Hi dear team Emlid,
@tatiana.andreeva
@polina.buriak
I just start working on reach RS2 and M2,just while I am into lot of questions and basic doubts.
since I’m beginner for this emlid Reach RS2 and M2 just gone through its related documents here Docs – manuals, specifications and tutorials | Emlid and followed steps also.
Just updated Reach RS2 and M2 firmware to 26 and started working for the RTK setup between RS2 and M2.at beginning itself got confusion that it showing Base as rover and Rover as base in the status tap of the each unit.
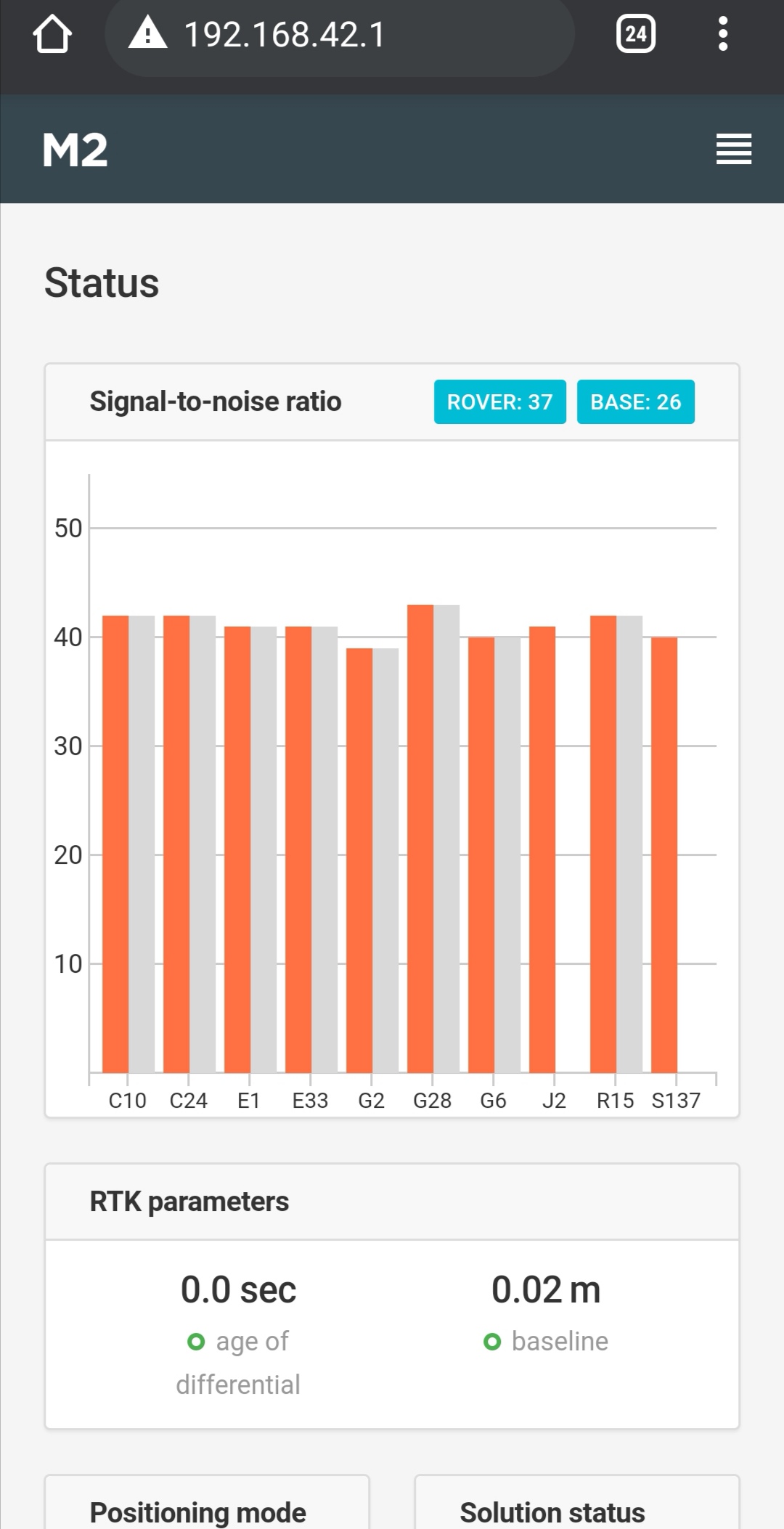
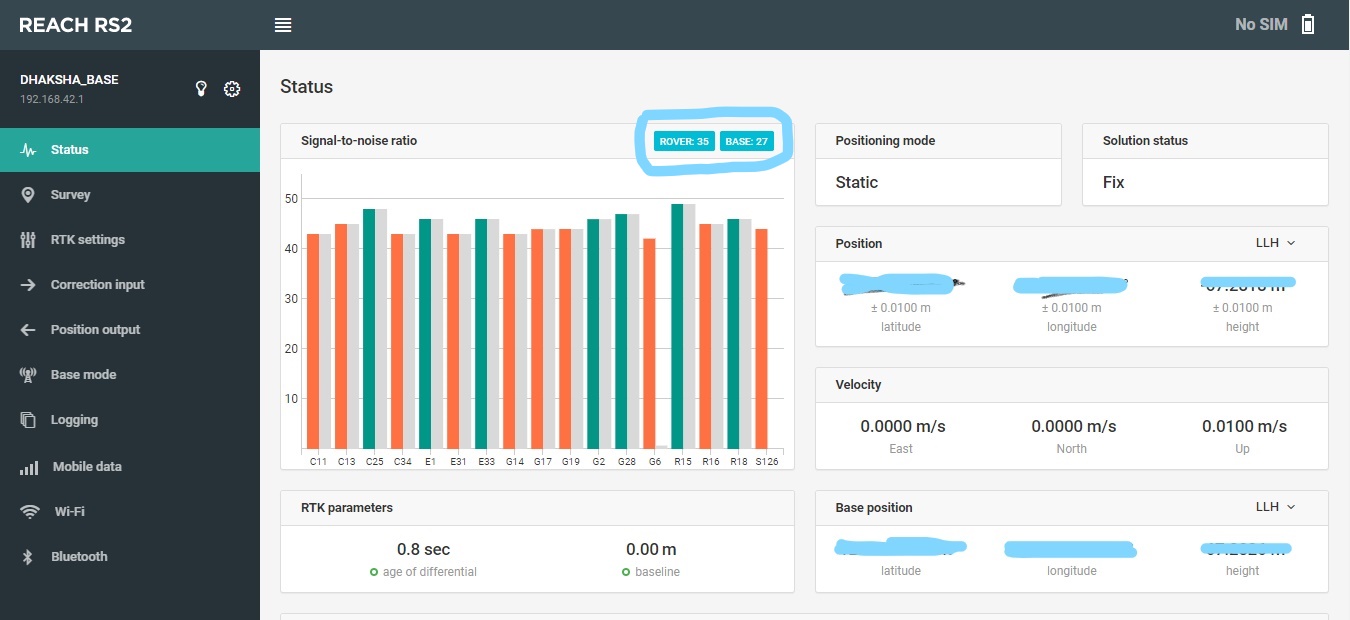
as you can see screenshot of reach M2 rover sats 37 and base sats 26.but actually Reach RS2 satellite is 37 and Rover reach M2 satellite is 26.its also happening in REACH RS2 page also its Normal? there is a big doubt in find which one base and which one is Rover.
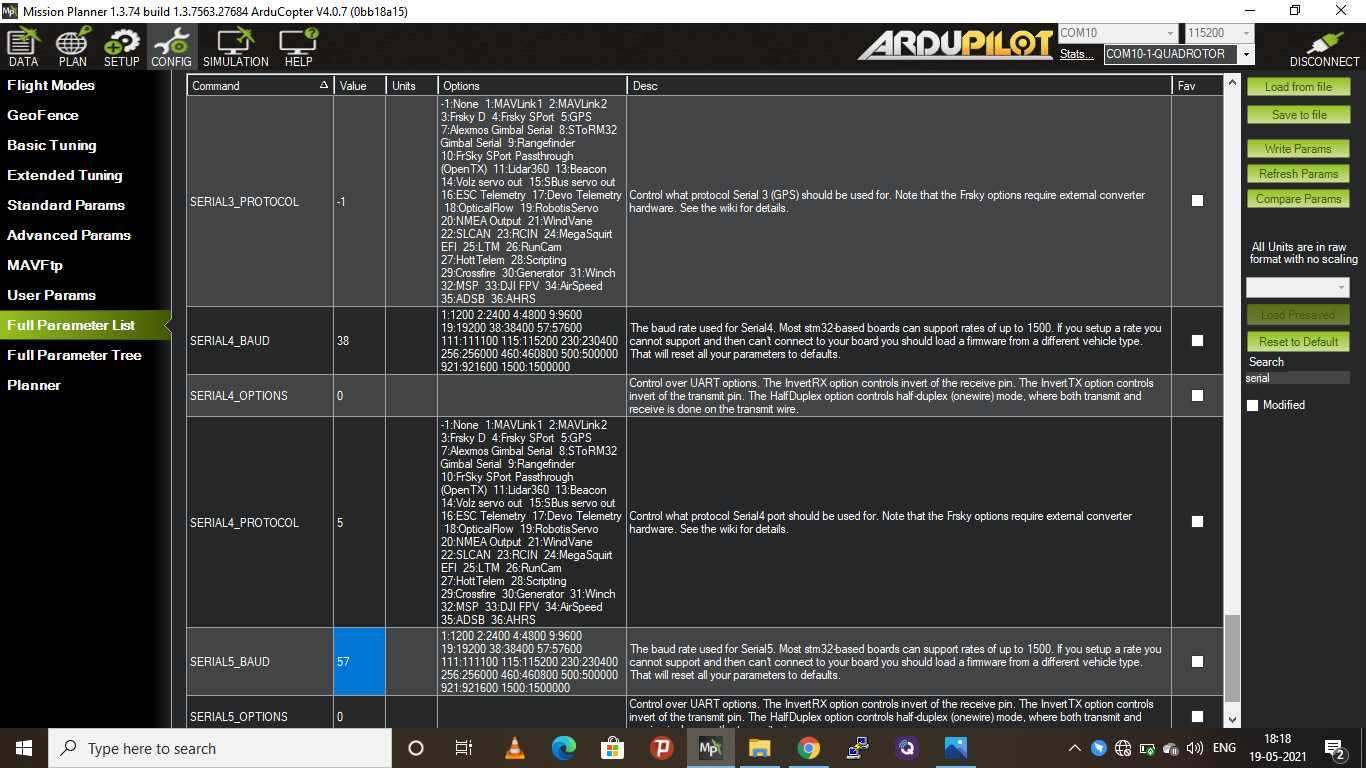
I didn’t get fix solution on REACH RS2 until I set correction input. Its necessary for RTK based survey .same to be done on Reach M2 Rover also to get it fix solution. I have used TCP protocol to send the correction between RS2 and M2.i have doubt in that also
as per my knowledge both RS2 and M2 IP address is same when hotspot mode(192.168.42.1)
start with RS2:
under BASE MODE tap correction output set as TCP---->role server----->Address localhost----->Port 9001
under Correction input set as TCP---->role client----->address 192.168.42.1---->Port 9001.
for Reach M2 setting as below:
under BASE MODE tap correction output set as TCP---->role server----->Address localhost----->Port 9000
under Correction input set as TCP---->role client----->address 192.168.42.1---->Port 9000.
if sender port number should be same as receiver port number to data transfer .but here RS2 having same port number for the correction input & output as 9001
M@ has same port for correction input/output as 9000. if this setting is right can you describe how?
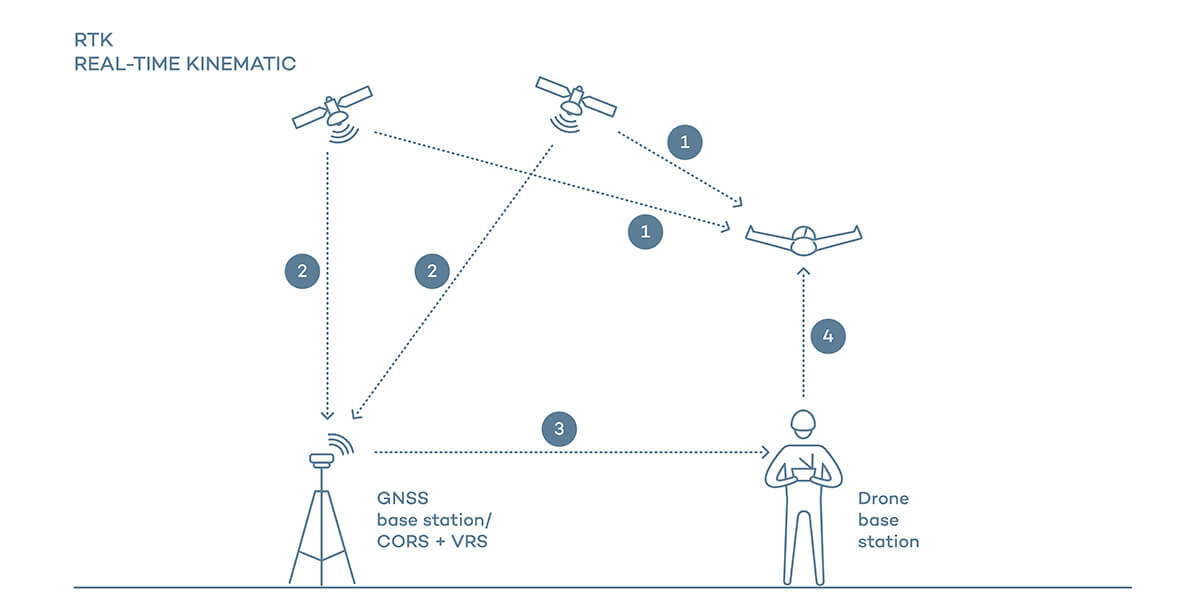
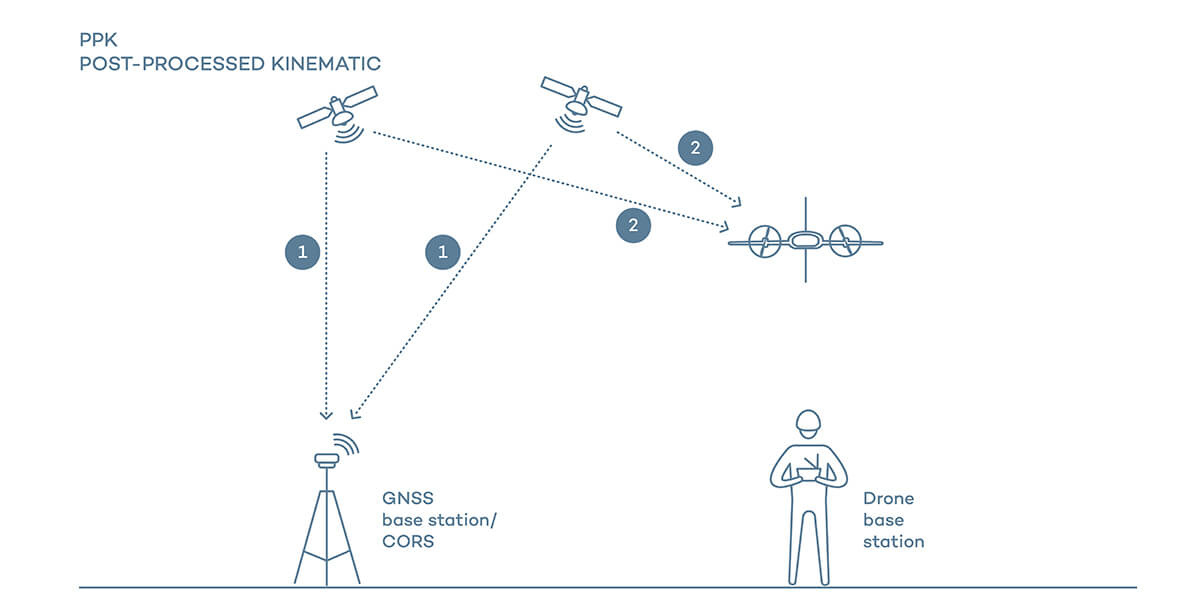
my main aim to do PPK as well as RTK at the same time with PIXHAWK flight controller and mission planner. Cancan anyone clearly guide me for doing PPK/RTK in single flight.
As per my guess this is going to be my integration plan for PPK and RTK.
Pixhawk integrated with Reach M2 via serial port S1 or S2.for PPK M2 C1 port to be connected with camera hotshoe.
please guide me for the following doubts?
REACH M2 correction input ?
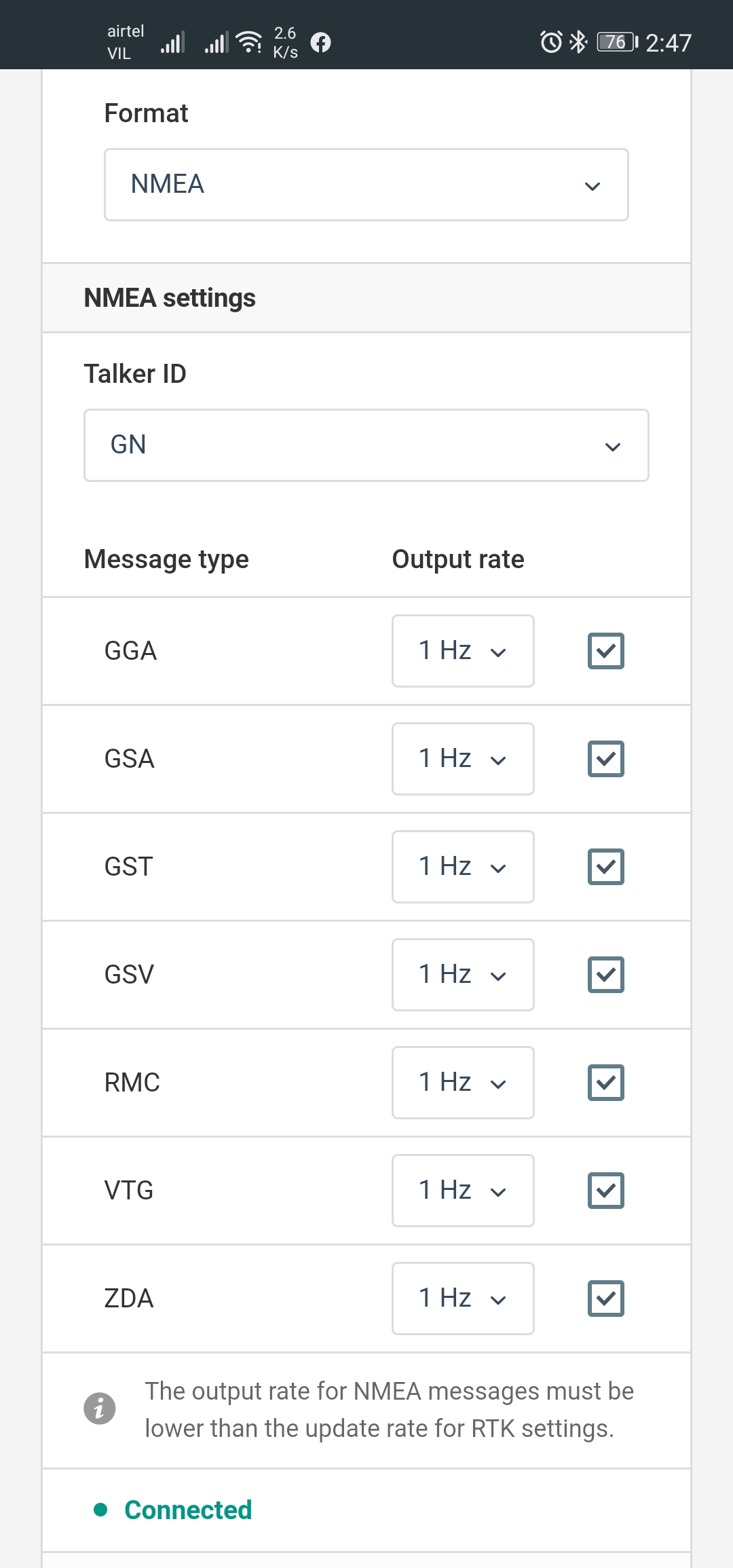
position output ?
Base mode ?
REACH RS2 correction input via TCP protocol (server )-------mission planner RTK/GPS(client)
position output?
Base mode?
components used : Pixhawk flight controller
emlid REACH RS2 & M2
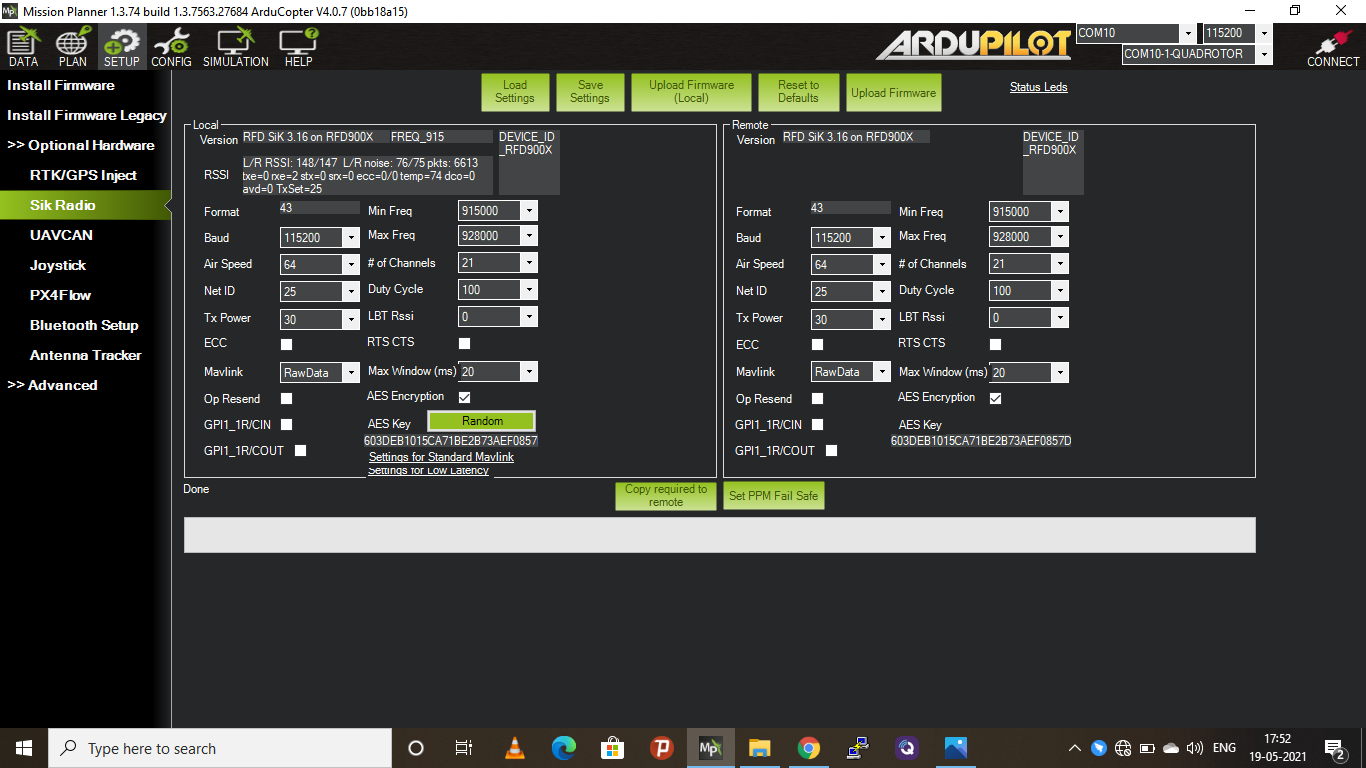
Data radio RFD900x (both MAVLINK & Emlid)