on a cloudy day with rain - i got fix solutions for a long time - i was driving with my trekker using autosteer software from cerea. everything worked fine…
i was able to drive ± 2 cm on the road with 10 km/h with gps&glo , 5 hz, dynamics on, gps fix and hold, glo mode off.
yesterday i was testing latest beta of rtklib - and i am very happy to look forward to it!!!
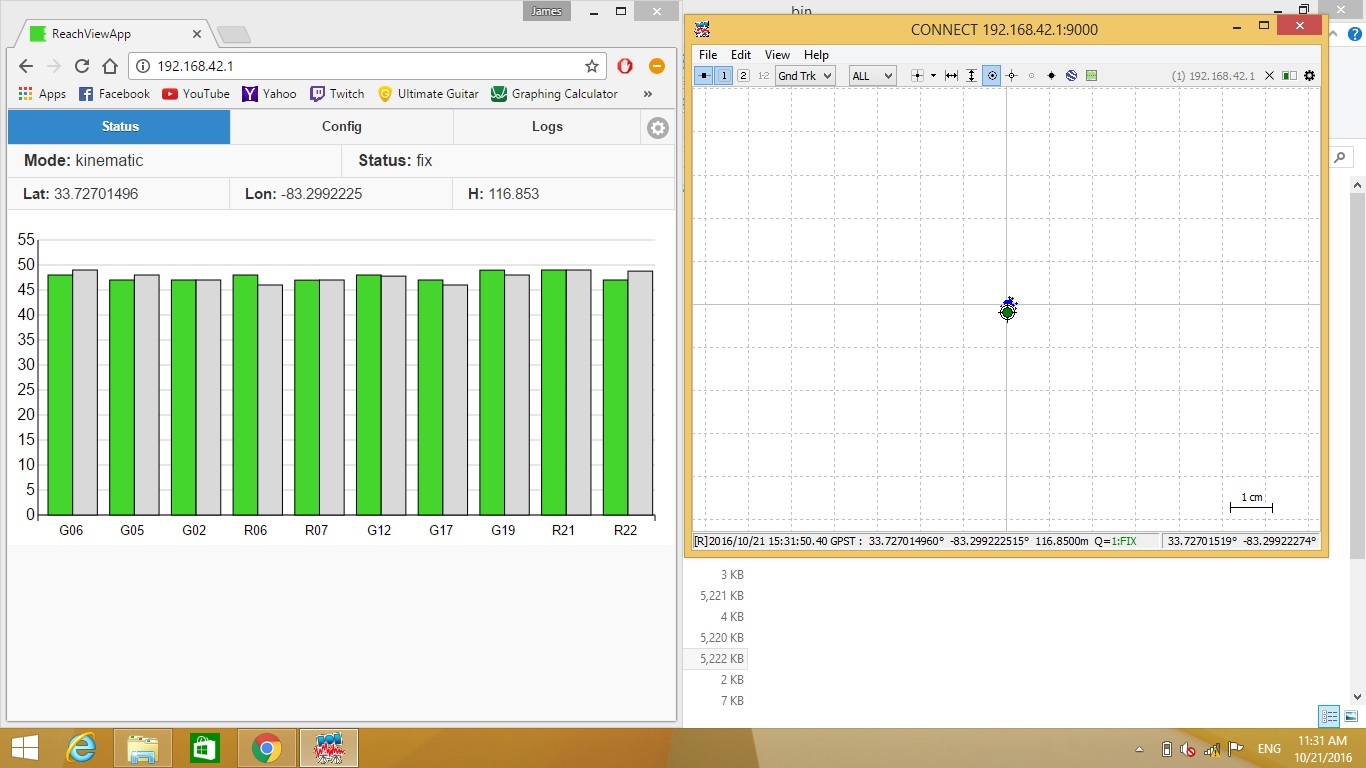
fix is getting faster - and the float solution ist holding better and very stable at one point.
i compared latest beta with 2.4.2.
at 2.4.2 during a stop the solution was always drifting away for ~1m- at newest is stable in ± 5 cm.
I guess the GPS antenna is located on the cab’s roof; in that case how to you compensate the cab rolling (left/right) in order to get a high precision (cm) at ground level?
i use mobile wlan hotspot - reach is connected to it - windows wlan is off (save data)
the gps antenna is on the front of the trekker. it is easier for the software to calculate the steering.
for cab rolling i use imu brick v.2. it is controlled by cerea autosteer.
I’m also busy to develop this kind of software (autosteering with electrovalves, and sprayer autosection) :
I also tried to use the BNO055 in order to measure roll/tilt/yaw, but unfortunately I cannot get stable measures (too much drift); The IMU brick uses this Bosh device BNO055; are you satisfied? which roll precision do you achieve? where did you locate the sensor ?
yes! i use reach with correction over internet. mobile modem on trekker.
windows tablet
cerea software
reach
imu brick v2
phigets motor controller + motor
active usb hub
…
…
about € 1800.-
I am testing at the moment.
The accuracy - I think is depending on a good gps signal. I did order two tw3710 antennas and hope for a better work with it.
The problem with standard antennas and driving between trees is i did not have enough satellites to holt fix .
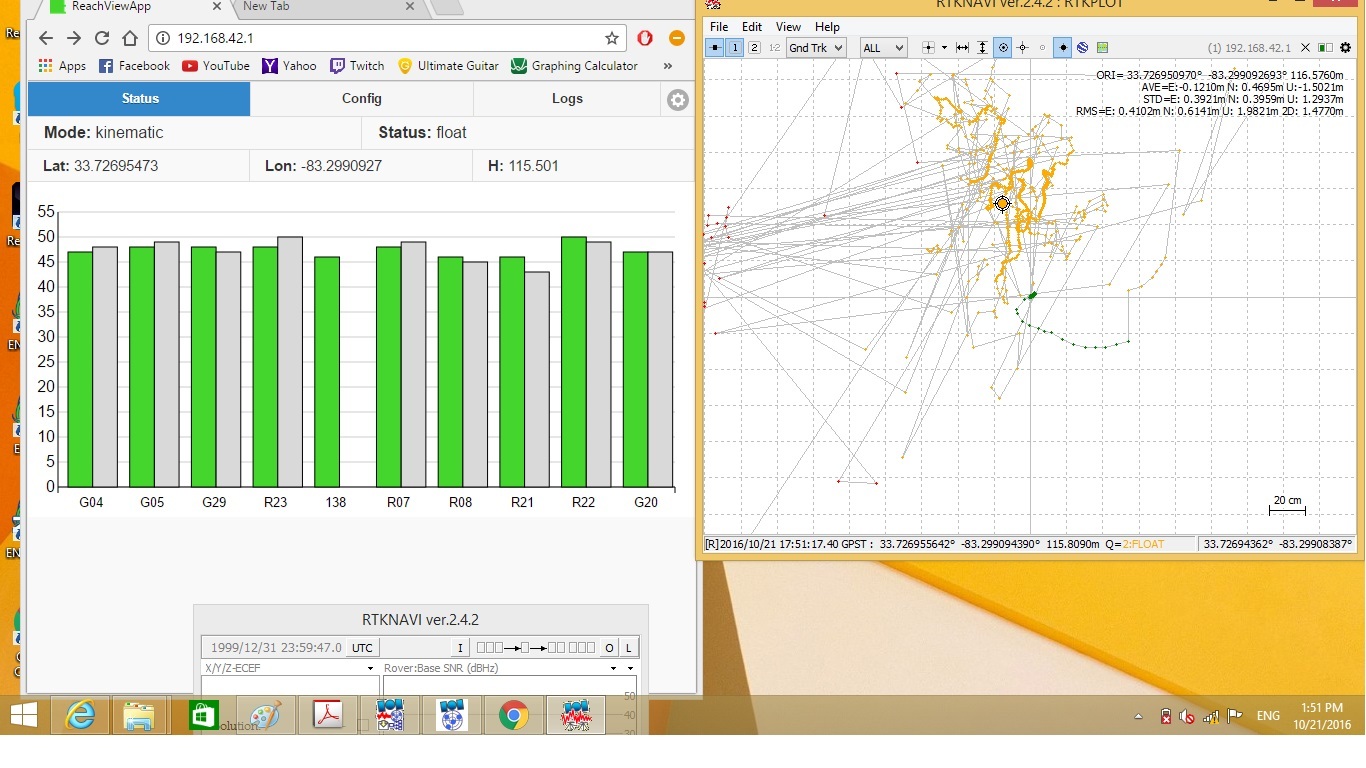
but when I moved the rover, it switched to FLOAT status (the following figure), although it had excellent satellite signal. And then stopped moving it, and waited for a while, it went back to FIX.