



Yes, and included with this the most important part for me would be saving the manual base position per project. When Manual is selected then a drop-down of the projects appear.
3 Likes
The main thing I want is the ability to start and stop logging via some sort of command interface. I’m trying to automate more of my workflow, and being able to start and stop logging without needing the website would be great.
My contribuition:
Mainly in case of use the M+/rtk with other manufacturer antennas, like: Novatel, Trimble, etc:
-
The hability to choose a calibrated model antenna from NGS antenna file (https://www.ngs.noaa.gov/ANTCAL/LoadFile?file=ngs14.atx), like we can do in RTKPost;
-
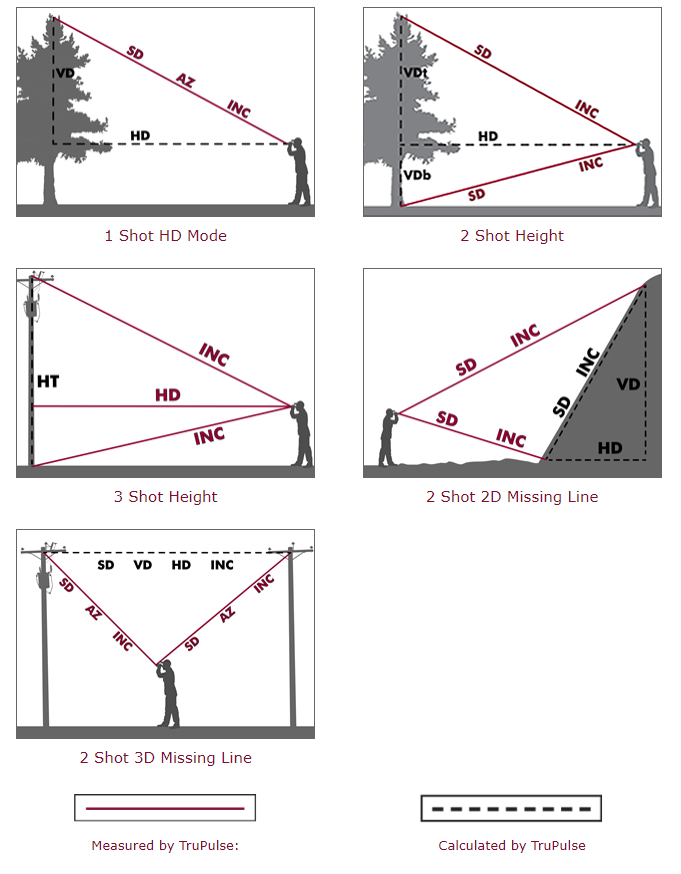
The hability to inform the slant height measurement ( ground point to ARP in the antena) and this inclined distance will be converted to a vertical distante automatically, considering the antena profile from NGS14.atx;
-
Today, the reachview outputs the main streaming comming from m8t in binary format via tcp port 5000. Hability to output this stream to the UART port, like we can do in the " Position" section.
Regards,
Thiago Tiedtke dos Reis
1 Like
-
Localisation for sure! There are many tools online, that can help you with localisation. You can build the database of keys for translations and we, as users, can add translations on our languages. I think many of us would be ready to do it.
-
Profiles for NTRIP input. Sometimes we are measuring outside our country and we have to input new NTRIP connection parameters. It would be nice to have an opportunity to save connection options and just switch between them.
-
And, of course, as many times was already requested - proj4string.
1 Like
Thanks to all of you!
These comments are noted as well.
1 Like
This is already possible. Explanation can be found in this thread:
3 Likes
Echoing others: Localizing, scale factor, offset, other datums, etc…
Extending the functionality of the LoRa to beyond just the correction message.
-
Send commands to connected devices from other device (rover back to base)
-
Can be as simple as power on/off, start/stop logging, but important to me is adjusting RTK base settings from rover without having to go back to my base
-
Swarm management (thinking multiple rovers controlled from one base)
When connected to internet ability to upload/download to and from server, cloud or FTP site. Upload survey or download existing data files for survey/ stakeout
Support for laser rangefinders like below to measure in difficult conditions and to speed up survey time. GIS/GPS Mapping - Laser Tech
3 Likes

It’s pure awesomeness;)
4 Likes

My wish list is to be able to use the software without having two extra devices to get it to connect. Hopefully emlid will add the feature to use the software on a phone offline and have it connect to the reach rs+. The reason why I got this device was to replace the trimble antenna. I guess for 6000 dollars more you can actually collect data without an internet connection
???
Did you try setting the ROVER (and your (1) device such as cellphone, tablet etc) into HOTSPOT mode?
1 Like
I think you need to elaborate on that statement. It is perfectly possible to collect very precise points without an internet connection
3 Likes
The fact that I can import the CSV and it has the description is fine. But it does not display any of that information anywhere. So I can’t see on the map if a point has a description of “Centerline” or “Shoulder”. It still only uses Name,Lat,long,elevation
3 Likes
It would be nice to allow for the upload of custom CSVs. If its a column on the CSV when uploaded you can populate the attributes during survey in the same form view.
Hey there,
Thanks again for your contribution! ![]()
Reach base already can handle multiple rovers over LoRa.
Could you please elaborate on this?
True for corrections but I am referring to sending simple commands to the rovers optionally as an individual, defined clusters or entire group.
Can you make RS+ or RS2 show solution status Fix, Float, Single by the LED lights on it? It is useful for surveyors to know the solution by the light for example, if they are using third-party app that use mock location.
4 Likes
RS2 already does that, it is very nice indeed!
5 Likes
Is it possible for RS+?