The first sketch is two years old. As we have a lot of bad weather, I’m back at the workbench.
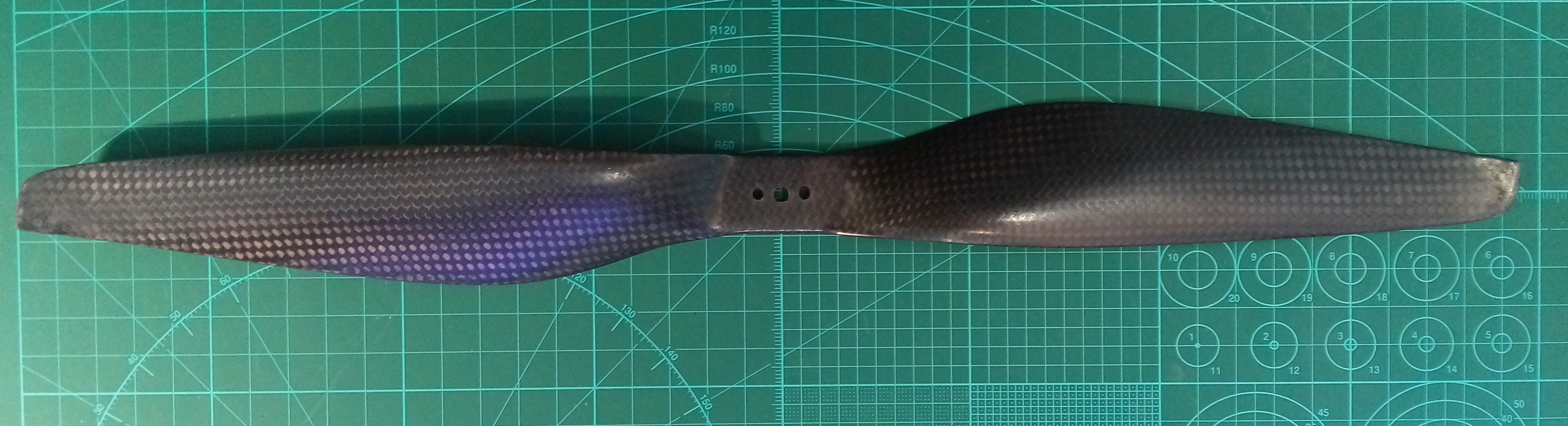
Motors and propellers are second hand. I have T-Motor 4010-14 KV370 and 4014-11 KV370 with roughly the same performances. Propellers blades are DJI 15x5 with KDE Direct.
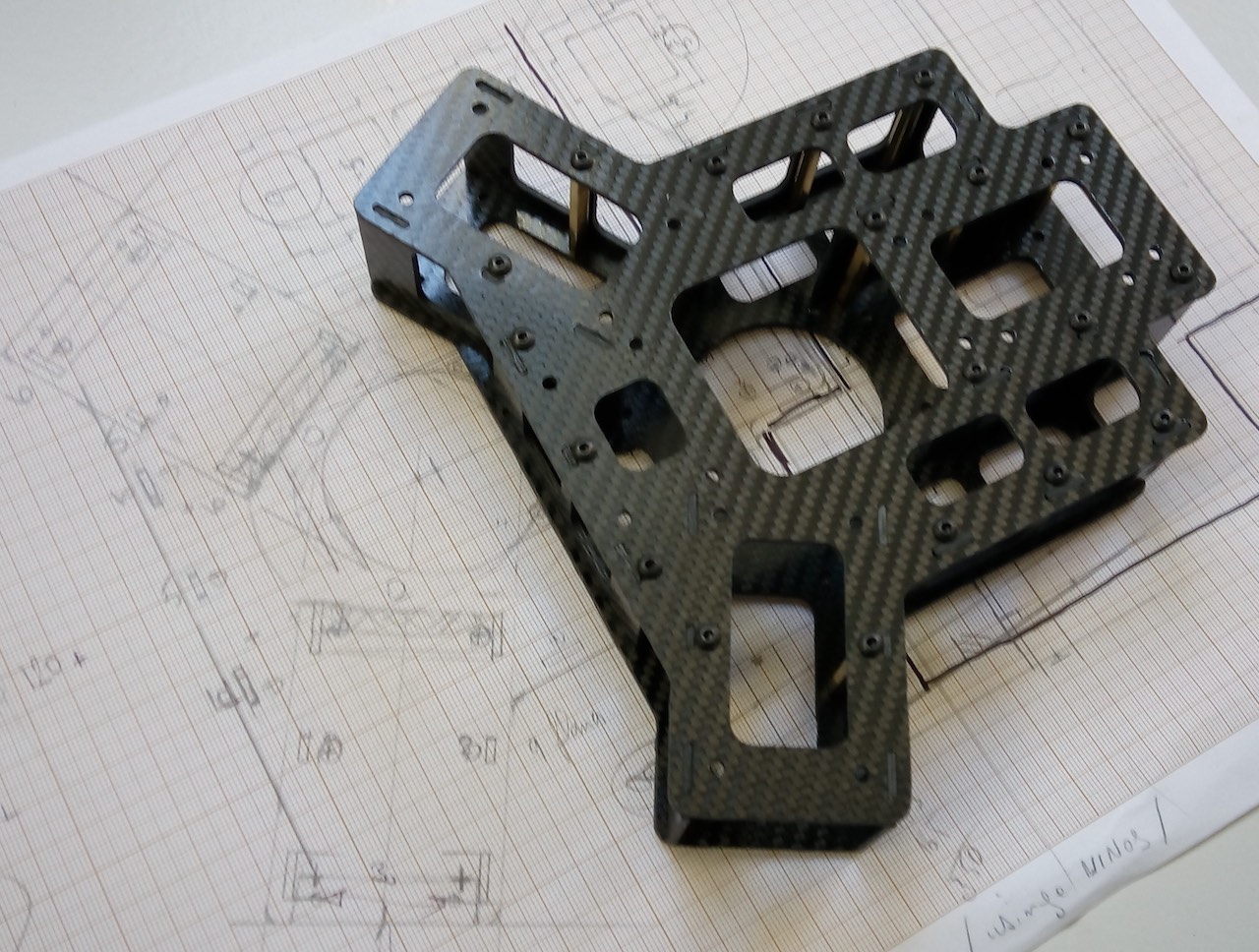
Center part of the Y6 is an assembly of 2mm carbon with torsion box.
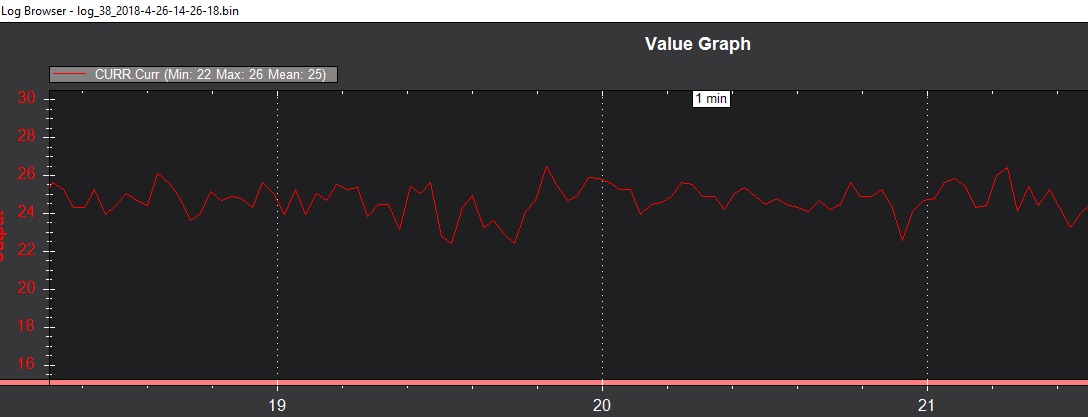
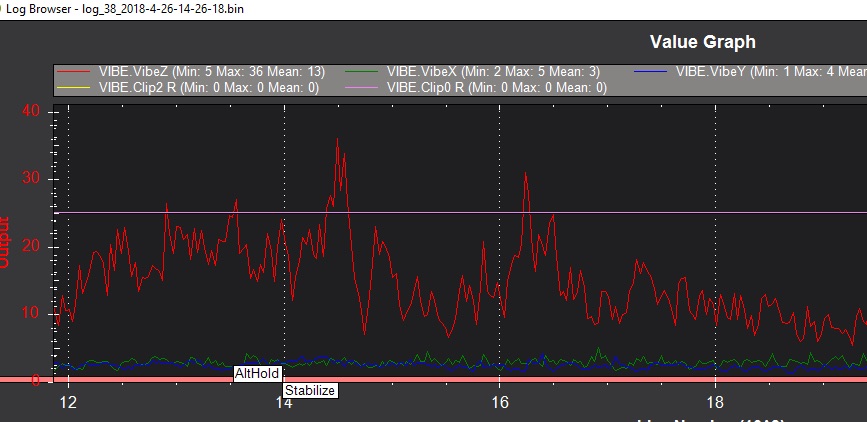
It was the third flight, Yaw is not tuned. Since, I moved the battery trail forward. I’m waiting for carbon blades and will also install Yaw on the gimbal.
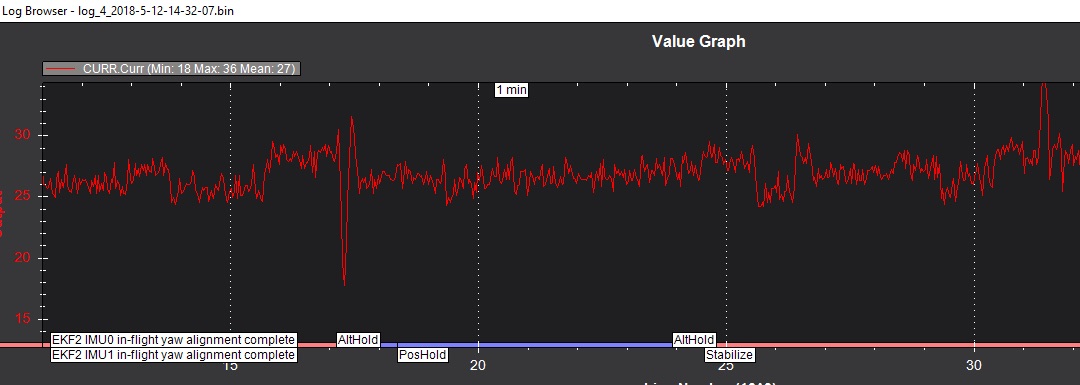
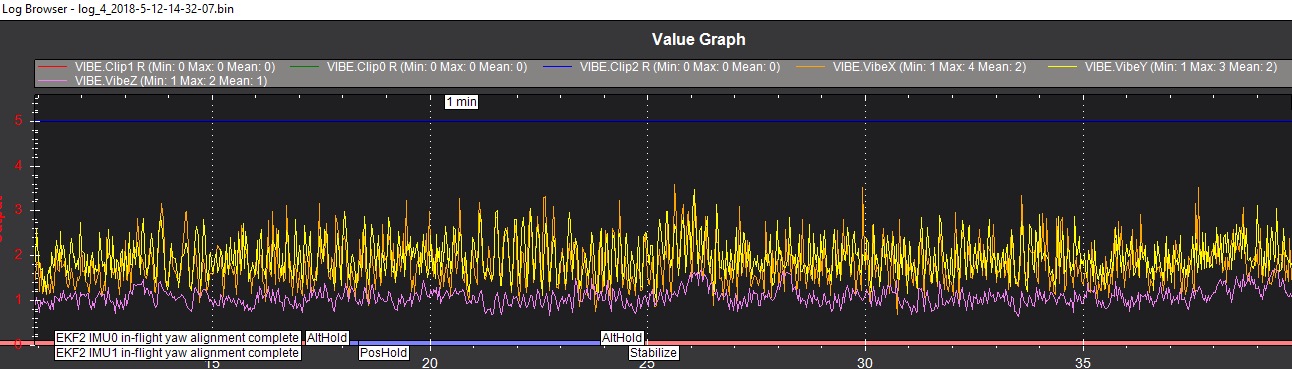
Some news: My Edge is updated to latest Emlid 1.4 image. I had some problems with motors not shutting down when landing after RTL. The problem is solved by removing silent blocks between main rotor frame and battery trail/landing gear/cam support.
I changed the camera. My old gopro had degraded image quality. I have now a Firefly 8S-90°FOW. Video feed in 1080-30fps is ok. I can use it while taking a 16mp photo every 5 sec.
Here is a computer record of the live video feed with QGroundControl. Loiter mode is quite fine with 10 to 15 kts wind. Every 5 sec short black is due to the photo mode. Yaw is not rock steady (small variations) but ok for me. I’m looking for the right parameter to tweak…