We’re pleased to present a new Beta version of Reach Firmware - 30 Beta 1!
This update is really tremendous. It contains a lot of visible changes and updates under the hood. The main focus is on compatibility with third-party equipment when Reach receivers are used as a Base, a brand new Reach Panel, and performance improvements.
Reach Panel
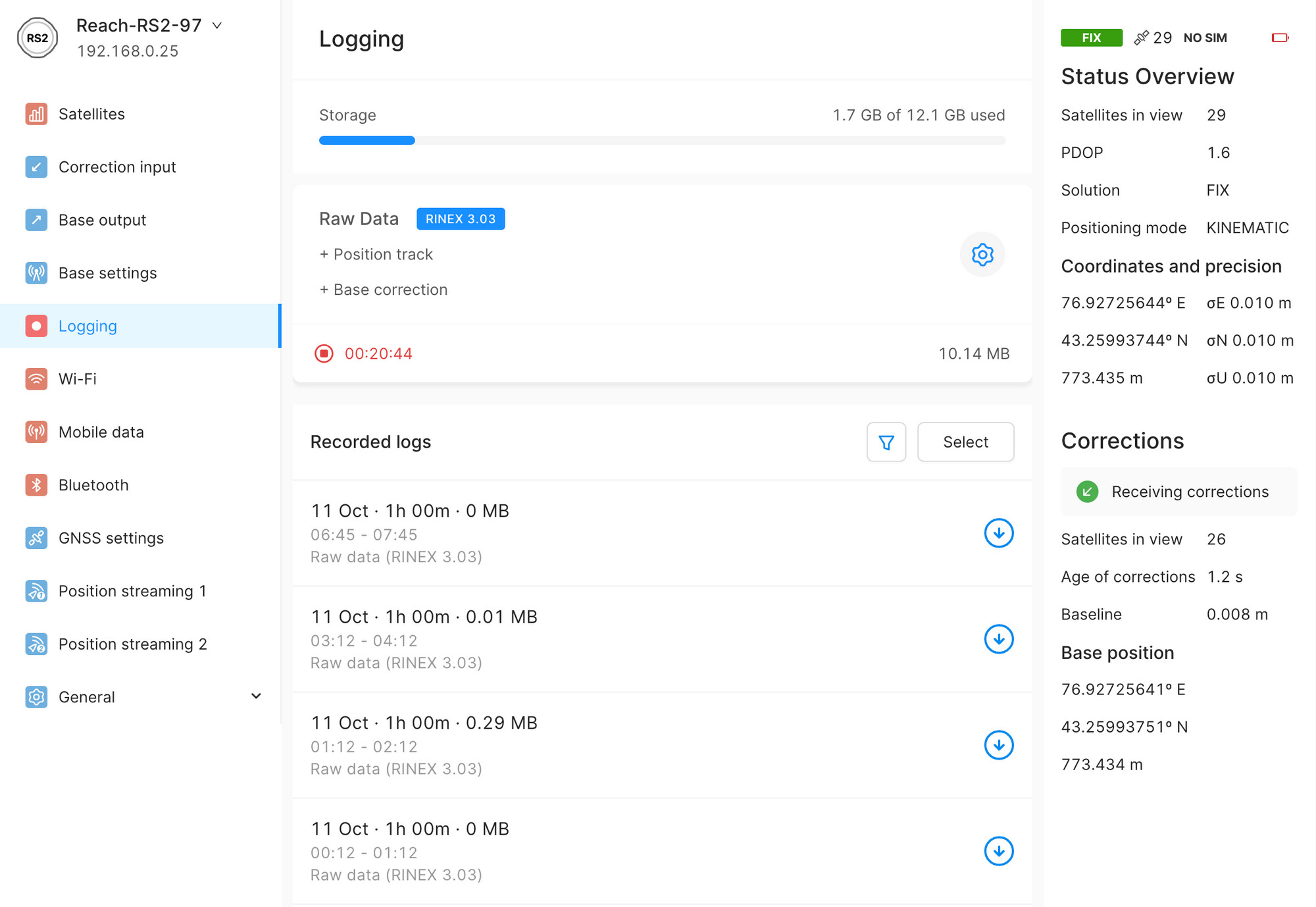
Fresh and consistent views in ReachView 3. Just try it yourself!
Please note, the old web-based survey tool from Reach Panel has been deprecated in the new Reach Panel in favor of the ReachView 3 mobile app.
The full list of changes:
Improvements:
A brand new web interface for Reach Panel and ReachView 3
Improved support for third-party receivers when Reach receiver is set up as a Base
Decreased receiver boot time
Improved connection quality over BLE with Android 12 phones/tablets for Reach RS+/RS2/RS2+
Improved battery charging estimation algorithm on RS2/RS2+
Support for non-ASCII URLs for NTRIP casters
Enhanced RINEX compatibility with third-party post-processing tools
Miscellaneous stability improvements
Fixes:
Fixed the wrong distance in NTRIP mount point list if there are no coordinates
Fixed issues with connecting to Wi-Fi networks
Fixed rare issues with the logging tool on all receivers
This release is a first public Beta for the new Reach Panel, and as usual, feel free to share your feedback on the new features and issues. Enjoy using Reach receivers with the new more rapid and responsive interface!
Can we now see some documentation by Emlid and or users in connecting big brands like Trimble or Topcon machines to Emlid bases via Entrip. Up until now has been a bit hit and miss.
I was playing with the snr and elevation mask and I see nothing changes in the bars . it still shows red ones the are way lower than what I set the mask too.
Have had some discussion with Trimble Support in regards to the use of third party receivers (Emlid) as radio base stations and they have suggested the use of a Trimble TDL450 radio modem via RS-232 port to get the corrections in a protocol that Trimble machine control can understand, eg Trimtalk. Trimbles GCS900 machine control receivers eg MS975’s, 995’s etc are already capable of receiving RTCM messages so theoretically it is possible. The next issue will be getting a base calibration file in a format that the CB460 screen in the machines can work with. Hoping to test these theories over the next couple of months.
@dmitry.skorykh
I can confirm that the Radio they suggest does work, except the issue is really with it losing a fix every 20 minutes.
Unfortunately I was able to test out the beta today, and I did not notice any change.
I used the emlid nTrip caster with our John Deere 872GP and was able to get a great fix with 1cm tie in to the site. But the pattern of losing fix for 10-20 minutes was un-changed from before.
Hmm were you using all constellations not just GPS and Glonass? I was on a job (all Trimble gear) a while back with quite a bit of tree coverage and was regularly losing the base with only GPS and Glonass on. When I included Beidou and Galileo into the mix we rarely lost fix. When you initially startup does it take a fair while to get a fix? And when you lose it is it out for a good while?
I have done some more testing this morning. Using a Hyper VR topcon gps with a FC-6000 controller. SUCESS!!
I have been able to get a fix, move around and collect info and not lose fix for the time I was outside. Even after walking into the building and back out, I was able to get fix right away again.
This is using our RS2 as the base with the Emlid nTrip caster.
Hopefully I can work with our tech supports to see if I can get the equipment working as well. Although they are much more limited so it may not be possible.
Im wondering same thing.
Ive got rs2 for base station and using ntrip to rovers my new trimble and my new novatel receivers dont like it . Intermitent rtk fix and random drop outs, the old trimble works fine as well as the rs2 rover . Is the beta gonna fix it? If not what is the real issue sounds like other people have connectivity issues as well with the big ag companies
Ill try it out.
I got it up and running. My novatel smart 7 rover connects to it and obtains a rtk fix in seconds and stays connected and when i restart it it gets rtk again very soon . Ill update when i have more hours of testing but looks promising .
How can i enable msm7 message in the reach rs2? Im sure theres a way if you could provide detailed instruction of how to?
The Ublox F9P chip in the RS2 is capable of outputting msm7 messages, but it’s not something that Emlid has currently implemented as it’s heavy on the communication bandwidth (especially for Lora). I saw this mentioned on a separate thread where someone was asking about it. But they tend to be very open to feature Request suggestions, so write in your use case and how it would be helpful and if there are enough people interested they may put it on their development roadmap.
That is what is recommended to these newest agricultural receivers like novatel etc. It should work without but it should be there as an option to use i think .