



@kseniia.suzdaltseva I have sent all log you were asked 2days ago .please reply on this issues.
Hi @Kalai_Selvan,
Thanks, I received the logs. I’ll need a bit more time to look into them. I’ll reach out to you with the results.
1 Like
did you received two mails with both of attached log file.
@PotatoFarmer @polino.buriak
Please help me any one here to come out of the issue?
Hi @Kalai_Selvan,
I received both emails with logs provided. I’ll get back to you with the results soon.
Help me out quickly as soon as possible.
Long due struggling with issue.
Where can I edit reach RS2 and M2 hotspot password?
In app I can edit only SSID name .
You can edit the Reach hotspot password in the ReachView 3 Wi-Fi tab.
If I click edit on the pagebit allow me to change tha Hotspot SSID name only not the password.
To change the hotspot password, please tap on Edit in the Wi-Fi Hotspot section. If you face difficulties with it, please share the screenshot of your ReachView 3 Wi-Fi tab.
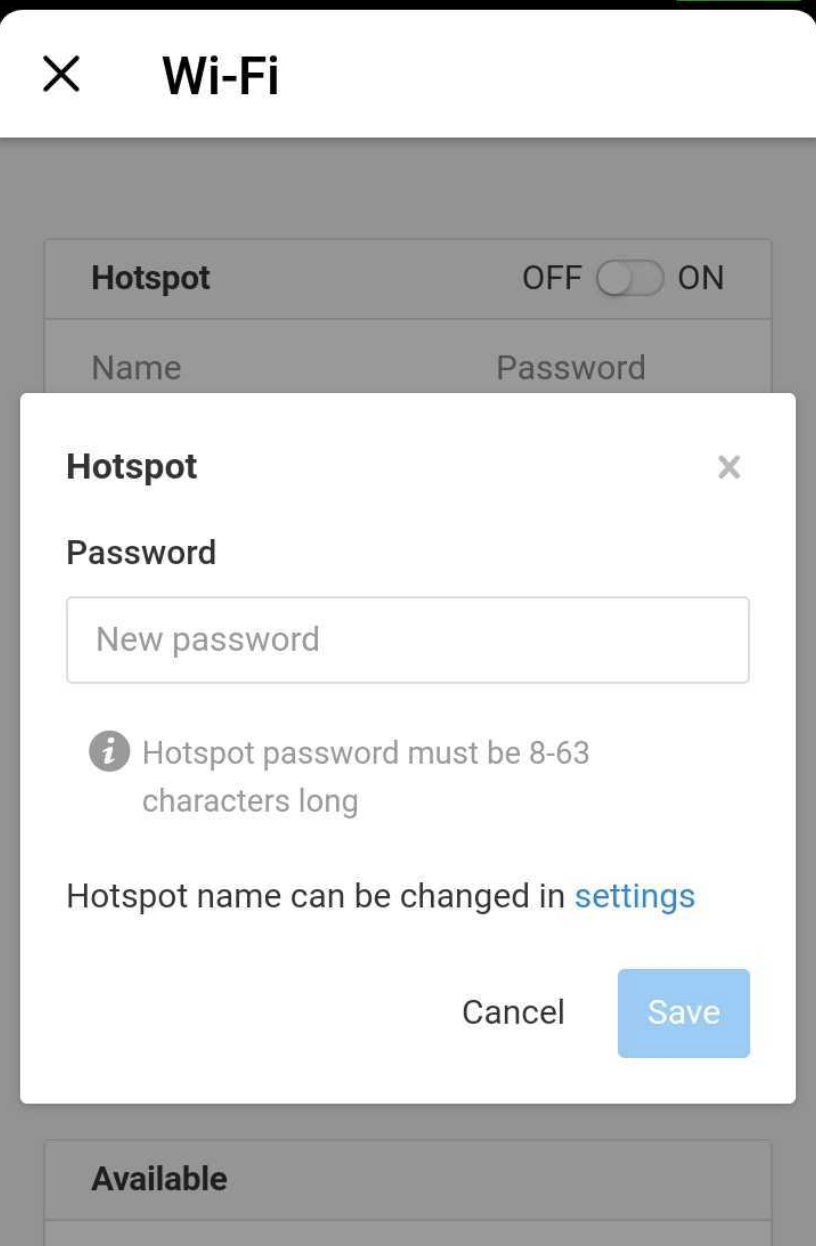
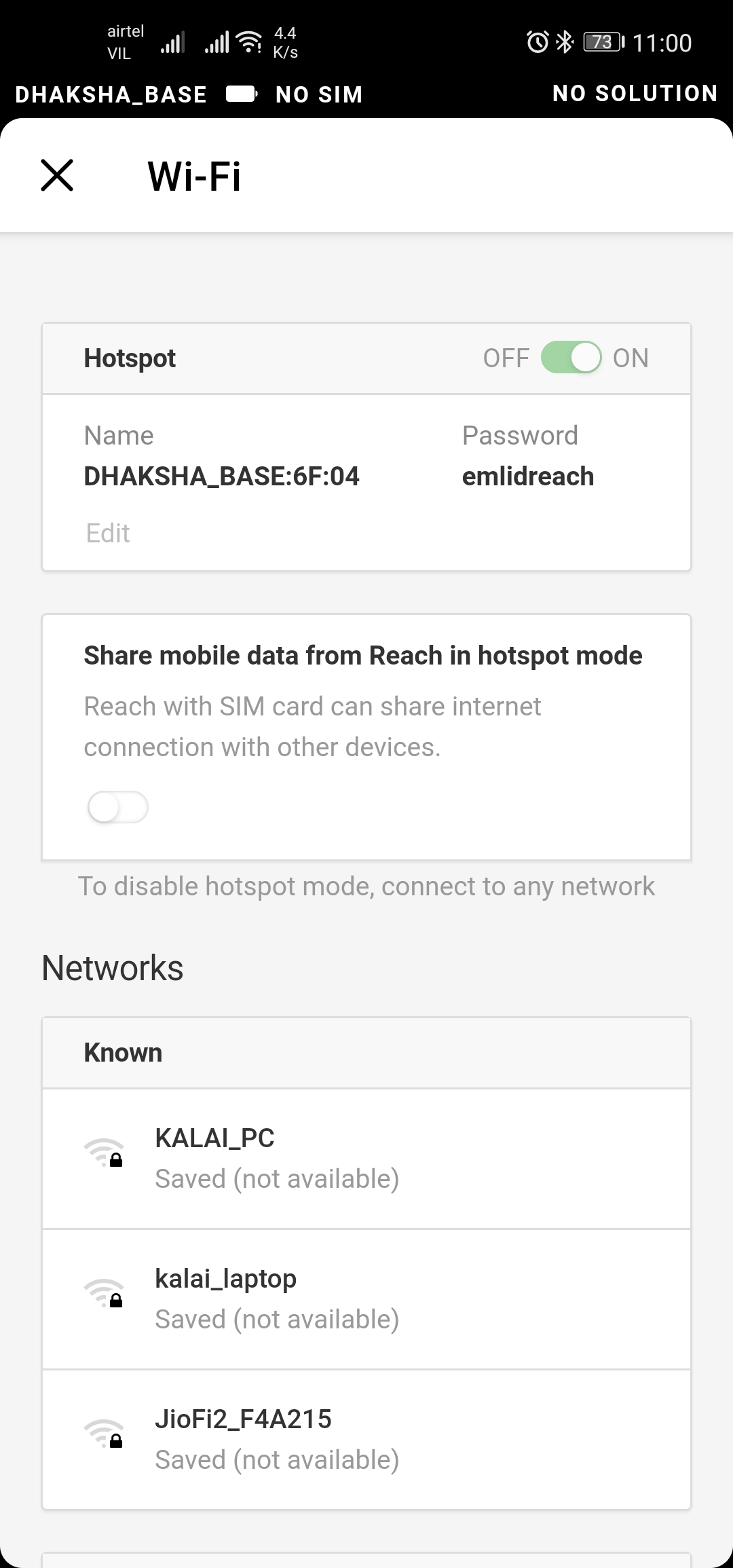
As I see, your receiver is in the hotspot mode now. It’s possible to change the hotspot password only when Reach is connected to an external Wi-Fi network. You may connect your receiver and the mobile device to one of the Wi-Fi networks listed and check if it helps.
1 Like
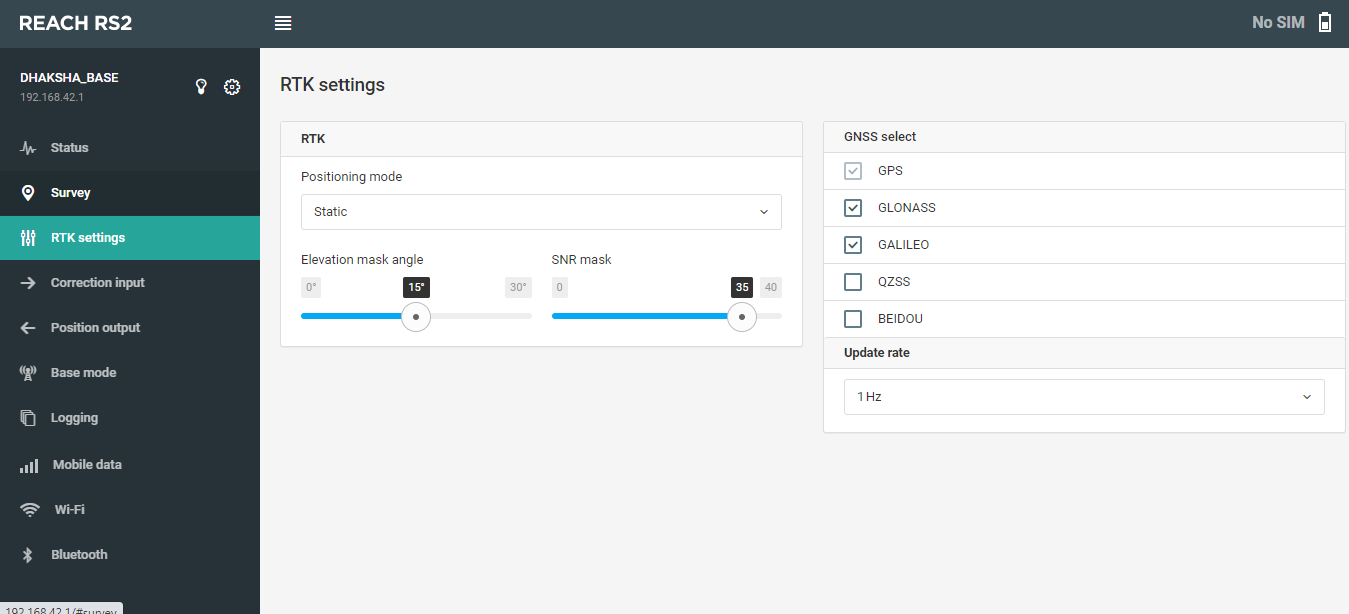
I’ve checked the raw data logs that you provided. As I can see, the data collected on the base and rover is fine. However, there are 10s gaps in the base correction logs:
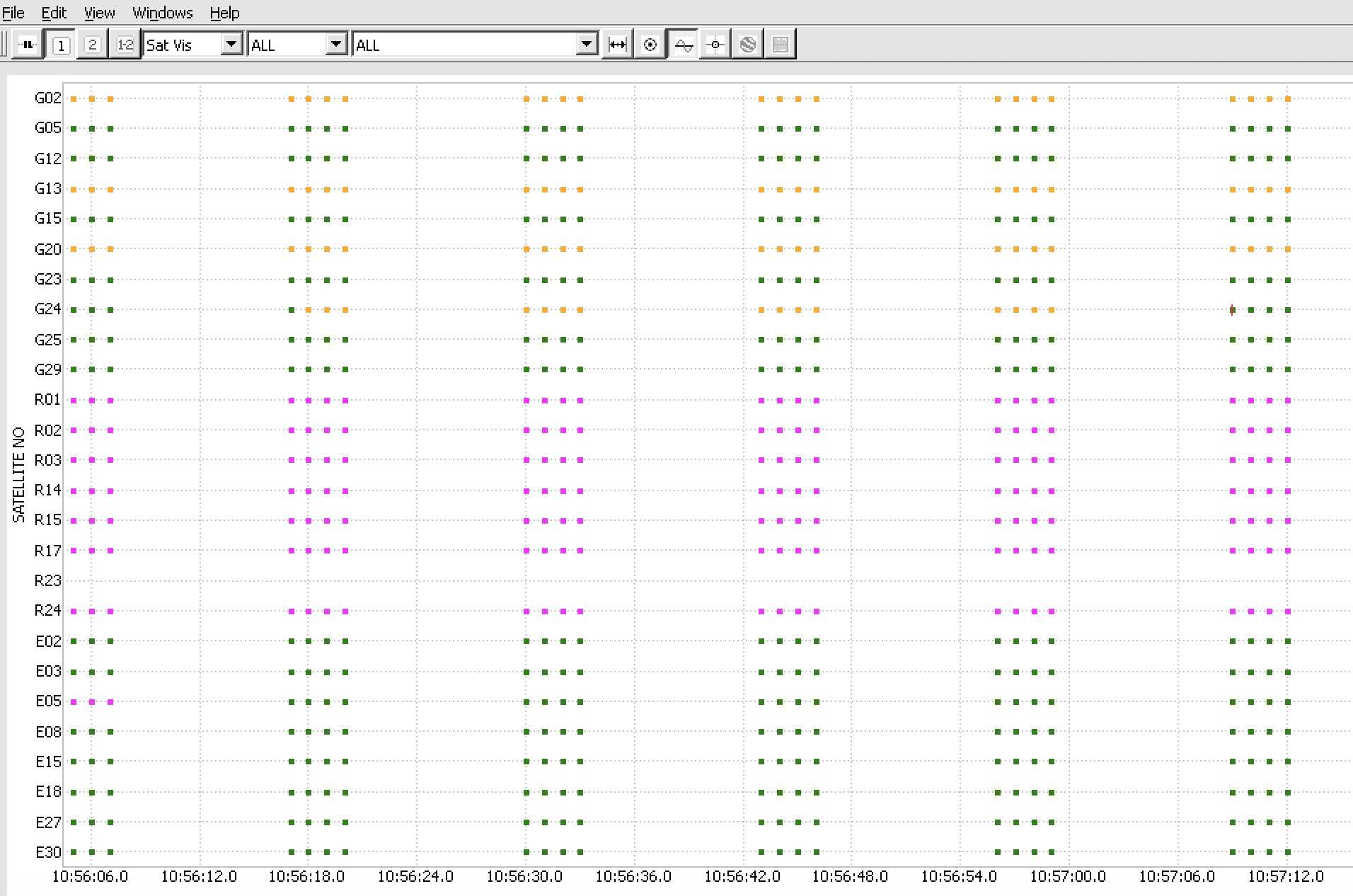
When you disabled QZSS and Beidou, there were no gaps in the RTCM3 log. From the description you provided, it looks like the age of differential was up to 1s in this test.
It seems that your radio can’t transmit such an amount of information and loses some of the RTCM3 packages. I’d suggest checking if disabling some GNSS systems or RTCM3 messages may help to resolve the issue. The minimum set of RTCM3 messages that should be transmitted consists of 1006 (ARP station coordinate) and 1074 (GPS observables) messages.
To see if the issue may be related to the receivers’ performance, please connect Reach RS2 and Reach M2 directly via LoRa or NTRIP and check the age of differential.
2 Likes
As I I already told that I have sent two emil with consist of 2set of log which two different results.
1st one is all GNSS selected and taken log for 20min on both rs2 and M2,with out reboot I have disabled QZSS and beidou and continued same test for 20min.after disabled QZSS and beidou rtk fixed working fine.
Then rebooted both unit without not changed any setting,but next reboot it was created same problem …please look at that properly.with 3 GNSS select also it didn’t worked. I had attached those log also please check your mail.
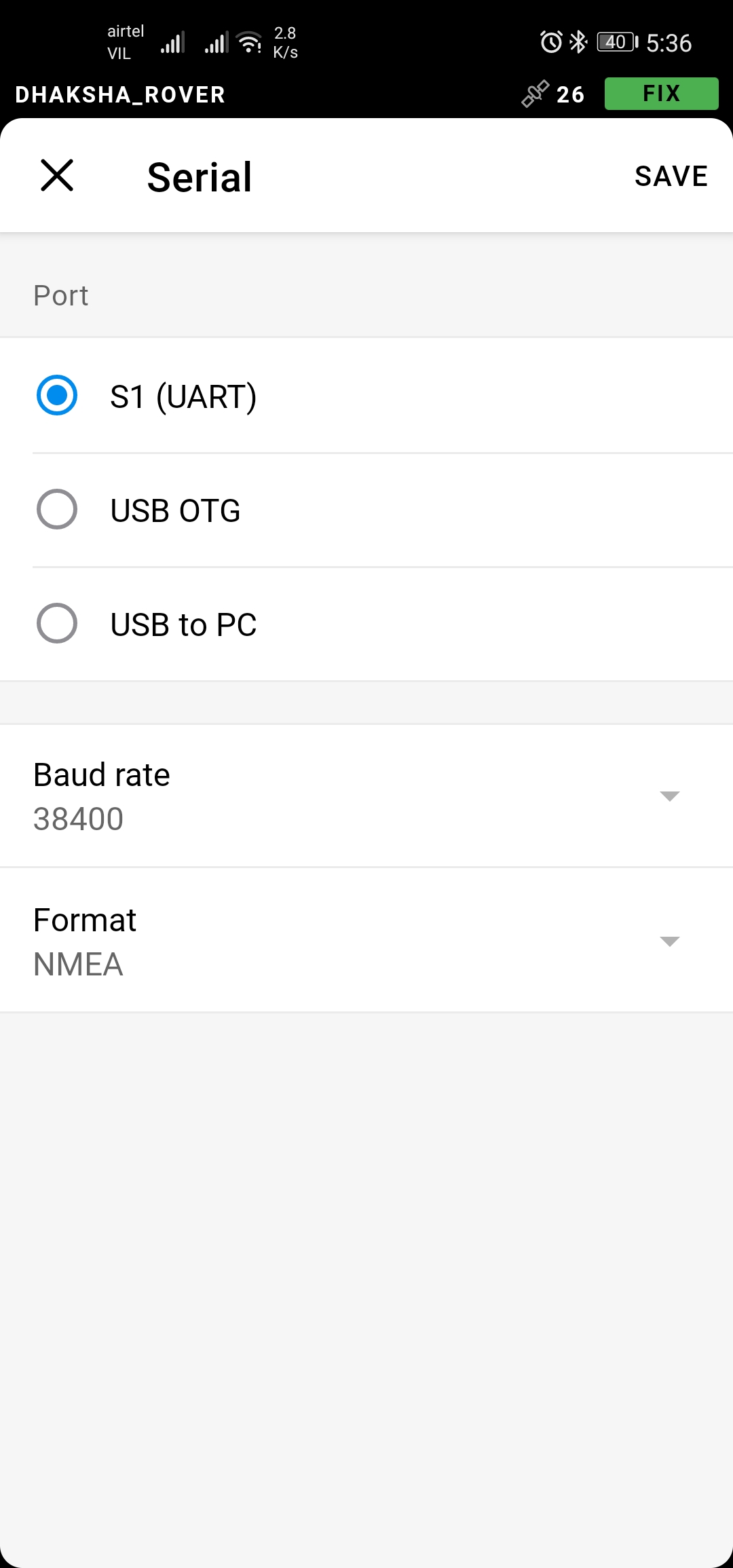
I am using RFD900x data radio which very familiar for ardupilot .as suggested by emlid manual I have set every parameters for radio I was done very very carefully .so no doubt about the radio.
What would be the postion streaming NEMA messages refresh or update rates in M2?
Default value is 1hz for all messages .
I will let try this tomorrow.
Sent M2 full system reports also to be check while its most of the time it’s keep disconnecting to reach view3 and getting over heat as mentioned already in threads and email also?
today i have conducted you suggestion but result could not improve.
i was unchecked GNSS and RTCM message Beidou 1124 and 1094 but below screen shot only taken at Beidou disabled only.
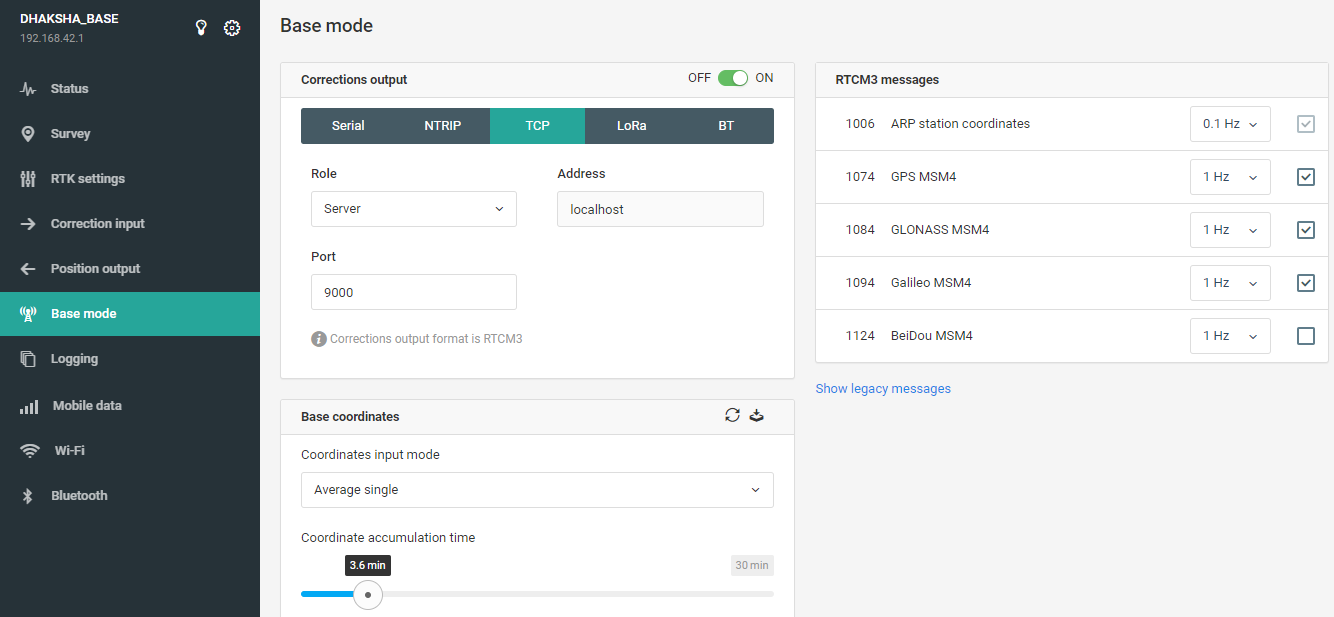
with above setting rtk fixed ,but mission planner keep says that unhealthy gps signal .
in loiter mode gives lot of drift and not holding the position and whenever change to reach M2 gps its says unhealthy gps signal and start drifting.
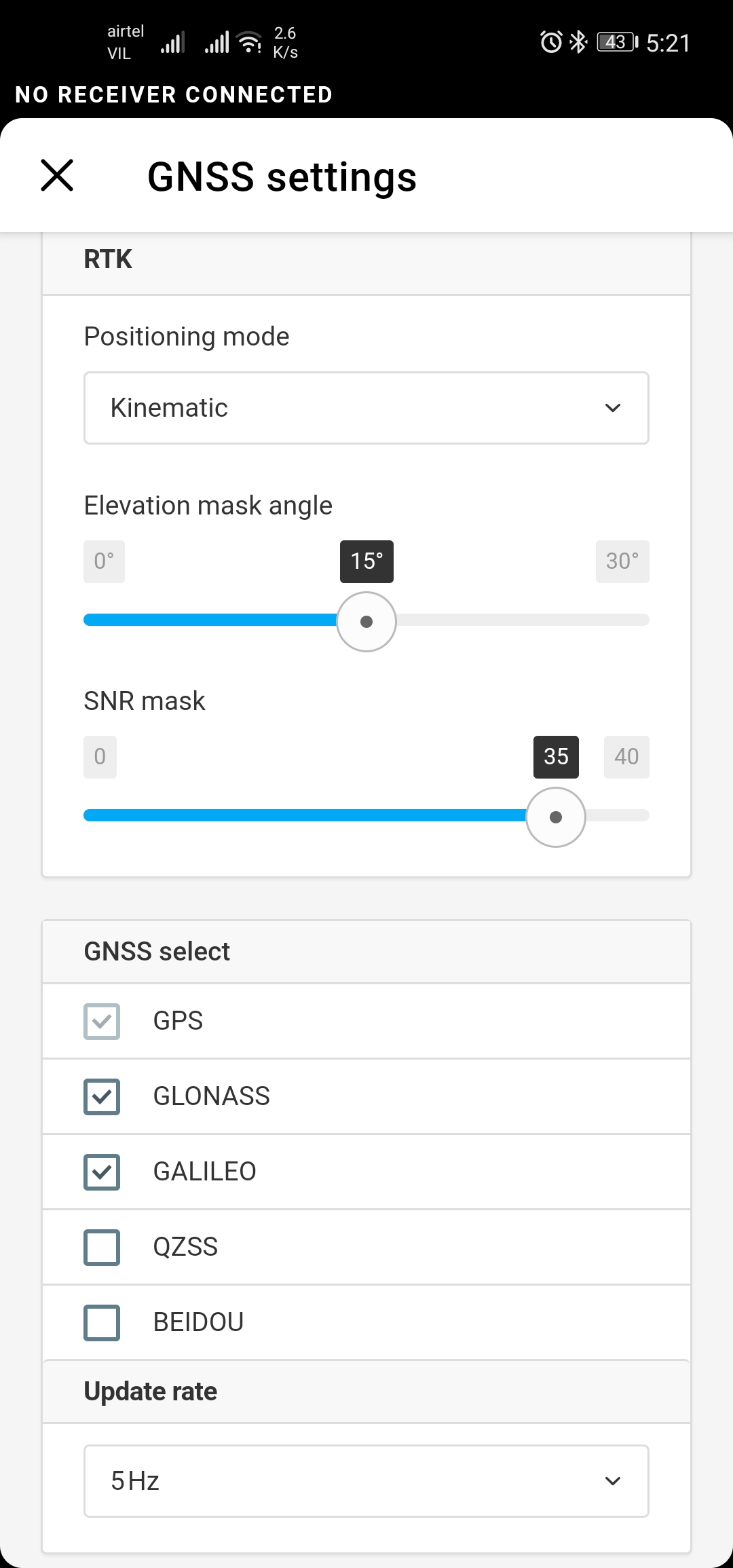
one thing I want say that above RTK fixed happened only when changed in M2 position output NEMA messages all changed to 5Hz…but its default value is 1Hz,again I tried to change to default value 1Hz but again RTK fixed issue happened as usual.
I enabled all GNSS setting and all RTCM3 messages along with NEMA messages all at 5Hz its rtk fixed solution without any issue except mission planner says that unhealthy gps signal.
I enabled all GNSS setting and all RTCM3 messages along with NEMA messages all at 1Hz its rtk fixed issue happening.
summary:
1. Respective of setting of NEMA messages rtk fixed solution happening.
2. Disabling of GNSS setting and RTCM3 messages doesn’t make sense.
3. GPS2 refresh rate set to 5Hz only on mission planner.
Unhealthy GPS signal trigger only if refresh rate mismatch.
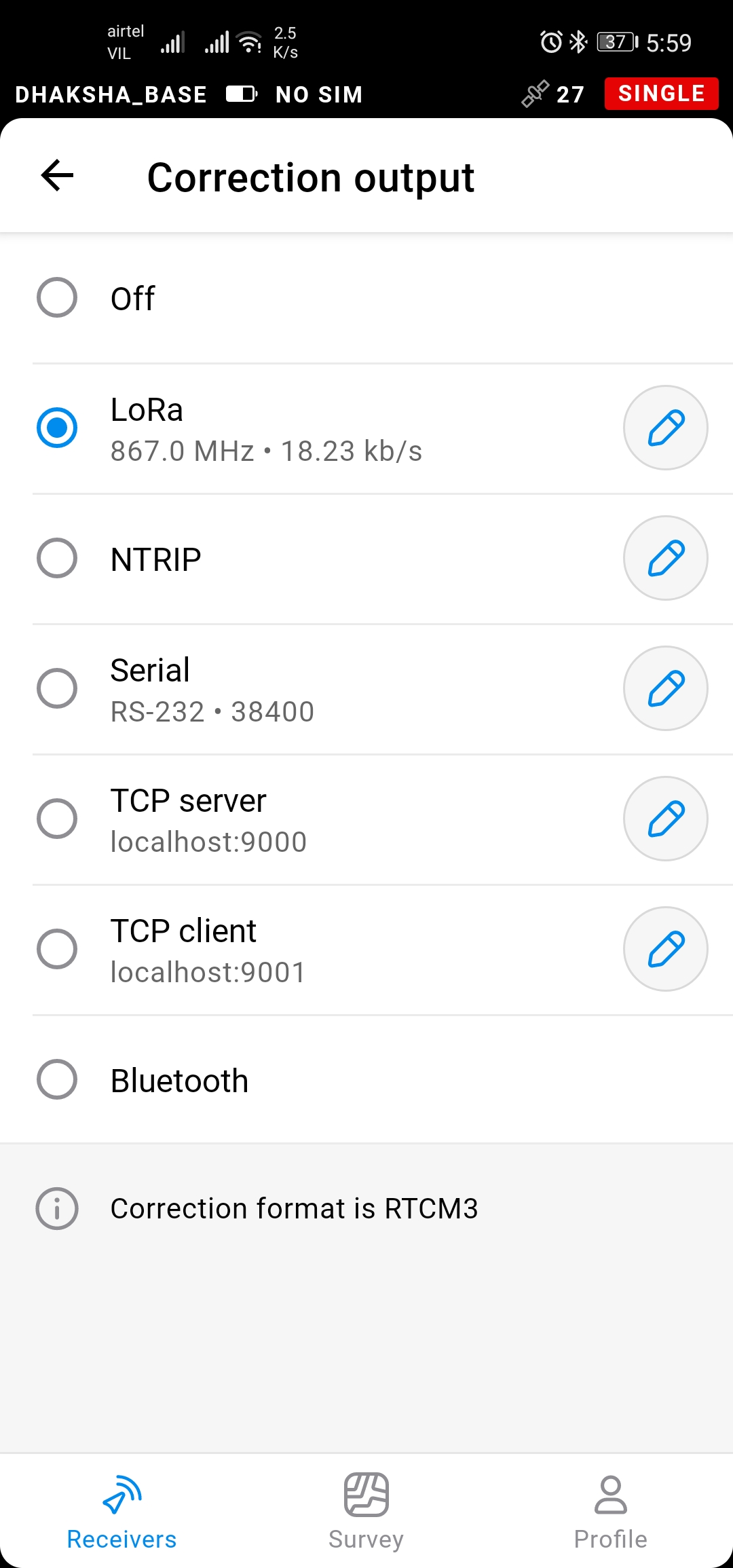
Finally i conducted Lora radio test also and video attached here .
in that also i can find that correction tap keep displaying at random intervel that:
waiting for correction
received correction
https://drive.google.com/file/d/1GTIIxTY4whoDJNlchQlheporh6jhFhIg/view?usp=sharing
Rover rtk set to 5hz and arducopter GPS2_rate_ms2 set to 5hz.
But I’m getting unhealthy gps signal and can’t arm the vehicle as it’s says prearm warning as above?
What I am still missing?
Today I have selected only GNSS is GPS,Galileo,Glonass in both RS2 and M2 .
RTCM3 messages also set to 1006 and 1074,but still I’m getting prearm: unhealthy gps signal .
I have disabled QZSS and beidou and continued same test for 20min.after disabled QZSS and beidou rtk fixed working fine. Then rebooted both unit without not changed any setting,but next reboot it was created same problem
I’ve checked both of these logs. The screenshot with no gaps was from the first test with QZSS and BeiDou disabled, where the RTK worked fine. In all other RTCM3 logs, there were 10s gaps in the RTCM3 log.
I am using RFD900x data radio which very familiar for ardupilot .as suggested by emlid manual I have set every parameters for radio I was done very very carefully .so no doubt about the radio.
As I can see from the video of the LoRa radio test, the age of differential was only up to 2.5s, and the receiver got a stable Fix. So, the issue with gaps in the RTCM3 logs appears only in the telemetry radio setup when the radio can’t handle such an amount of data. The receivers themselves seem to work fine.
I can hardly check why the RFD900x radio can’t transmit all the correction messages enabled since the issue is related to the 3rd-party radio setup. For now, I can only suggest trying enabling GPS and GLONASS only on Reach receivers and change the baud rate to 115200. It should help the communication channel to work more effectively.
The switching between Receiving corrections and Waiting for corrections statuses seems to relate to an improper display that shouldn’t influence the receiver performance. To check it, you may provide the RTCM3 log from the test with the LoRa radio. If there are no gaps in the data, it will show that the corrections were transmitted fine.
Sent M2 full system reports also to be check while its most of the time it’s keep disconnecting to reach view3 and getting over heat as mentioned already in threads and email also?
I’ve checked the Full System Report from the device. According to the Full System Report, the Reach M2 CPU doesn’t overheat.
We provided a fix for the issue with disconnections from the ReachView 3 app in the 26.1 firmware update. Could you please clarify if the issue persists after the update to the latest 26.2 firmware version?
with above setting rtk fixed ,but mission planner keep says that unhealthy gps signal.
In most cases, the Unhealthy GPS signal note appears if the sky view is partially obstructed or RF noise from electronics interferes with the signal. Do I understand correctly that the Reach M2 antenna was provided with a clear sky view during the test? If so, I’d recommend checking if placing the antenna higher can help. We usually recommend placing the antenna on a 15-20 cm pole.
just came out from the RTK testing and performed PPK with quadcopter as setting follows:
Arducopter installed with Reach M2 connected with camera Hotshoe and when manually triggered seen that Gps time stamp appears.
M2 configured with all GNSS select and 10Hz rates .
Base logged with 1Hz update rates placed at known point for 3hrs.
flown mapping route and landed arducopter again checked camera GPS time stamp at ground its working.
my problem is when i plot ROVER UBX file it shows like this
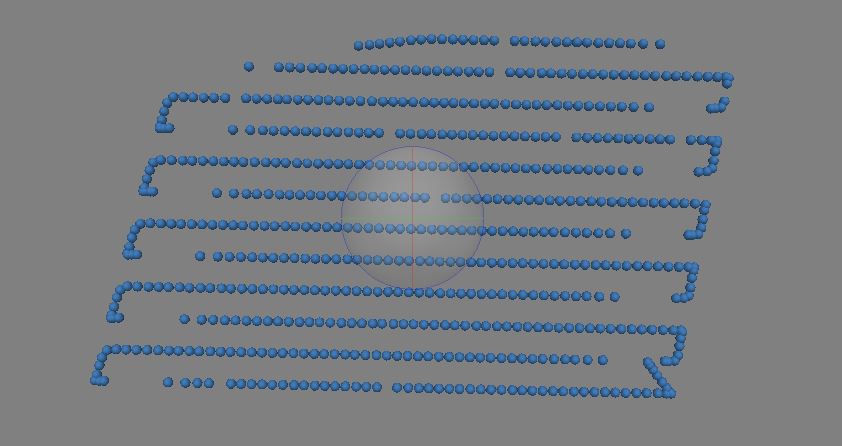
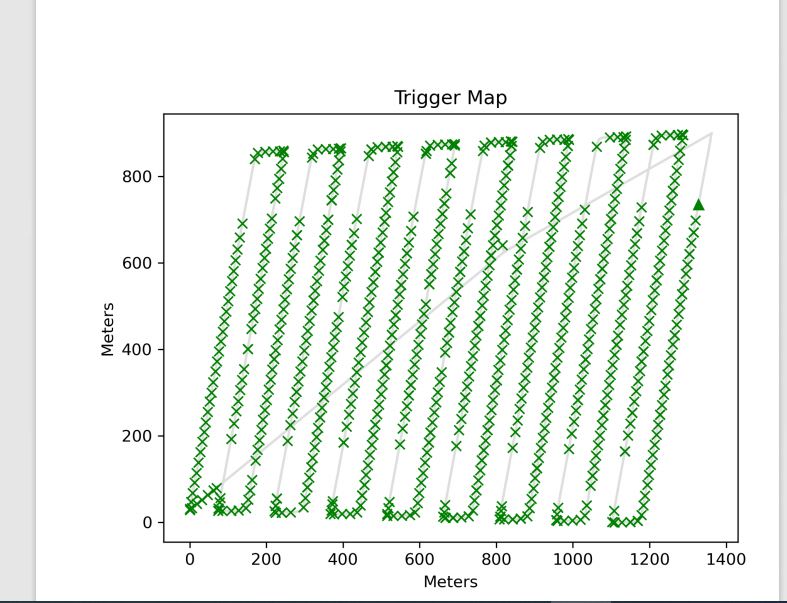
conducted 2 flight both of had same kind of issue.
attaching here with 2flight rover UBX file and BASE RINEX and UBX file.
https://drive.google.com/file/d/18V5aishJOpW1h3-epwgRQ1Wy7IHTJy5x/view?usp=sharing, https://drive.google.com/file/d/1CL1FTZn3Hcxh_Iz8gc_PSwj_KWbBXvU5/view?usp=sharing, https://drive.google.com/file/d/1HecBiKl6LV_dz2Kfu0e0bb341GQ0D7Pb/view?usp=sharing, https://drive.google.com/file/d/1P50jtD-WH0L-iBeqyQFY671_IAGedAdM/view?usp=sharing, PPK test 1Sqkm hanumathapuram.WayPoints - Google Drive
what could be the issue?