



When choosing the best survey workflow, the number of different options may overwhelm you. In this post, we’ll look at the difference between collecting points in RTK and Stop & Go with Emlid Flow (formerly known as ReachView 3).
Collecting points in RTK is the most popular way of working with a GNSS receiver. You need to place the base, configure the RTK link with the rover, and create a project in Emlid Flow. By the way, we have the video course about getting a centimeter-level accuracy in RTK.
Stop & Go with Emlid Flow is a method requiring post-processing. In the field, the process looks very similar to the RTK points collection, but there is no RTK link between the base and the rover. You collect points in Single to improve the accuracy afterward in Emlid Studio. Check the guide from our docs for more details.
Also, I must say that sometimes you have no choice but to work in PPK—if you can’t establish an RTK link between the base and the rover. For example, the Internet coverage isn’t good enough for an NTRIP connection, and at the same time, it’s impossible to place devices in line of sight to use LoRa.
When you aren’t sure if RTK works fine in your area, you can use Stop & Go as a backup method.
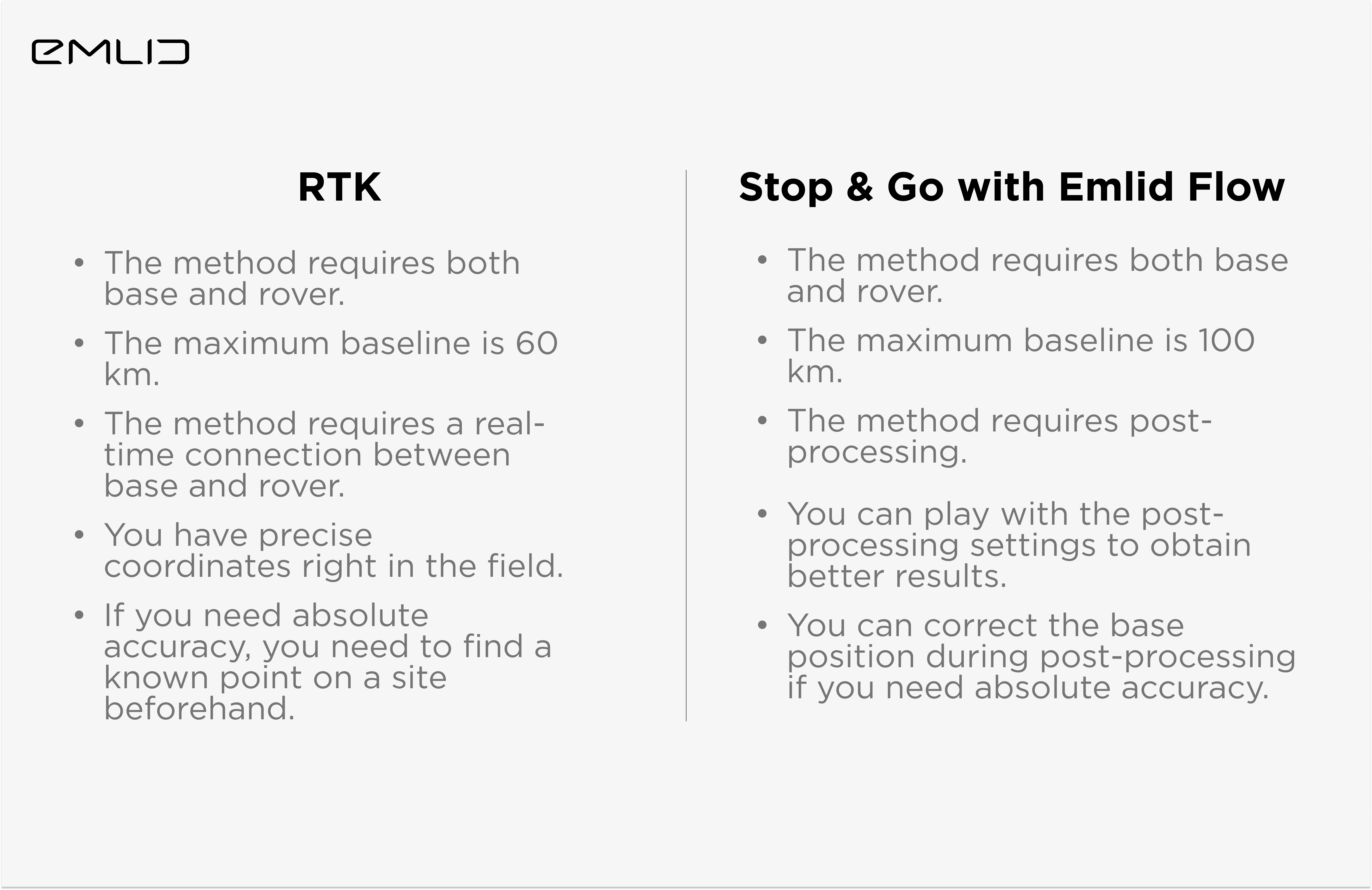
As you see, both these methods give you precise coordinates of separate points. So, you just need to decide if you want to work in RTK or PPK. How to choose? We prepared the summary, which should help you:
Let us know if you see more benefits in using one of these methods!
P.S. Don’t forget to check our previous post—Can I use PPP services or OPUS in my area?