



I thought I was going to share my current build of a new quad using the NAVIO+ controller board.
It is being built from scratch, key aims are:
long flight time (large props, light frame)
reliability (simplicity, high quality components, GPS signal strength)
long range (4G)
good video (C920 Logitech)
quick and easy to build (-> CF sheets and tubes…)
My design:
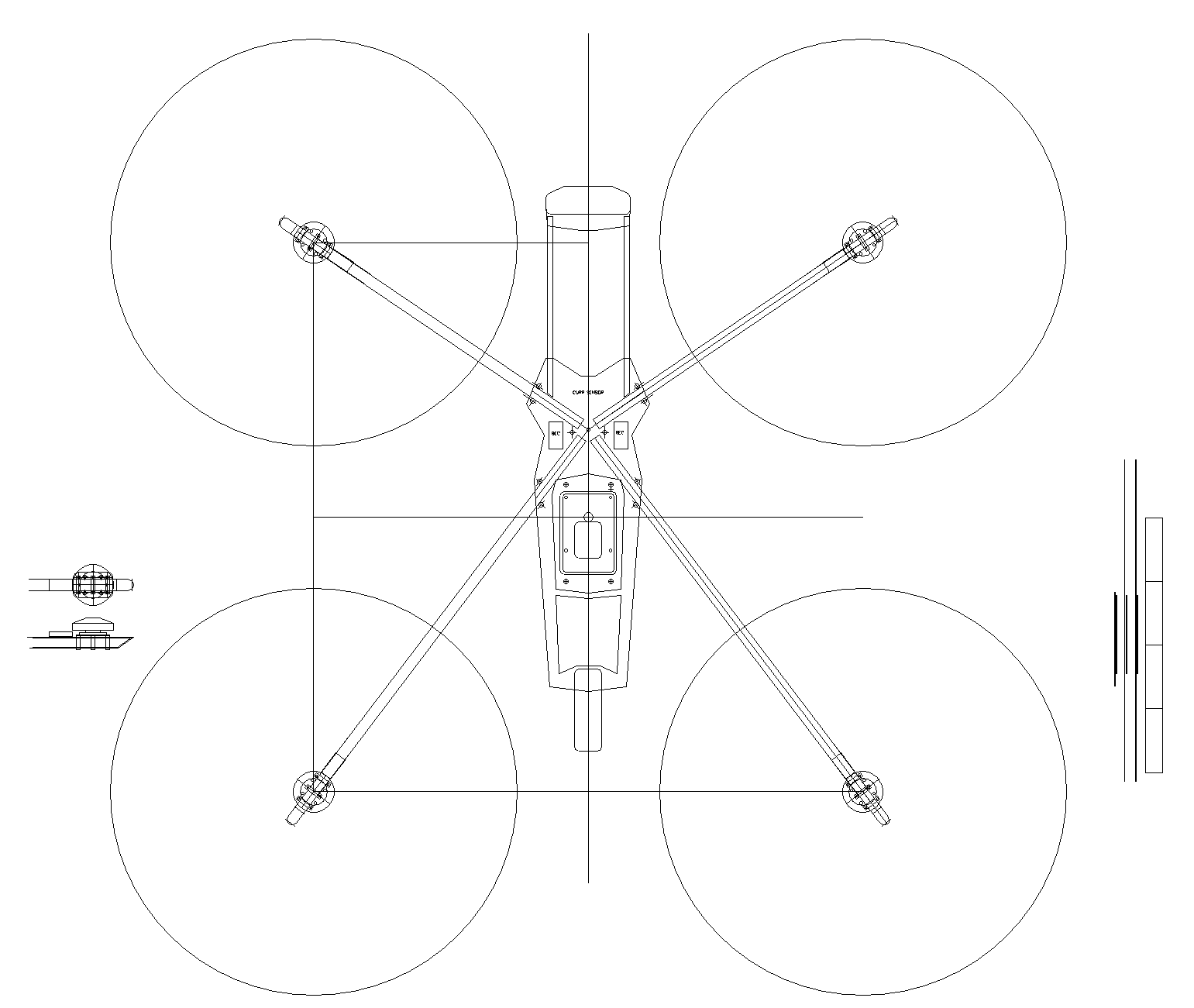
Components:
NAVIO+
Raspberry Pi2
Logitech c920 camera
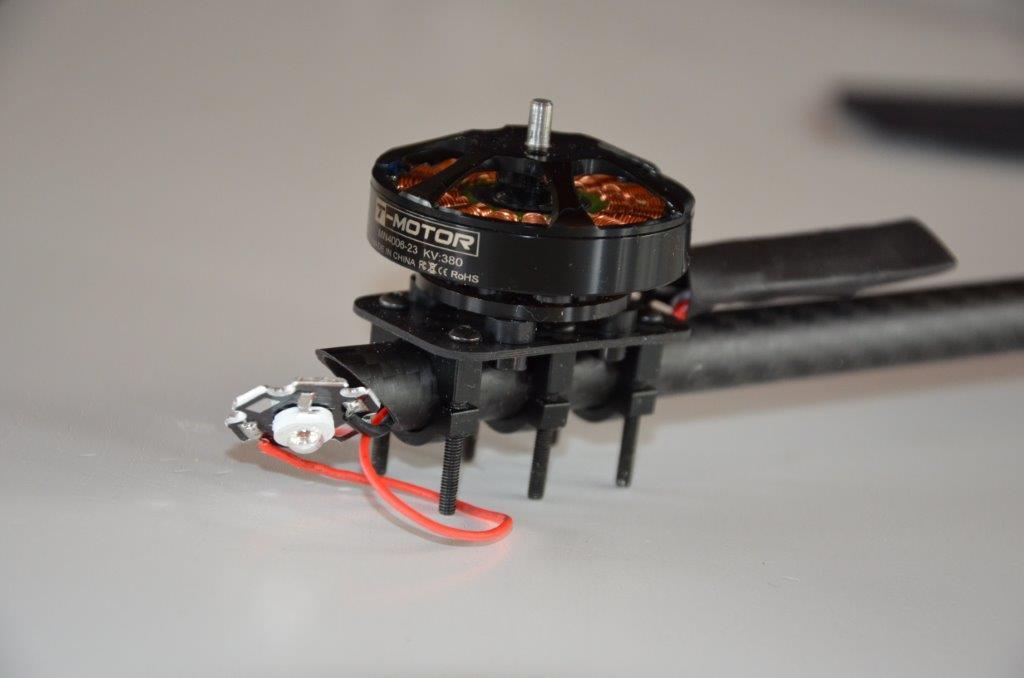
4 x Tiger 4006 380KV motors
12A KISS ESC
17x5.8 CF props
4S battery, 8-14 ah, will try different ones
Huawei e8278 modem, fast, reliable and dead easy to setup
1 RC switch (for LEDs)
4x 3w led
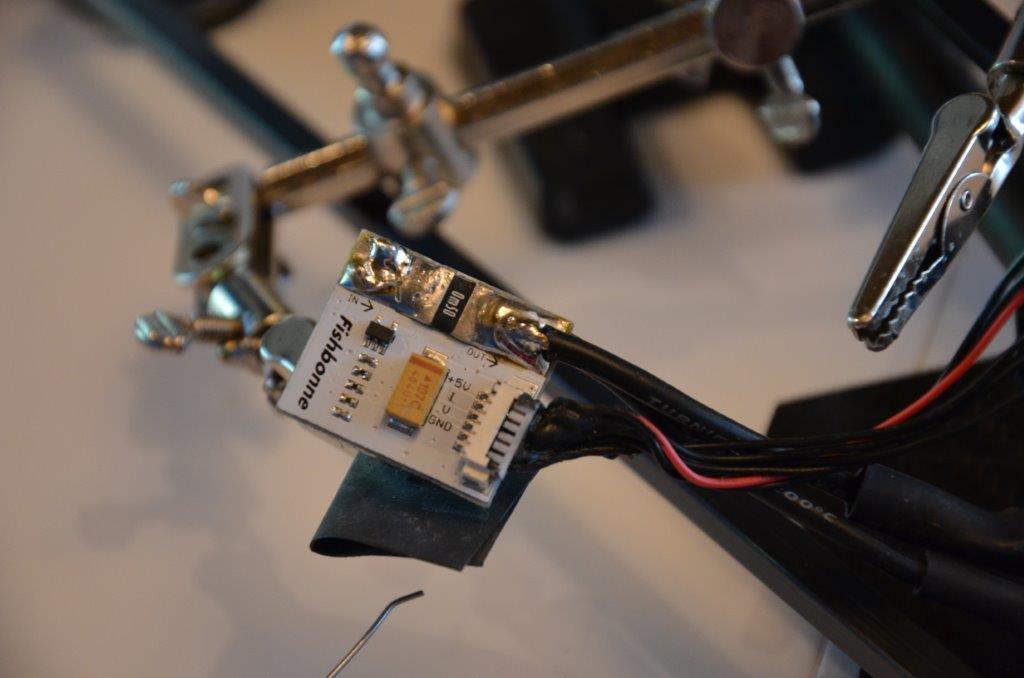
6v 2A BEC for LEDs
5v 10A BEC for for RPi, Modem and servo
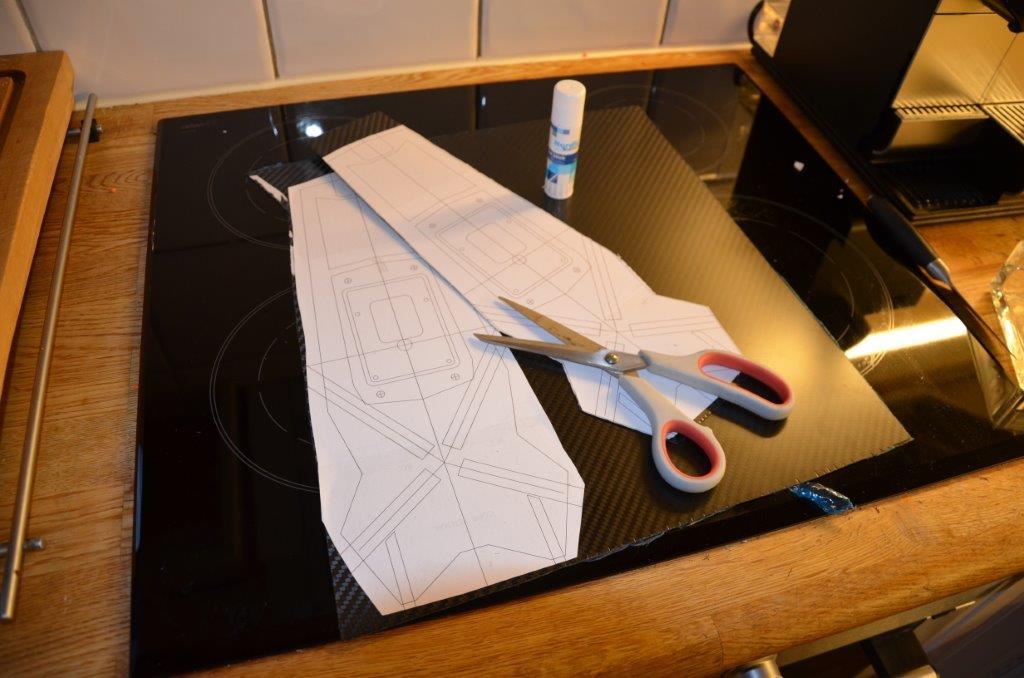
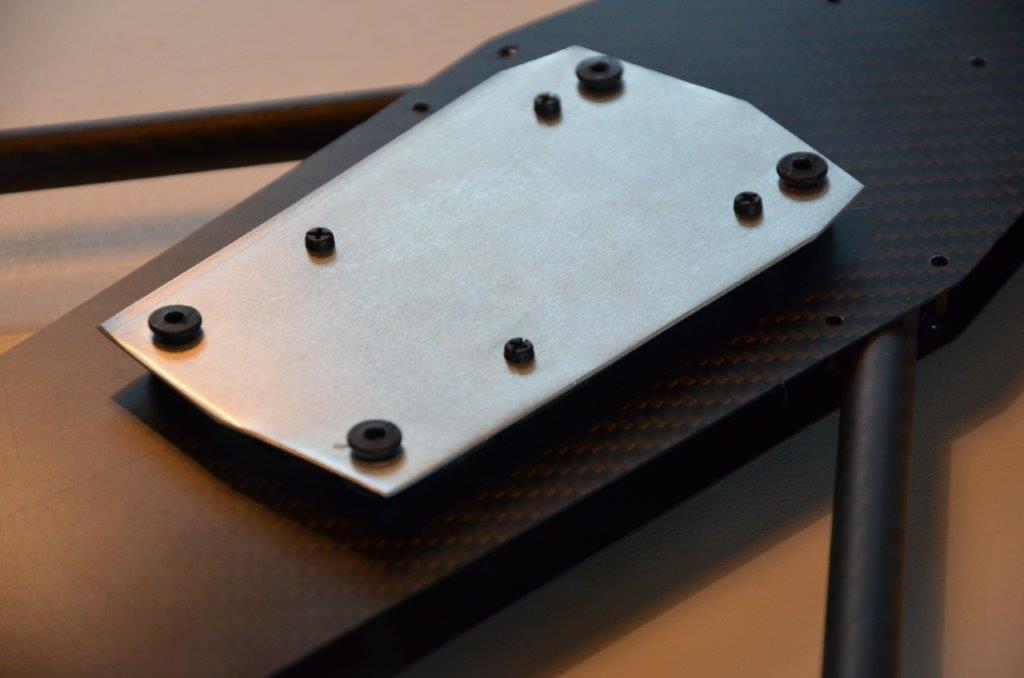
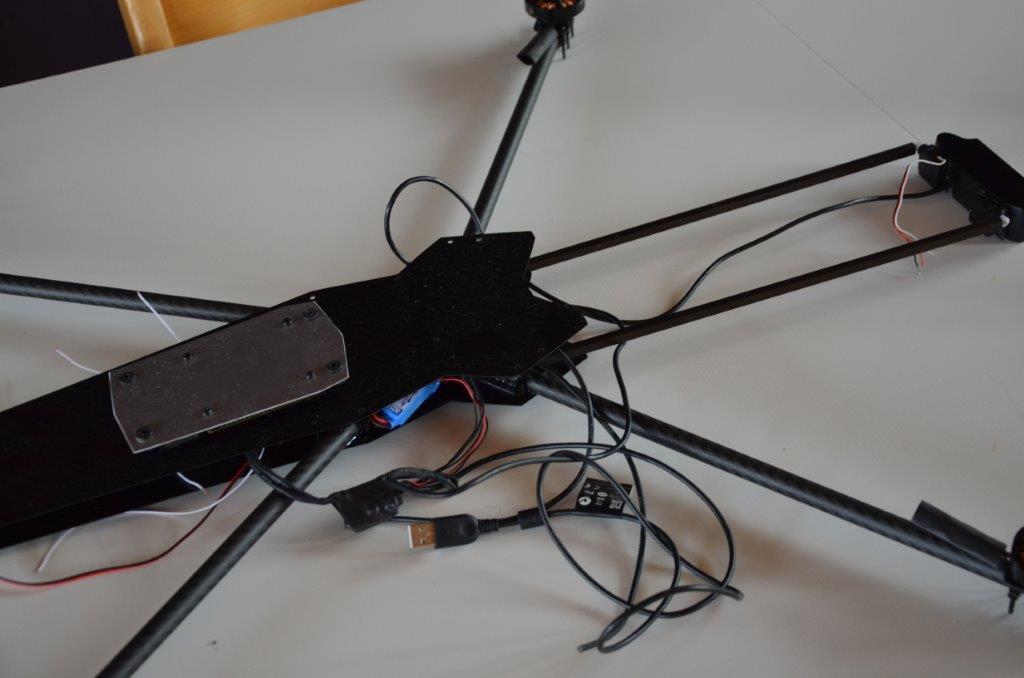
0.5mm CF twill sheet (cut with scissors, and some sandpaper)
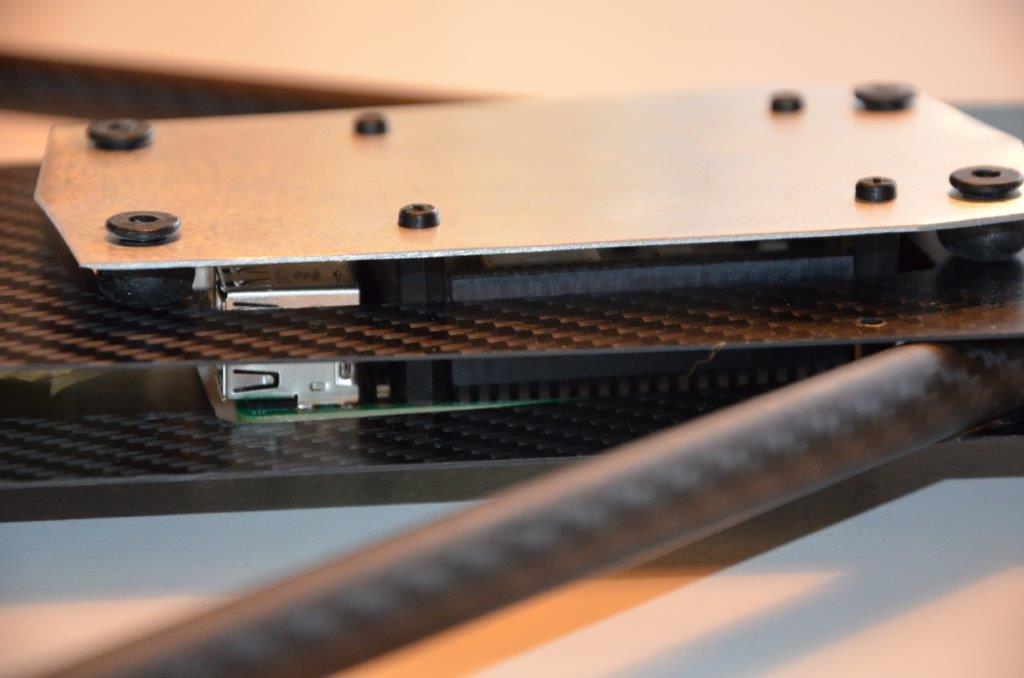
12x10mm CF 3k twill tubes
M3 bolts and tube clamps etc.
Digital Servo for camera tilt
Digital Servo for hook, (planning on lifting a RC glider)
It will be controlled using Mission Planner and a joystick
Mission Planner is connected through a 4G internet connection
Video is streamed over the internet connection using GStreamer
A script on RPi will poll a “proxy” server running on windows Azure
The purpose of this is to make the system more robust against 4G re-connections and IP changes (both PC and quad) It also enables me to control key functions of the the quad from any internet browser ( like my mobile phone )
It turns out the 4G modem has a REST based API I can call from RPi to report back 4G signal quality and strength.
This data will be posted to the Azure server. The start/stop of the video etc. will be controlled through the same server. I will also be able to change video quality in the air, depending on connection quality. (I’ve already have working prototype of this setup.)
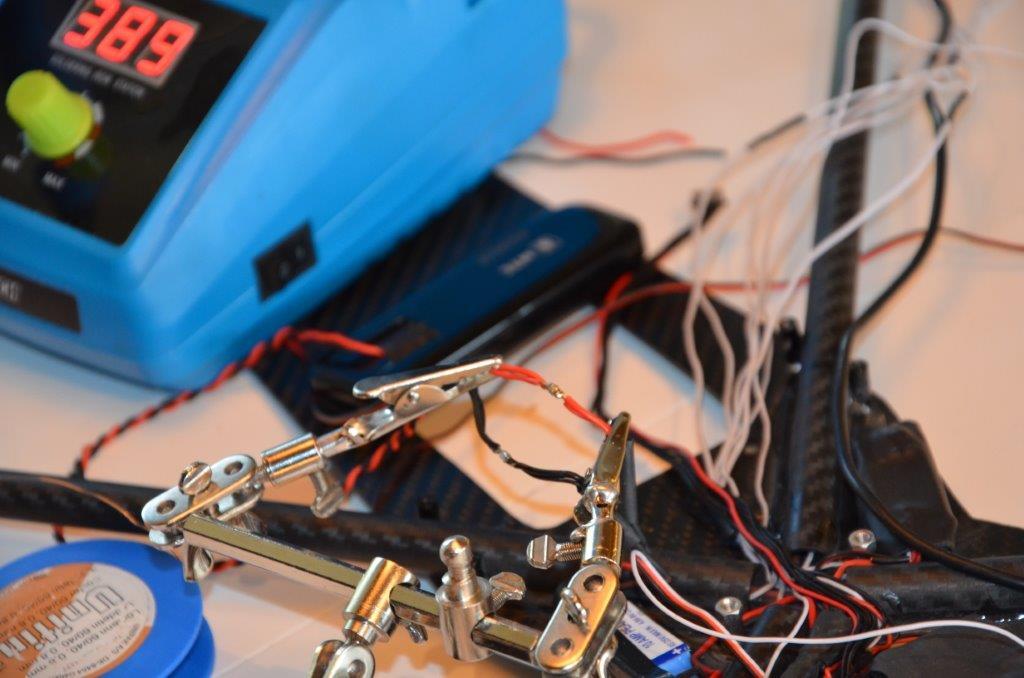
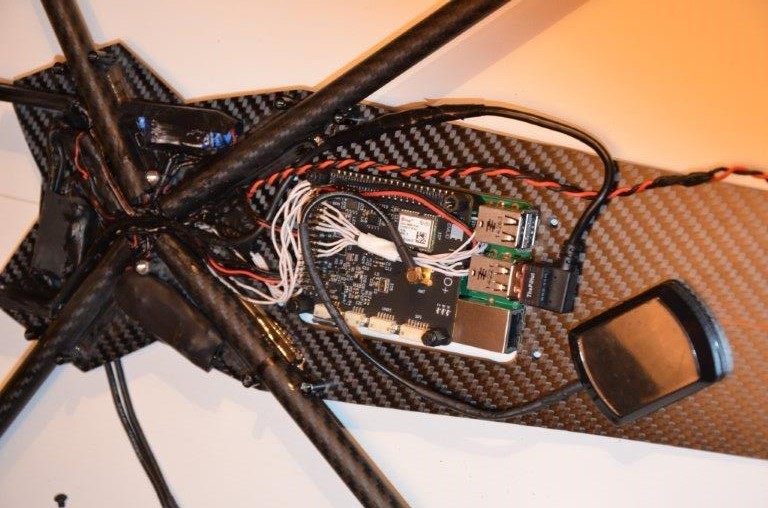
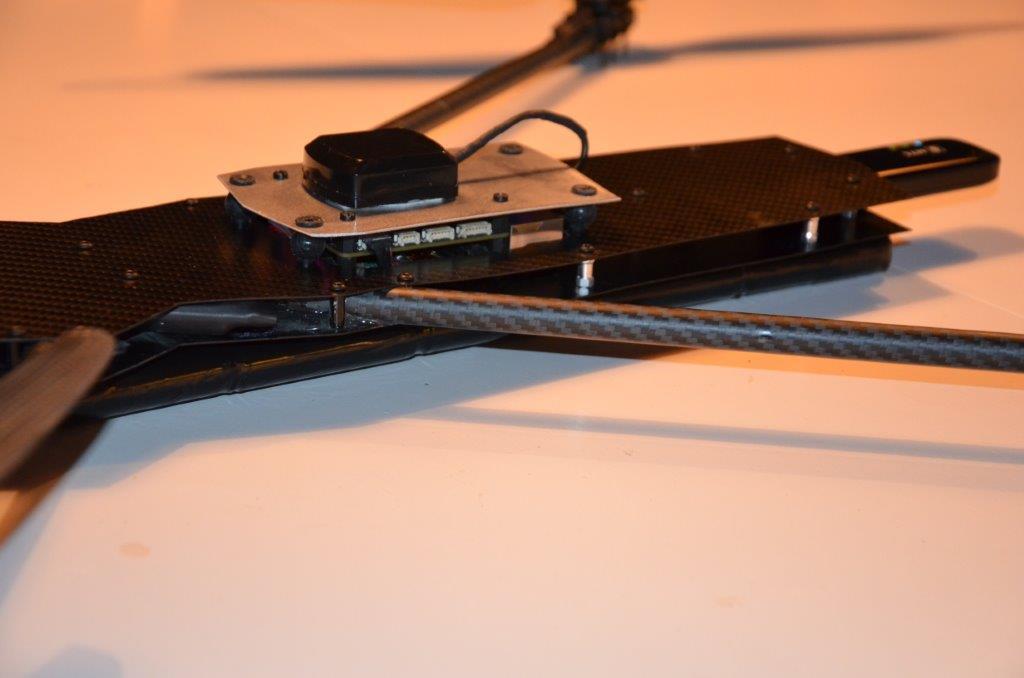
Her are some pictures:


to be continued… 











 Seriously though, I have only seen one such product and it was like $2000 for one charge pad. We need something affordable and that can be deployed easily and something modular we can put on any drone landing skid.
Seriously though, I have only seen one such product and it was like $2000 for one charge pad. We need something affordable and that can be deployed easily and something modular we can put on any drone landing skid.