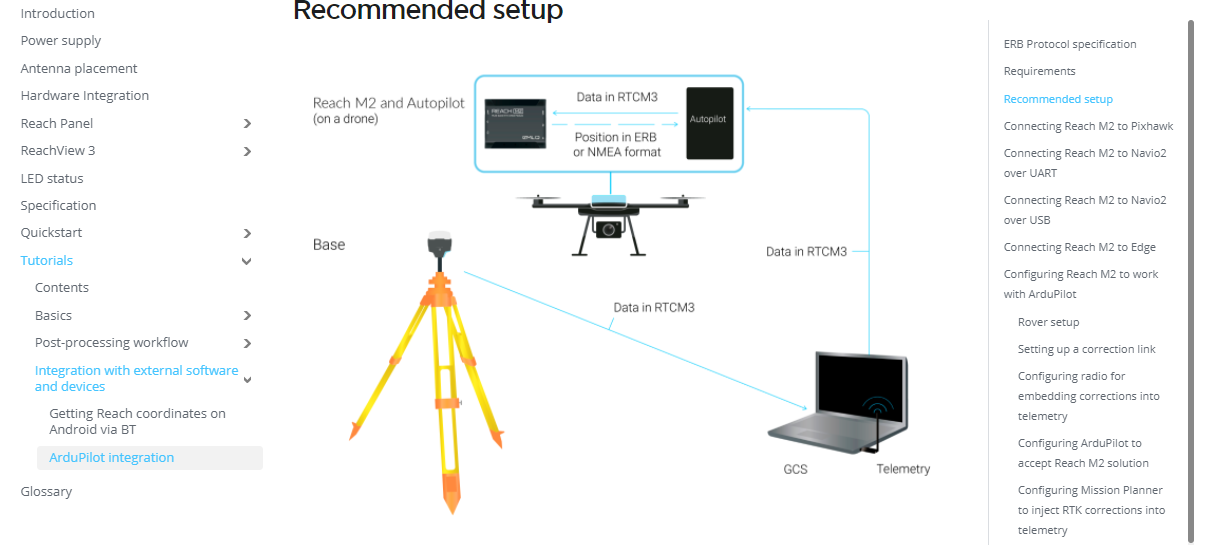
I’m outside of the room and RS2 in HOTSPOT MODE which directly connected to my laptop ,there is no router involving.
I’m sending base correction to mission planner GCS(laptop)via TCP protocol. Mission planner send those correction simultaneously with connected serial data radio(GROUND).
other pair of the(AIR SIDE) serial data radio connected to Pixhawk autopilot and M2 connected to PIXHAWK autopilot.so correction forwarded to M2 via PIXHAWK
this is the reference documents which related to ardupilot integration with emlid M2.
Just for a quick troubleshooting test, link the RS2 directly to the M2 it should get a fix without issue.
I think the weak link in this diagram is the laptop, does it have antivirus that needs port rules made to allow pass through of data without being filtered?
Do you have USB power saving enabled? also called Selective Suspend? If so disable it.
Is the laptop on battery or plugged in while doing the test? How are the power savings options configured?
Is the Program being affected by windows famous “Run as Administrator” glitch?
Does the telemetry radio run a windows service that needs to be set to always on?
Which means you need learn where the actual bottle neck or slow down is if you want to have steady corrections. The staff and users of this forum can tell you how to do many things but some things are still dependent on the end user doing some research/troubleshooting.
Do some research on how to test connection speed, if possible to ping it will tell you where the slow down is.
Atleast when user strugging with their products they should help them .that very helpful them also to identify any problem that may cause by their products.
I keep learning and no one here is fully learned person…if so there will be no chance of having forum and wasted time here.
There are so many different applications of their product it is simply impossible to foresee/forecast/diagnose all issues.
The users of this forum will try their best to assist you as will the Emlid team. Not having the same components we cannot physically troubleshoot your slow down problem. We give suggestions for you to try. You need to be methodical in your troubleshooting techniques in order to establish what is causing the slow down.
These are very affordable units! Try spending 5 to 10 times the amount you paid for a M2 or RS2 from Trimble or one of the other big companies and find out their support only pertains to their products not your application.
We are the user of Trimble GPS also so don’t compare any other products which not related to this issues . All here are working for trying to get solution only ,that’s why I keep asking and posting my issues that could troubleshoot here.
I’m very new user for this products day by day I will keep improving when using it.
I’ve discussed your setup with the team. As Christian said, it looks like the communication channel was saturated. That’s why you got up to 10s age of differential. To check it, you may try to connect Reach RS2 and Reach M2 directly (not via a telemetry link), as @PotatoFarmer suggested.
Using GPS, GLONASS, and Galileo should be enough for Reach to calculate Fix. To understand why you get Float only in this case, please collect the following logs for 10-15 minutes and share them with us:
raw data, position, and base correction logs from Reach M2
raw data log from Reach RS2
It would be of great help if you conduct 2 tests to get these logs with different settings:
You choose all GNSS and see high age of differential and Fix
You choose all GNSS except QZSS and Beidou and see < 1s age of differential and Float
For your reference the M2 powered via only S1 port and other side C2 leave it as it is.
If the Reach M2 unit is powered via S1 only, it should work fine. To check if the unit faces issues with overheating, I’ll need to check its CPU temperature in the Full System Report. Please share the report with me in PM or via support@emlid.com as it may contain sensitive information.
RV3 & RV2 showing BASE satellite showing 27 only instead of 38.is this right or its bug.
The satellite signals with quite a low SNR may be excluded during correction transmission. Since the signals with high SNR are transmitted fine, it shouldn’t cause any difficulties with obtaining precise coordinates.
Thanks, I’ll be waiting for the results of your tests.
Any how with your knowledge anybody achieved all GNSS types including QZSS and beidou as per manual suggest at 1hz update rate?
All GNSS enabled with the 1 Hz update rate are the settings that we tested and recommend for the Reach RS2 base. As I know, many of our users use them in their everyday work. However, in case the bandwidth of the telemetry communication channel is low, it may be better to disable some satellite systems or messages.
As per suggested by @PotatoFarmer I was tried same with TCP only between RS2 and M2. The video have attched also.
As I see, the age of differential is fine, and the receiver gets a stable Fix. The status may change between ‘Waiting for corrections’ and ‘Receiving corrections’ if the TCP connection via your Wi-Fi network is not stable. You may check the connection between Reach RS2 and Reach M2 using NTRIP or the LoRa radio since they provide a more stable correction link.