Dear EMLID Community.
I use reach and found it is a great device. In my works i found i got maximum 576 meter from base. May be i am not doing standard things. Can any one in the forum tell me how can i get around 10 km distance from base to rover (LoRa only).Base coordinate is manually entered from national bench mark. what is the procedure of getting long distance. In the manual it seems may be i dont perfectly understand. So can anyone please mention the step and settings… It will help me a lot.
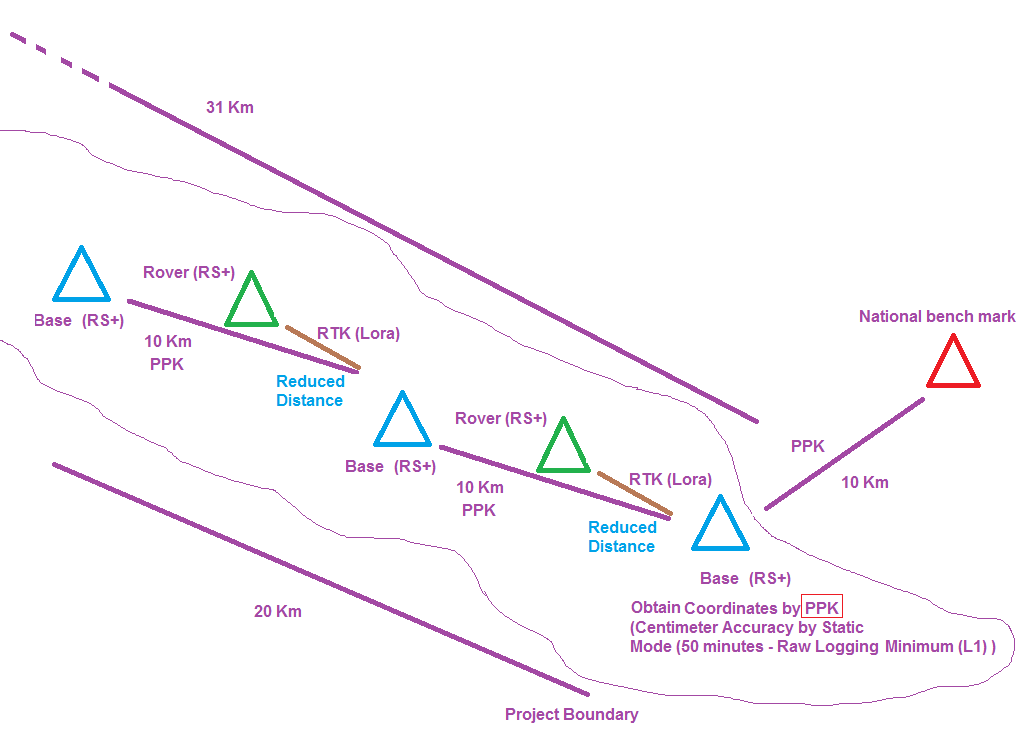
If cannot PPK, maybe set your “own” benchmarks based on the national benchmark to reduce your baseline. I.e. set up on national benchmark, traverse as far as you can towards your area of work, set your permanent own benchmark. (Record point) Set your base on this one, do the same as many times as you need until you get closer to your work site? Bring it to you.
Sounds like you need to use NTRIP or best get at least 1 RS2 and use NTRIP since your baseline is so long which you’ll lose accuracy anyways that far.
If you don’t have line of sight, don’t expect much more than 1-2 km, but typical below 1 km in urban conditions, where multiple obstacles, other transmitters and so on will severely cripple any radio-signals.
With regards to baseline, then don’t push the baseline to more than 10 km, especially if you have suboptimal skyview around the bank of the river.
Oh. No. This is for testing. What will be air data rate. I work the basic settings of emlid. Can you please tell me settings for base and rover for long line. Is the line of site clearance is mandatory?
The idea remains the same :
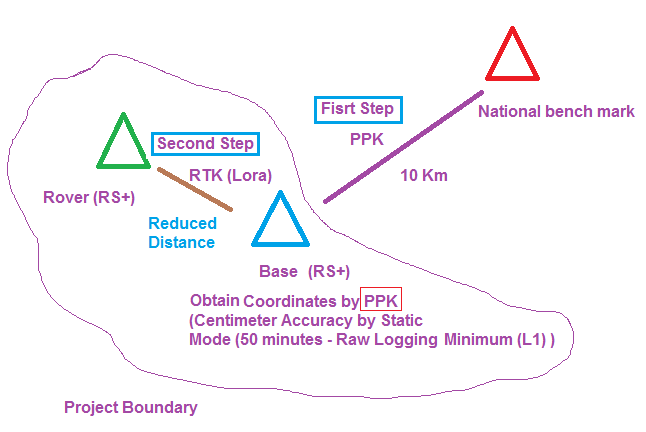
You create your own benchmark using PPK each time you can lost your LoRa connection (a lenght depend on your environment) and survey locally by RTK using LoRa like this Diagram…
But if you cannot PPK, you would have to do all that between the red triangle and your first blue triangle which is your problem (the PPK 10km between the national BM and your first BASE range that max out LoRa distance).
May have to do multiple 1-2km legs until you get to work area. Or just PPK as @Zinou suggests.
For your environmental conditions, I’d recommend choosing NTRIP or PPK workflow.
With the PPK workflow, the precise position is calculated after the survey. It doesn’t require a real-time connection between base and rover. Using PPK with L1 receivers, you can get up to 30-40 km.
If you need precise positioning in real-time, you can configure Reach to output base corrections as an NTRIP station. For this setup, you’ll need to create an NTRIP caster using SNIP or rtk2go services, for example.
Note, both receivers need an Internet connection for this case. If this is feasible for you, in this guide you can find more related info.
Thanks all including gleb. I am testing. Will inform details of the result. Here is I need to know for some silly things.
Rover indicates while saving directly ground z as I observed.
Assume I have one known points without tripod I insert LLH assume z is - 50 antenna height is 0. In rover point 1 is OBSERVED Z assume is - 48 on ground. Then I shift base to point one… Now what will I write in base mode tab about z. Do I write ground elevation - 48 and in antenna height is 1. or add antenna height in z value means - 47?
For ppk I am not clear… Should I add antenna height if yes where? If no I need to subtract after post processing.
The minimum raw logging time is what? Can I simultaneously log rover and base. I want to directly log rinex. And want to skip before rinex tutorial. As I have known gcp than add it in rtklib.
Rover indicates while saving directly ground z as I observed.
You are correct. Z coordinates in the “Survey” tab consider pole height.
Assume I have one known points without tripod I insert LLH assume z is - 50 antenna height is 0. In rover point 1 is OBSERVED Z assume is - 48 on ground. Then I shift base to point one… Now what will I write in base mode tab about z. Do I write ground elevation - 48 and in antenna height is 1. or add antenna height in z value means - 47?
When you increase the antenna height for the rover, this value is subtracted from base elevation coordinates. For example, if base elevation is 48 and antenna height is 1, then the real height will be 47.
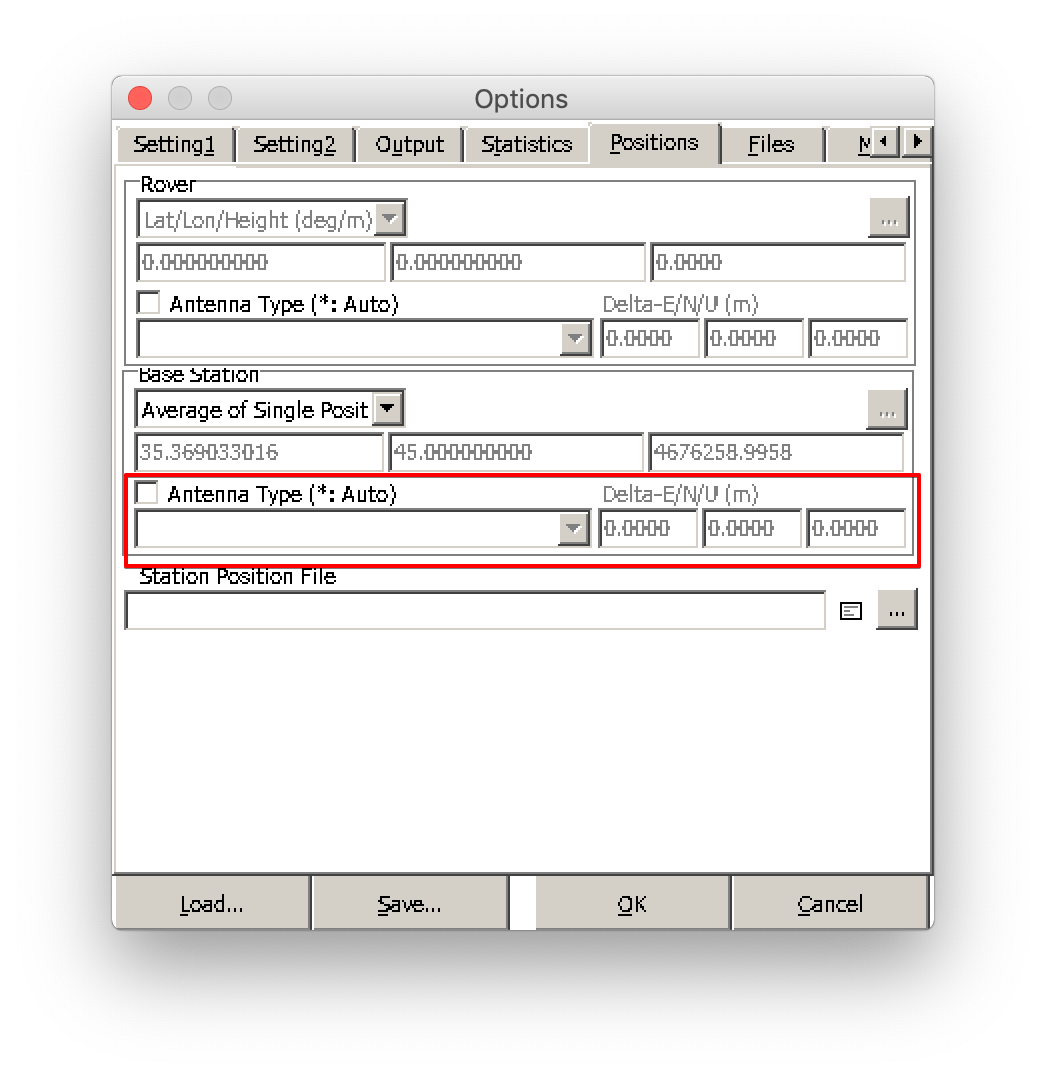
For ppk I am not clear… Should I add antenna height if yes where? If no I need to subtract after post processing.
You can input the antenna height manually in the “Positions → Antenna type” tab of RTKPOST software.
The minimum raw logging time is what? Can I simultaneously log rover and base. I want to directly log rinex. And want to skip before rinex tutorial. As I have known gcp than add it in rtklib.
For PPK workflow, I’d recommend collecting a point for 10-15 minutes. You can enable logging directly in RINEX format in the “Logging” tab for both base and rover.
Thanks Gleb,
Its really awesome answer and exactly what i am doing too Hasnabad.pdf (410.0 KB) although there is same procedure but page 14 and 15 wrong. And it seems there is .4 meter deviation in z drift from ref to obs to ref check.
in issue two, outside temp is 37 one of my brand new RS+ is run on concrete slab without tripod for 16 hours. but the second unit which is on tripod and in same environment continously shutting down. When i restart in battery indicator the rover unit is shutting when temp reach to 60. What is the problem?