I am trying to connect my windows 10 laptop to my drone via 3dr telemetry modules. I successfully connected Mission Planner but I also want to have connection to the RPi terminal via Putty. I set putty to serial and 57600 baud rate as MP has it, but I am receiving garbage. Can anyone help me please?
if you have one serial link and ardupilot uses it for telemetry, you can not use this link for anything else. What you see in putty as garbage is the mavlink telemetry.
A serial link is not like a network connection, where multiple applications can share the connection by using different ports.
Do you see a way to connect another telemetry to the navio2 so I can communicate with the RPi separately from MP? My goal is to code dronekit scripts for semi-automated missions that will utilize computer vision via the attached Pi Camera but also allowing for user input to change the mission on the fly.
You can stream video and access the command line of Navio2 using a Wi-Fi connection. However, it will require a good Internet connection. I’d suggest taking a look at Karl’s comment in this thread regarding live camera usage and object detection.
actually, you don’t need an internet connection at all. Just a WiFi router to link your drone to your GCS.
Now I know lots of people out there can’t fly near their home for various reasons. Needles to say away at an open field there wouldn’t be a WiFi connection available, but here are three options regardless:
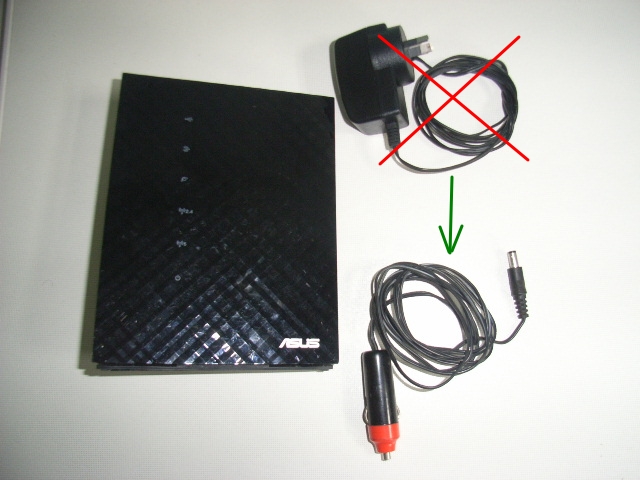
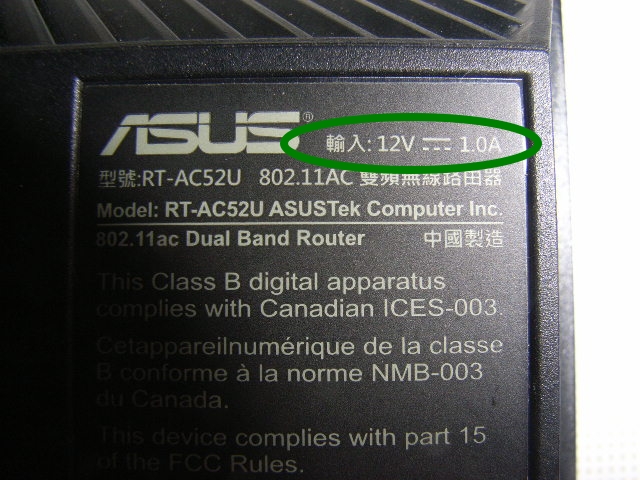
-If you really want to use WiFi you can use a spare Router and as most have a plug-pack attached to it simply replace it with a 12V cigarette lighter socket cable for your car. ( But you need to check first if your router is actually running on 12V - check label at rear & or label on plug-pack)
-You could use a 3G or 4G USB wireless broadband modem. In that way you can make use of the mobile phone network (cell-network) instead of WiFi - (providing there is a signal where drone is flown)
-Finally, you can install a virtual router software on your computer / tablet or whatever else you are using for your GCS. This will simulate a router and allows direct connection to your drone without any additional hardware. - However, some devices out there have a rather poor WiFi module installed and hence have a shorter range compared to a good WiFi router.
Thank you for your responses guys, but actually, I will transfer the video from the RPi’s comppsite video out and relay it to GCS via a video transmitter on the drone. I think 4G modem will work well to access the command line but I would also like to know if I can use a separate radio to do this?
The 4G connection allows for both, telemetry and video with low latency - providing you got a reasonable fast connection.
(Some mobile internet providers will limit data speed on pre-paid and low cost services)
Whist you certainly can use a different transmitter I would not recommend it for following reasons:
More transmitters = more possible interference with other close signals like telemetry.
More transmitters = higher likely-hood of problems with interference affecting FC
Limited Range - from my own experience I know such transmitters usually only work well within 50m or so. But 4G could work even at the other end of the world providing you’ve got signal reception.
Legal Problems - Many countries have legal restrictions in regards to transmitter power. Whilst there are stronger transmitter out you could get yourself into trouble if you get caught using such a device - Check with your local authorities.
Also I read in some places that SiK radios can be used to make regular links and I have 2 pairs. 1 pair is connected to UART port and gives me connection to MP. The other pair I can plug into the USB port of the RPi using a TTL-Serial-USB converted or FTDI? and access the terminal like so? With this setup, I would have 2 ground modules in the laptop and 2 air modules on the drone. I managed to get a connection between the air module plugged into the FTDI into the USB of the RPi and the ground module plugged into the laptop (solid green light on both), but I can’t make a serial connection using Putty…
a) SIK radios have limited range. If you are just after 100m or so then yes, could be used.
b) Sik radios are only useful for telemetry or other more basic form of communication. - Hence not suitable for video.
c) By default any SIK radio you connect is “taken over” by the system in assumption that it will be used for telemetry and basic connection. If you wanted to use one of them for something else you would have to specifically assign that port I.e. USB for that purpose. - Something you would have to do within Rpi.
d) Careful what software you add. - Navio2 has its own specially modified firmware to run in real time. This is an achievement only accomplishment in the past 6 years or so. If you mess around by adding all sorts of software it can affect processing speed and hence the ability to sufficiently control your drone.
e) As mentioned in earlier post: More transmitters = more possible interference with other close signals like telemetry. Especially when using two SIK radios working on same base frequency ,…bad idea.
In regards to 4G connection there is only limited information out there.
Hence I’ve written my own instructions and have listed those somewhere on this Forum. Have look at below post or do a search for 4g information on here. If necessary I can dig that info out.
The range doesn’t matter to me right now and I understand that 4G LTE would be a better option to pursue but I want to stick to RF as this is for research and learning purposes. What if I use a different RF module such as nRF24L01 with a CH340T (TTL-to-USB) adapter and plug it into the RPi’s USB port and I’ll plug another nRF24L01 into my PC. Would this also be “taken over” by the navio firmware? Would I be able to access the command line of my RPi on my PC in this way?
I can not agree with Karl @anon31534460 on point c). You have to specify through the telemetry options which network or UART ports ardupilot should use. Any other ports are left alone.
If you put both radios on opposite ends of your vehicle and configure them with frequencies/channels as far apart as possible, it should be possible to use two sets at the same time. I have done it on a antenna tracker some time ago. You have to make sure to create two pairs of radios, settings identical for the members of each pair. Telemetry radios have a setting to optimize packets for mavlink frames. Leave one pair with this setting and set the other pair to raw serial.
And just to make sure, this should give me access to the RPi’s command line right? So in theory i should be able to write linux commands (i.e. ls /dev) on my PC’s serial terminal and it would list the RPi’s /dev as if I were SSHed into it?
You will have to enable a serial console (getty) on the telemetry radio set to raw serial. It should be /dev/ttyUSB0 or another number.
Use
“sudo systemctl start serial-getty@ttyUSB0” (replace “0” with the correct number).
To start the console on boot use “sudo systemctl enable serial-getty@ttyUSB0”