I am using edge firmware v1.5 and Ardupilot Multirotor v3.5.5.
I am getting low range with my drone, losing connection at arround 300m from base at 120m height. I guess antena placement on both the drone and the ground station are okay, RF enviroment is okay (I tried different locattions).
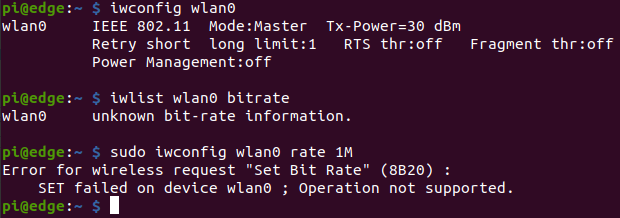
I have checked that the onboard Tx is indeed at 30dBm power, both according to QGroundControl setup and SSH acess, so now, I think that If reduce the bit rate I could extend the range.
However, as you could see at the following print, I couldn’t:
The range you’re achieving looks rather short. Please share the photos of your setup so that we can check if everything is configured correctly. Additionally, it’d be great to see the DataFlash logs: they’ll allow us to review different parameters that might affect the range.
The datalink antenas are in down vertical position on those photos, but for the flight they were in inverted V position. On the ground, the datalink were placed on the laptop lid, V-position, as recommended by the official docs. Clear line of sight between drone and ground station at all times.
@gm2gabriel
You could check the connection speed/bitrate from/to your copter on your GCS laptop. Both Linux and Windows should show it in the connection properties. If I remember correctly the Emlid Edge sets it to 802.11a speed (54Mbit/s). The lowest bitrate 802.11a supports is 6Mbit/s, so setting it to 1Mbit/s will not work in any case. Any setting always sets the nominal bitrate. The useable bitrate will be lower than this.
I would also mount the wifi adapter vertical, to bring the antennas further below the copter. The active part of the antenna is only about half of the outer pipe. I would also make a bracing mount that fixes the antennas to the copter frame or the wifi modules case. The forces on the antennas from vibrations and wind might damage the wifi modules PCB.
Thanks for the advice! I will try to follow your recomendations concerning the wifi adapter and antennas, I will also try to verify the connection speed and lower it, if possible.
For a sanity check, I have ordered a new couple of AWUS036ACH adapters.
Did you had time to see the logs or investigate de problem?
Changing both alfa did not improve the range at all…
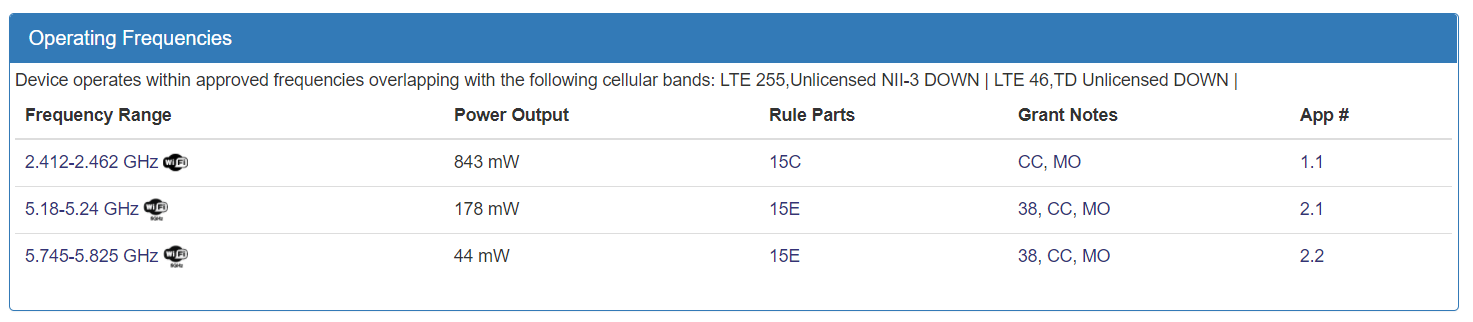
I would like to change the edge configurations to use AWUS036ACH in 2.4Ghz, instead of the default 5.8GHz. Do you have any documentation concerning that? I guess the 2.4GHz can easily handle video stream at a much higher range, not only because of the frequency, but also because of the higher power:
The frequency for the Wireless data link on Edge is within the 5.180–5.825 GHz limits. There’s no easy way to change it on the device itself. As the Edge is designed for easy video transmittance, this bandwidth seems highly appropriate to ensure an uninterrupted connection.
Regarding the range, currently, it’s hard to tell what could lower it. Could you please double-check that the antennas are placed properly? This guide can explain how to place them. It’s also important to make sure that the connection from the GCS’s side is configured through the external Wi-Fi module and not the internal one.
The wireless data link is a dual frequency kind 2.4Ghz or 5.8Ghz (however, not both at the same time). Correct me if I am wrong, but I guess there is no need to change or modify de device itself, right? But to change the Acess Point configurations (or any other protocol used) of Edge itself, it’s a software job/issue, right? I am willing to dig into the raspbian modules, so any advice, expert orientations of documentation is welcome.
I also own a navio2 and will try to setup telemetry and video using this same AWUS036ACH hardware in 2.4Ghz, both air and ground module, analogous to Edge.
I have triple-checked my assembly and antennas placements, I even tryed brand new AWUS036ACH. On youtube I have seen range demo videos, could you share some external photos of the drone or other successfull designs, please?
As Edge expects the data to be transferred via a 5 GHz network, it can hardly be changed. As I’ve mentioned before, we don’t recommend reducing this frequency as this is the most stable configuration for video transmittance.
With the range issue, I suppose it may help if you could reconfigure the device from scratch. This way, it’ll be possible to control each step of the setting to make sure they comply with our Quickstart options. The range issues may be provoked by the environment as well so it’s important to check it as well. In case it doesn’t help, please, share the telemetry logs from your device once again so that we can take a closer look.
Regarding the RSSI failsafe values, they are not described exactly as they are configured with the percentage of the received signal. It’s indeed possible to operate with the Low and Medium values only. You can find more information about it in the QGroundControl ArduPilot’s safety guide.
Regarding the examples of the projects, I can recommend looking through the following threads from us and our users: