I am a newbie in working with navio2 and i want to do a personal project on a quadcopter. But i am having a hard time understanding how i could run a script on the board. I looked into dronekit and the python programmes found there and i tried to connect via mavlink. But all the tutorials i followed did not work, because it always gives connection timeout.
Could anyone, please, explain to me how can i run a script on navio2 and also see the result in Mission Planner?
Thank you very much for the response.
First of all, i have a question regarding the workflow.
So, basically, what i have to do is to go into my raspberry pi via ssh, and run: mavproxy.py --master:udp:pi_ip --out udp:pi_ip:14550 --out udp:pi_ip:14551
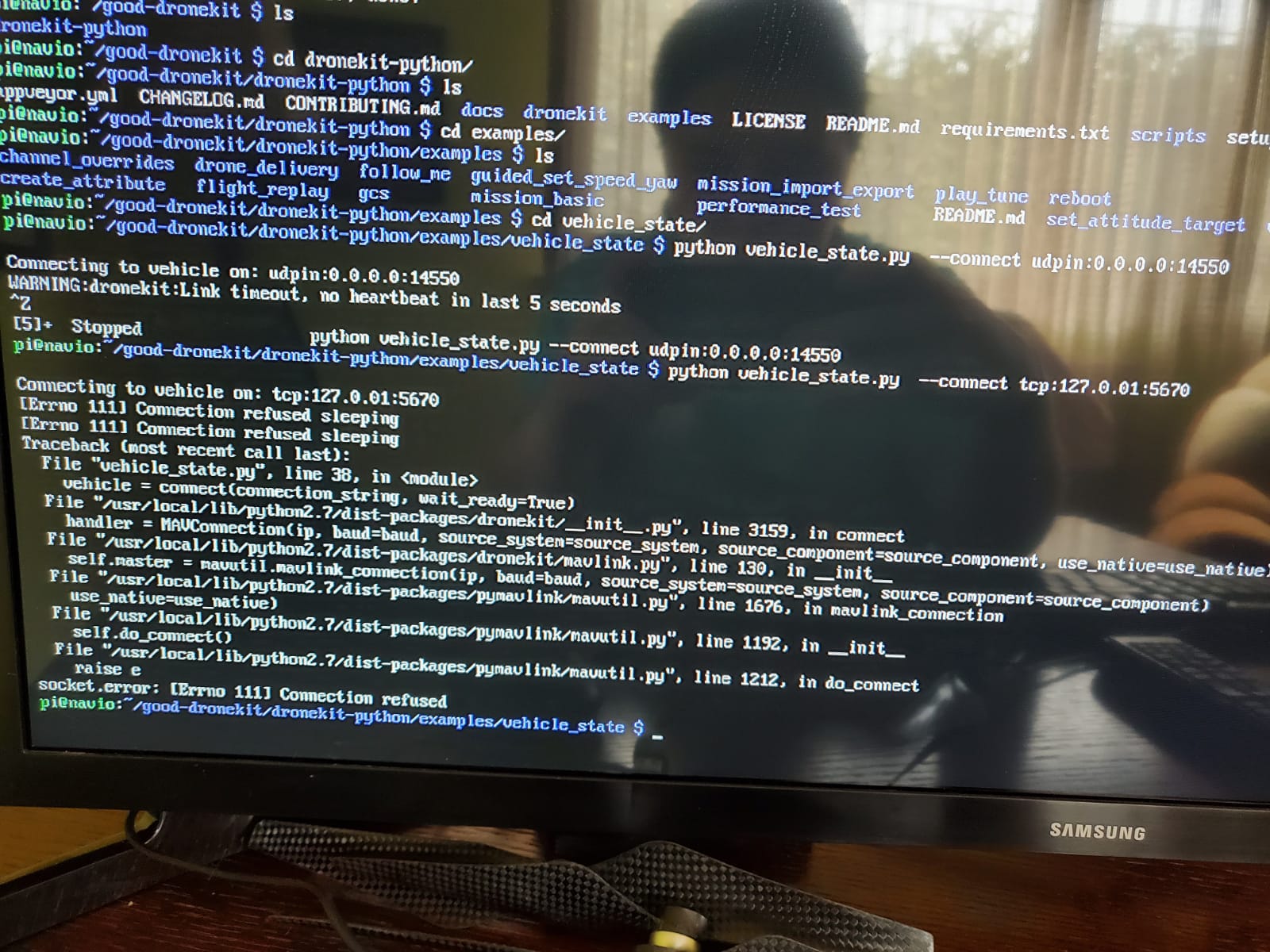
then go to my laptop and try to run, for example, python vehicle_state.py --connect udp:pi_ip:14551?
and mission planner should connect to udp:pi_ip:14550
Also, for being able to run mavrproxy, do i need a telemetry module plugged in the UART slot? note that both laptop and rpi are connected to the same network
And if i do all of these above, this is what i get(even though the firewall is off: connection refused, no hearthbeat.
Sorry for asking so many questions, but i am dealing with this problem for over a month and i really need to get this fixed in order to move on with the project. Even though i searched all the Internet, it seems that everything i try to do, does not work.
Aaand, yes, the image is updated.
Thank you very much!
We have a brief guide on how to connect to your GCS via mavproxy. You can find it here. Generally, you will need to use the following command for connection:
To learn more about working with Dronekit, you can use their detailed wiki. For running the example, I suppose you would need to change the IP address for loop one, like this: