



the dongles that are recommended cost like $10 on amazon. I will be trying it out. if using a two pi solution he provides an image. I would assume it is not built using a real time kernel though.
WiFi broadcast looks promising. The relatively low latency (compared to Mobius and other digital cameras) is good enough. Considering the full HD link from Connex costs 1500 euros, if a couple of RasPi Zeros and WiFi dongles can get anywhere near that is amazing!
I stumbled across wifibroadcast almost 6 months ago. Everyone I mention it to seems to be amazed. I wish the latency was lower as I will be using my navio2 and pi2 in voodooquads vdq250 frame. I actually have a skyhero anakin that I would like to use but the pi2 is too big. may need to 3d print an attachment that affixes the navio2 underneath while providing landing gear and protection.
Yay…
I also got my Navio2 today. Great.
Let`s build something cool. 
when did you order? I wasn’t sure if I was going to go with this board but went ahead and purchased it yesterday. lets hope I get mine soon as well and not at the end of february 
Sorry, I just can not hold back. You must be a beginner in forums use, too. What you do here is called spamming and is really not the best way to introduce you to a new community.
1 Like
Hello, I worked for a internet provider and still operate equipment, maybe I can help you with a openvpn fixed-ip from my as21158 and a redundant internet connection. like this you can use multiple usb-umts sticks parallel which will provide redundancy against connectivity loss. i am currently testing such setups.
http://sch-einesystem.tumblr.com/post/97260491328/
contact: maximilian.baehring@zentral-bank.eu
I like the custom battery. What piece did you use for the battery health / monitoring? I can find the cells, but having trouble sourcing one of those.
You should get these batteries: Sanyo NCR18650GA. I’ve been using them lately, and they are better suited. I soldered the cells like a normal lipo battery, with a balancing wire. You charge them with a normal lipo charger. Hopes this helps!
Same! Thx for the share. #Godsent 
I have a doubt about this diagram. What is the channel that this system use to send the input (Joystick) from the Laptop to the RPi? Do you use an RC receiver in this quad? If you don’t use any RC can you explain me how do you use APM Planner without it? … I cannot use it when I extract the RC Receiver from the Navio2 … It says Prearm error: RC not calibrated!!!
Can you help me with this …
Hi, the joystick is connected to the PC like a normal joystick (wireless logitech usb dongle). Mission planner on the PC takes the inputs from the joysticks and sends the controls over mavlink (UDP) to the drone via the internet connection
Thanks by clarify. Then telemetry, video and control are over TCP/IP. I’m interested in the way that APM Planner “talks” with de APM firmware through TCP/IP, because in this way we can use other input systems like keyboard or mouse, like voice commands or commands with the kinect movements … also with BCI gadgets.
I know that the protocol is the MavLink, this is easy … but I don’t know “how” send it over TCP/IP. I have tried it with the “drone-kit python API”. This works in local machine (aka RPI2) but it doesn’t work if you try from other machine (aka laptop).
I need help to understand the link between the APM firmware and the GSC over TCP/IP, in two direction sending and receiving.
Thanks a lot
You can disable single or all prearm checks in the full parameter list.
The parameter is called “arming_check”.
Thanks a lot … I can arm the system now.
Hi, can you please explain how you soldered the batterypack?
Did you use a BatteryManagementSystem to Charge your batterypack btw. how did you connect the balancer cable to the batterypack?
I´ve also buyed the Sanyo cells and and want to solder a 4s5p batterypack but i don´t know how to balance it and wich battery charger i had to buy…
Can you please help me?
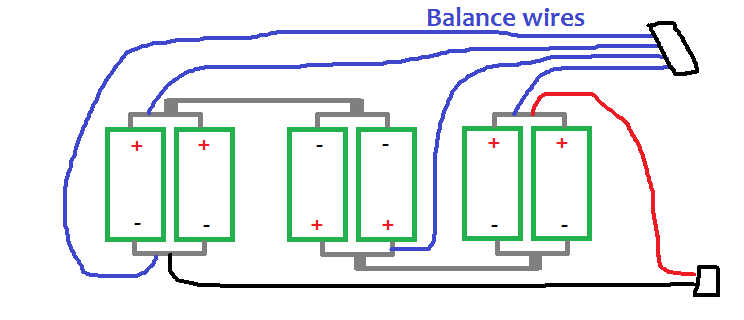
Hi, soldered 5 cells in parallel in a series of 4. Used a normal lipo balancing lead to each pack. Charged with at normal lipo balancing charger. Here is a diagram someone else made, this is for a 3S pack using 2 cells in parallel.
1 Like
Thank you for the quick response.
So you have 5packs of 4 cells with 1balancing wire per pack is that right?
If i understand that right you have to charge all the 5packs separatly and for flight you put the packs togehter in a row and fly.
you could use LG HG2 batteries. 3000mAh, 20A continous.
I have peaked these at 36A, they did not fail yet. much less voltage sag. might even give you longer runtime.
The lates build is found here: My 4th quadcopter build!
1 Like