You are correct, for proper level arm correction it’s necessary to provide mounting distances and also IMU data (twice is a gimbal is used). My bad, this is not a discussion related to Studio Beta…
However… we wan’t IMU data in the reach series!
cm-level accuracy obtained from PPK-RTK antenna position will be degrated to 5-10x larger, or even worse, error in camera position estimation without proper
Documentation for Emlid Studio shows the basic workflow but does not go into the settings at all (at least not that I can find anywhere). I think it would be very useful to see more documentation on how different settings should be used in different scenarios.
I’ve been meaning to ask this question. How do you account for the camera offset distance from the antenna phase centers ? Is there not software for this ? I hear all about cm accuracy of drone imagery buts it’s offset from the antenna phase centers in x, y and z. Unless this is accounted for there is error in the true positions of the imagery. Does RTKLIB not account for this or have offset parameters ?
The lever arm offset is just a small step toward the final solution and is preferable added in a dedicated software that could handle all variables. Like offset between IMU, antenna, fuselage, camera sensor etc. Runing tight coupled/closed loop, PPP, RTK, PPK or singel scenarios is highly influence by any offsets, e.g the error report might miss out on important data if offset has been applied earlier on. Also not forgetting boresight calibration
There are also levels of accuracy in how much gear is used. E.g not all use IMU but just run a process to compute trajectory between two points (simplyfied) and the interpolation would guess the line there.
So yes, other programs handle lever arm offset and fix all misalignments for you.
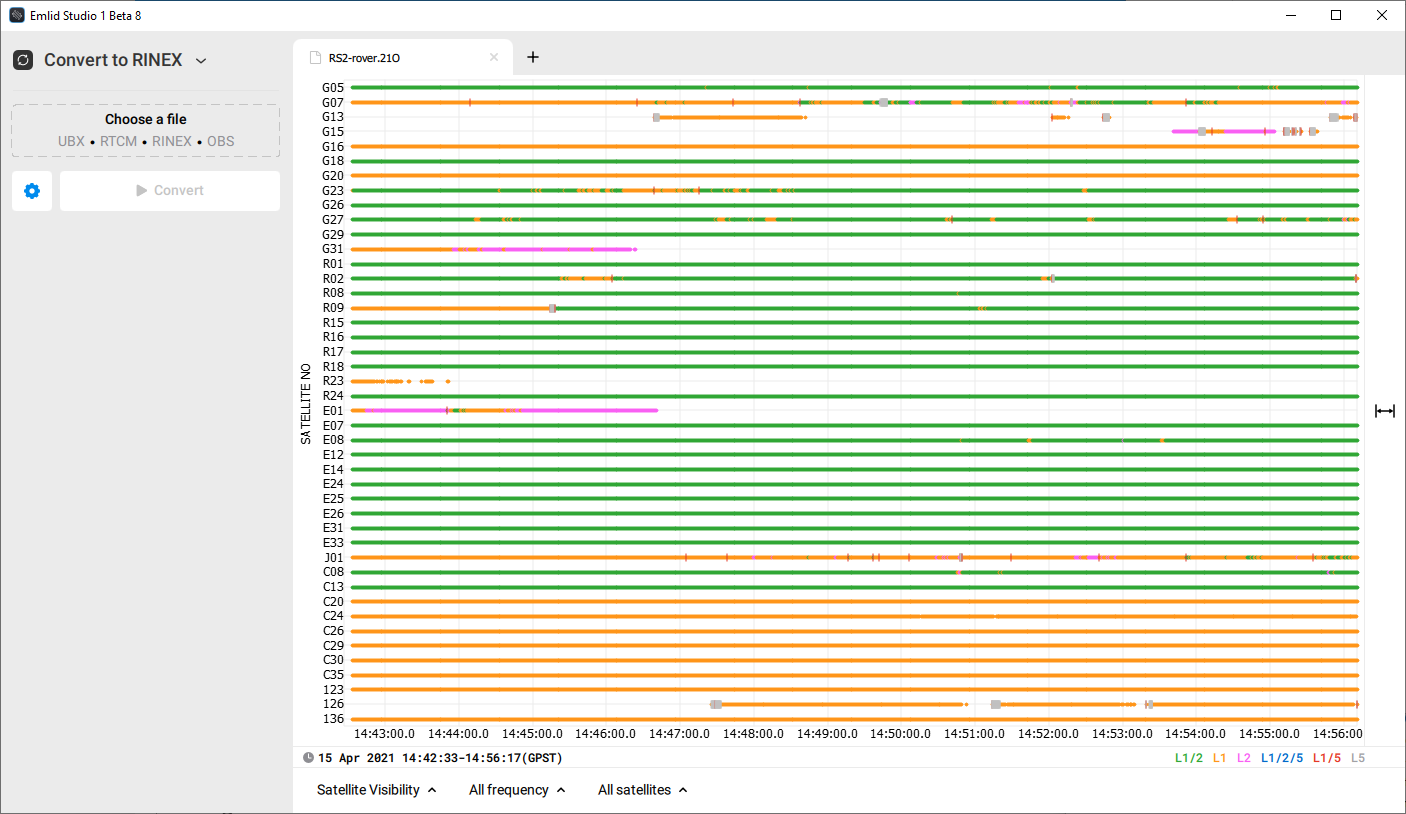
I downloaded the rinex (1 fiel per hour) from a serer and the data are in lunux format (Z extension) so I have to unzip using Hatanaka software.
Anyway now I fount the correct hour rinex and the Studio works fine.
Sounds reasonable, and IMU support is in our roadmap. However, I also agree with @TB_RTK that IMU values don’t do all the work. Orthorectification is a complicated algorithm, and some software allows getting centimeter-level accuracy without IMU values as well.
HI!
Could you please describe the issue in more detail? Where the .pos file appeared and where should it be? Did you convert the UBX in the background?
the issue is where you select a RINEX log file in ROVER field (either already converted from UBX, or just a RINEX file).
therefore In seeting window If I set result folder = input file folder , EMLID STUDIO won’t suggest me the input folder…
The v1-beta-8 with reworked plot style and improved drag&drop functionality is ready to download! We have updated the colors, removed the coordinate axes’ origin, and made the points more rounded. Also, the vertical axis labels are now aligned.
Marker name is added to RINEX conversion settings.
Converter now adds iono correction and time correction to the RINEX nav header.
Plot drag&drop support is extended: drop a file anywhere in the plot area to open it in a new tab, press the Shift key to add a new layer to the current solution plot or replace the second one.
Changed:
The behavior of the Done button is changed.
The plot has become less laggy and looks sharper on DPI displays.
The plot style is reworked.
Fixed:
Error during the installation process with unexpected exit code 3010 is fixed.
If we are manually entering an OPUS solution for the base do we still want the (broadcast?) iono and (SBAS?) tropo corrections?
Is it recommended practice to use the “X/Y/Z ECEF/m” format to enter the corrected base coordinates or could you add an option in the Base pull down menu for “Lat/Lon/Height, dms/m”?
Will you be adding a field for a Precise Satellite Ephemeris/Clock corrections or is this already automatically taken care of when possible? This is important for our longer base lines.
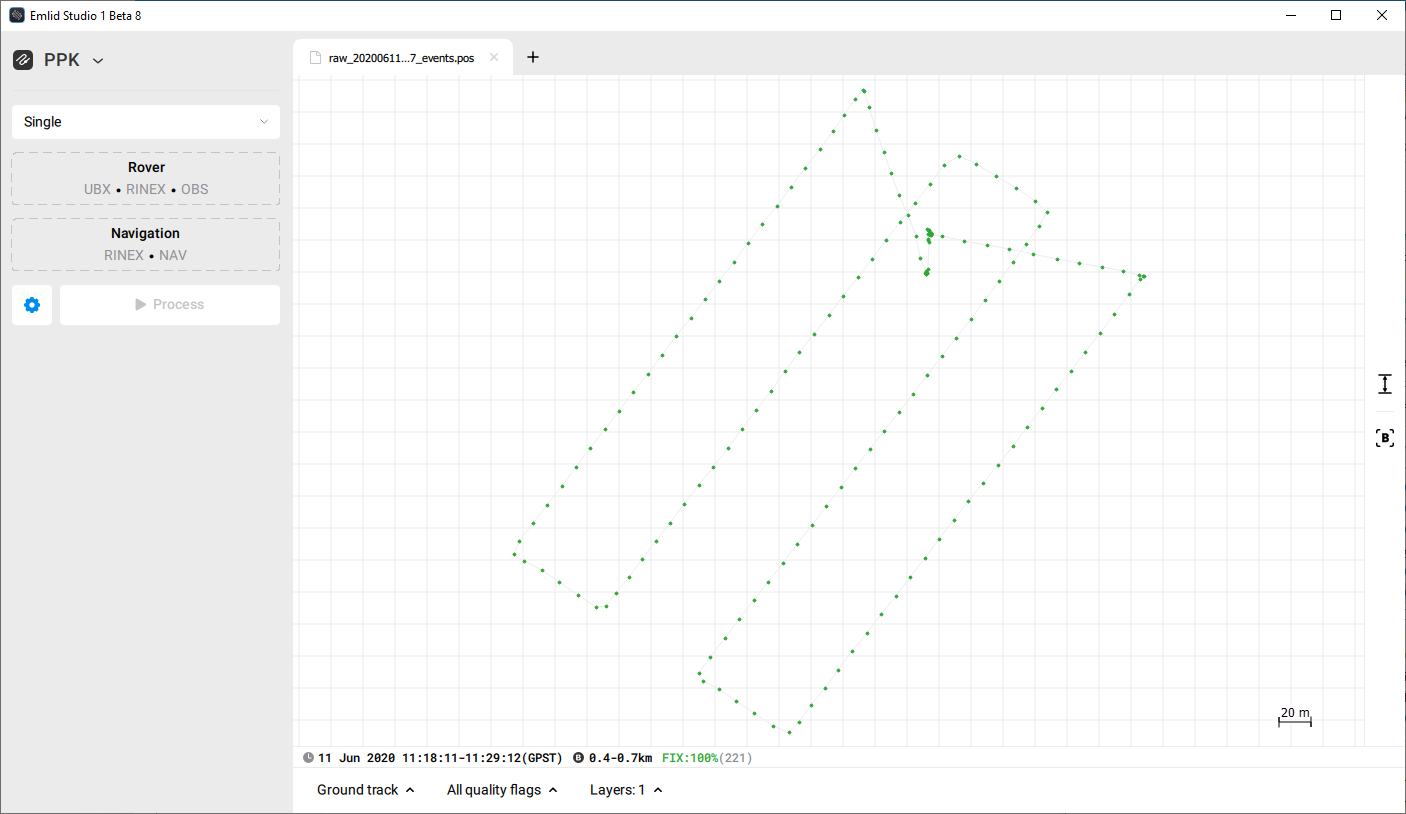
Finally, as a comparison I processed a survey using both Emlid Studio 1 Beta 8 (ES1B8) “Stop & Go with RV3” and the latest Emlid RTKLib release using the same parameters as far as I could tell.
When looking at the solutions in RTKPlot the .pos file returned from ES1B8 was 100% Single and the solution directly from RTKLib processing showed 21.6% Fix, 71.2% Float, and 7.2% Single. In the ES1B8 solution N=55093 and the RTKLib solution has N=48481. What does the “B” parameter at the bottom of RTKPlot between these other values mean? They’re also quite different between solutions.
Thank you for putting in the time developing this software!
Thomas
These are different things. Using base coordinates from OPUS provides you with absolute accuracy. Tropospheric and ionospheric corrections help eliminate signals disturbances due to going through the atmosphere.
There is no specific recommendation. We’ll add that.
This request will be noted as well.
What does the “B” parameter at the bottom of RTKPlot between these other values mean? They’re also quite different between solutions.
It shows the baseline.
If the .pos file has a 100% Single solution, it means corrections weren’t applied. Can you share the files? I’ll check what’s wrong.
Hello everyone!
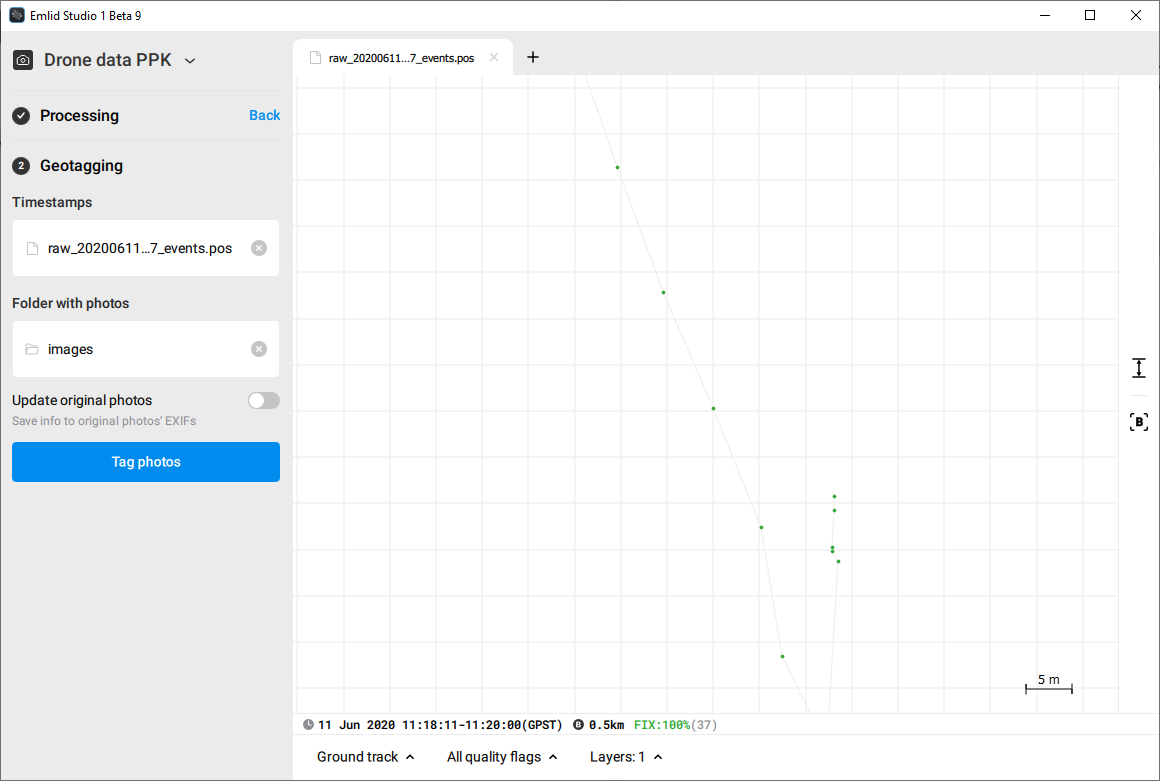
Check out the new Studio 1-beta-9 with drone data PPK mode!
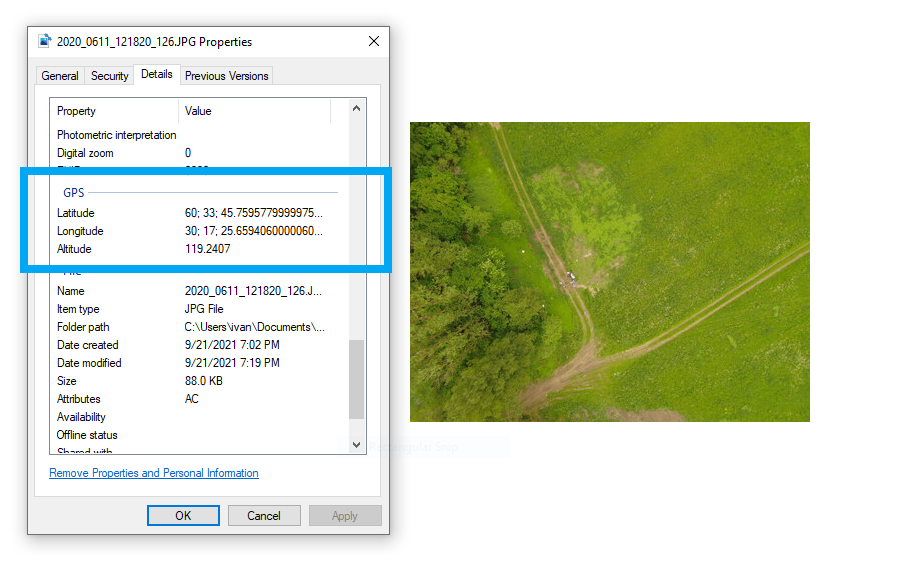
Now Studio can add coordinates to images’ metadata. All you need is events.pos file and folder with photos. events.pos will be generated during the Processing step but if you have this file already then skip Processing and proceed to Geotagging right away.
A brand new drone data PPK mode has been added! It enables you to tag all your drone photos with GPS coordinates and timestamps from logs of your receivers in one go.
Antenna height units support is added. Now Stop & Go handles both metric and imperial system units correctly.
Error popups now have a message with the information about the error. A report for Emlid support will be created only in case of internal error.
Changed:
The Stop & Go panel is reworked to the two-step workflow just like the drop data PPK.
This is the update I’ve personally been waiting for from the very beginning of Emlid Studio
And our team worked really hard during the last month to finally deliver it to you.
So now I hope to see your orthophotos made with the help of Emlid Studio—and any feedback that helps us to make it even better, of course!