



A post was split to a new topic: Can’t get 30 Beta 1 update for Reach M2
MSM7 is roughly the same data as MSM5, but higher resolution. In turn, MSM5 includes one more set of information (doppler info) over MSM4. Considering even with MSM4 we’re already achieving centimetric accuracy, I really fail to see how sending more data, using more bandwidth, will have any added benefit for precision AG. For geodesy and surveying I can see the point, but for AG, not so much.
Then again, I’m not an engineer so maybe you can ask your reps if they have a justification for this.
1 Like
Vegetable farmers would like 1mm if they could get it.
Grain farming 1” is really awesome, 1cm is overkill but very nice to have.
Precision AG is just getting started with all the cool stuff GNSS enables.
3 Likes
I’m thinking that most of the gains that could be had in the future would come from other fields like machine learning and image processing, but I’m getting off topic now. ![]()
You can never drive too accurately. Also implement steering is starting to appear. The tractor is driven by gps as straight as possible, then the implement also has a gps guidance system to steer itself to ensure it does not drift.
Gotta have mm onions lol

5 Likes
Imagery map for surveying’d be a nice update! As an built-in option, or allowing the user to enter a WMS server to load the images.
1 Like
Hi Noel,
Thanks for your suggestion!
I indeed see how useful it may be. However, if you work with our Caster, then we have a step-by-step guide explaining how to connect a base and a rover via NTRIP for passing and receiving corrections. It doesn’t contain the instructions for the configuration of the 3d-party receivers, but it shows how to connect them together.
Hi David,
Thanks for your feedback!
The Reach Panel doesn’t have a screen for surveying, so the satellite map view isn’t provided. But this is something that may be considered for the Web interface!
2 Likes
That’s interesting. Was the receiver placed outdoors at that time? I assume that this might have happened because the receiver couldn’t receive a good-quality signal indoors, so the bars were always low. But please let me know if I’m wrong with my assumption.
Hi Grant,
We’re glad to hear about that! It’s really great that the connection was stable.
Hi Caleb,
Reach RS2 indeed doesn’t output MSM7 messages by default. Usually, MSM4 messages are enough for 3d-party receivers. But I’ve added your notes as a feature request!
1 Like
Hi @enemotrop,
Thanks for your request!
Reach Panel interface doesn’t have a function for surveying. That’s why there’s no option for checking the different map layers. But our beta Web Interface allows you to access survey project data! So, supporting the images from WMS servers is something we could consider for Web Interface.
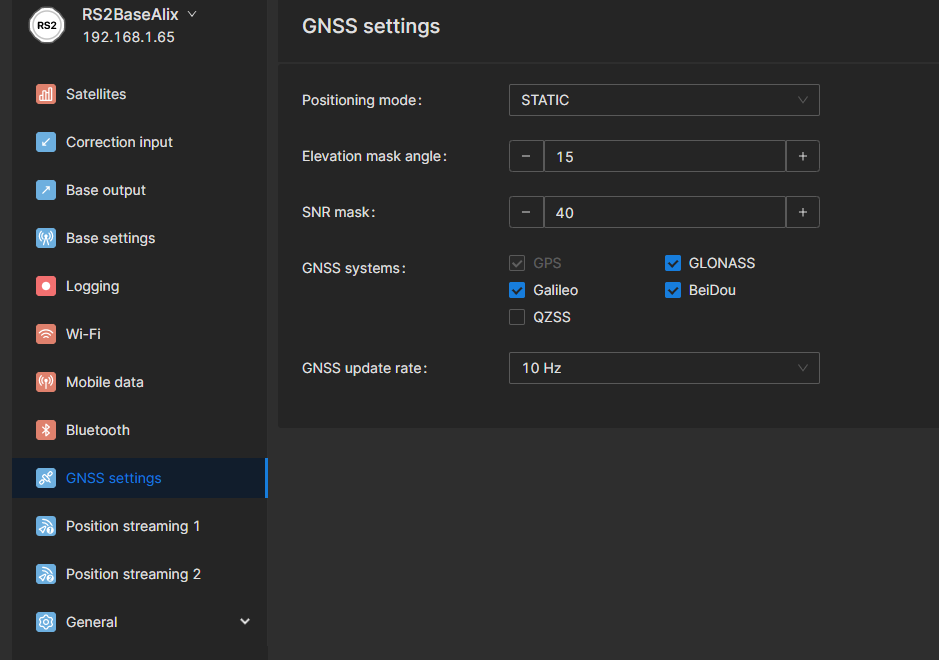

Hi David, my guess is the satellites page is programmed to show you all satellites visible to the RS2, even those below the SNR threshold. But only those above the threshold are actually used in computing the position. In terms of the base transmitting RTCM corrections, I’m unsure if the base uses the SNR mask to limit which to transmit, or if it transmits all of them and let’s the rover use it’s own SNR mask to limit them.
The new browser interface is slick, seems more responsive than old one. Really like the layout and dark mode.
Well Done!
7 Likes
Hi David,
@Africawaterdoc is absolutely right. The SNR chart shows all the satellites in view. Chosen SNR mask in GNSS settings excludes the satellites from the solution calculation.
1 Like
I Have doubt from these configurations, maybe all of you can I help me.
When I work in RTK, My Base and Rover, should be in “Position Mode=Kinematic”.
What is the different to “Position Mode=Static” to RTK in the Base receiver?. My result will be the other in this Mode?
The suggestion from Emlid is both receivers in Kinematic
I hope not to divert the topic too much