two signals from GPS 1 and GPS2
GPS_TYPE2 = 5 (NMEA) wrong
GPS_TYPE2 = GPS - OK
Good luck!
Thanks for pointing this out, I will give it a try and will confirm if it worked for me.
Checked and Passed so far 
@rcdevil Thanks again to point that connection issue. I was lazy about making that change, but it does makes sense.
If you are using the HERE2 GPS Unit you MUST use (i2c). If you are connected with UAVCAN you pixhawk will not recognize the M2 as you second GPS unit.
Configuration that worked for me.
Reach M2:
Only used to wires from port S1to pixhawk port GPS 2 (pin 5 RX to pin 2 TX, pin 4 TX to pin 3 RX)
And power M2 from the same port S1 pins 6 (5v) and 1 (Gnd) to the servo rail in the pixhawk. (any available, assuming you are using a 5v BEC to power up your servos).
Correction Input
DEVICE: UART
BAUD RATE: 38400
FORMAT: RTCM3
Position Output
DEVICE: UART
BAUD RATE: 38400
FORMAT: ERB
Pixhawk Params:
GPS_AUTO_CONFIG=1
GPS_AUTO_SWITCH=1
GPS_INJECT_TO=1
GPS_TYPE=1
GPS2_TYPE=13 (ERB)
SERIAL4_BAUD=38
SERIAL_OPTIONS=0
SERIAL_PROTOCOL=5 (GPS)
Save params, reboot pixhawk and it will auto detect GPS 2 as RTK float
Hey there,
Thank you all for the valuable suggestions!
We have conducted the tests, so below are the settings that need to be applied for Reach M2 and Pixhawk Orange Cube configuration. They change regarding the Pixhawk Orange Cube’s port and M2’s output format you are using for the connection:
SERIAL3_BAUD or SERIAL4_BAUD must be set equal to the receiver’s position output baud.
NMEA baud should be equal to the baud of PC-Pixhawk connection or greater.
To send the raw data MAVLink packets to specified GPSes:
We’ll think about how we can add all of this information to our guide.