In support of Bryans excellent advice here’s an example that may help explain why longer observations are better.
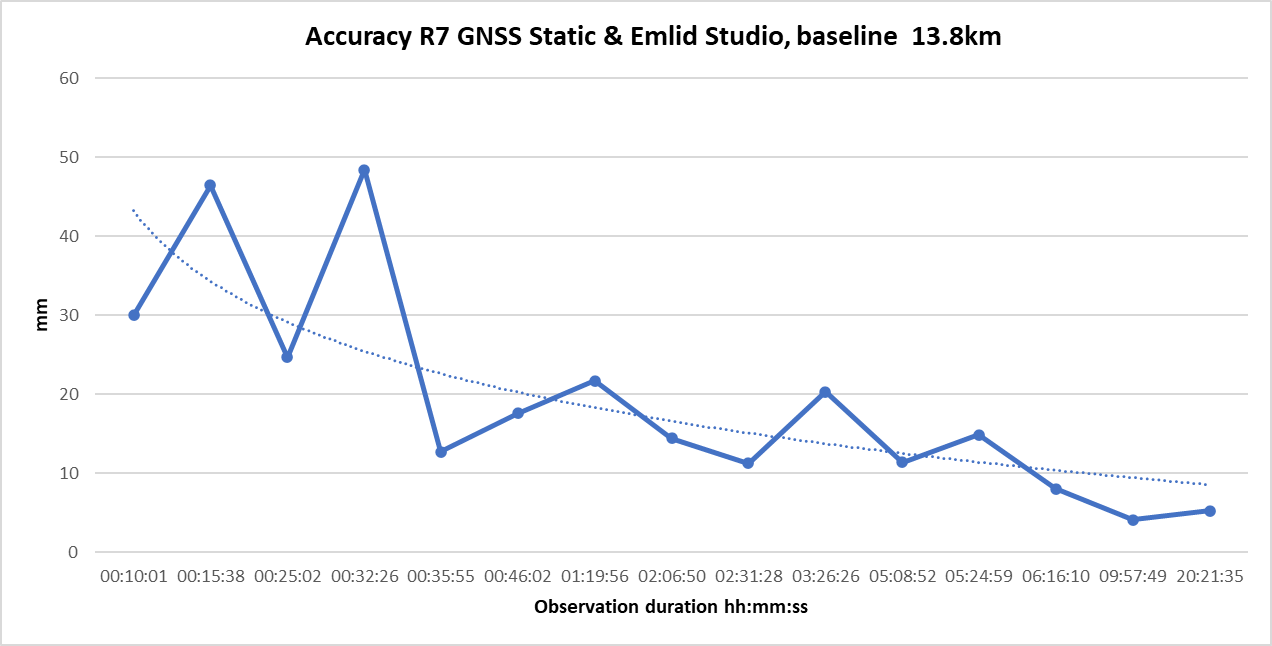
In this case it’s an evaluation I did of post processing a series of Trimble R7 GNSS + Zephyr 2 Geodetic static observations through Emlid Studio with a longish baseline. Your milage will vary but the curve is typical of anything GNSS.
You can see that in this particular scenario to get consistently accurate results (and under your 30mm target) takes around 40+ minutes.
That’s very interesting data. Am I right in thinking that the NTRIP solution (just rover) would give lower accuracy that a base and rover set-up? Assuming the same observation times of say 20 minutes? Or have I got that wrong?
In my opinion, static observations are best with adequate time on station. My opinion is based on many years of trial and error thinking the same at the beginning of RTN’s that short observation times were okay. They are not optimal for precise work. With extra time on station, your positioning will approach 1st order accuracy and match existing NGS passive stations.
If performing low order work or positioning, short observation times are okay I guess. BUT, I always take the view if you’re on station for 5 min why not stay on station for 10 min. If on station for 10 min why not stay for 20 min ? I realize time is valuable in a project but extra time WILL guarantee a precise position and will not cause issues in the future. In fact if needed, your previous project could provide control for you next project. Also, always try to have a local base logging onsite if possible. This will save you time and money.
LEARN PP capabilities. Wether it’s Emlid’s Studio or commercial PP software, this will help in establishing your positions and you can see your error in closed loops. Emlid’s Studio only provides single baseline processing but does not have multi baseline processing. For the price of a new RS3, you can have a good commercial PP software such as Javad Justin 3 with multi baseline and closed loops capabilities.
We have a large county wide data net of basically all our projects we have done since the early days of GNSS even including terrestrial traverse control from the 70’s though the 80’s to the first days of GPS NAVSTAR. We usually make ties to old networks to verify existing and new established positions as well as making ties to local NGS passive marks. This helps us to save time tying future boundary or control nets .
With a little extra time on station, as well as a local base onsite, you will have confidence in your positions as well as accurate data compared to your local NGS control.
If u decide to add another Emlid, get a RS3 with TILT as a ROVER for that extra convenience on projects u may need it for. For critical projects turn OFF tilt for maximum accuracy. Use the RS2 as a BASE via LoRa for maximum accuracy also. You also have the option to receive UHF radio to the RS3 when that need arises via high powered UHF radio “added” to BASE or from some other UHF capable base.
Thank you, everyone, for such valuable suggestions!
It indeed looks like external interference affected your solution. As Bryan suggested, you can check the models available online to ensure that the effect of the interference is at a minimum.
We have a support tip explaining the difference between NTRIP and your own base. With the same observation time, your accuracy shouldn’t be affected. But It’s important to set up the local base correctly. Another key factor is the baseline. NTRIP bases are often located at some distance from the site, and you can place your own base just next to the rover. That’s why the base and rover setups can provide higher accuracy in some cases.
Indeed - useful comments. I think that we did not spend enough time on each station. Minimum of averaging over couple of minutes at least. I’m still confused as once the unit is shoing “fixed” (with low PDOP and reported precision of 0.010 or 0.012) I assumed that meant it was close to cm level precision. Clearly, that is not always the case reading other contributions to this thread.
No, it’s not misleading at all. Any receiver with a current almanac and a last good position will provide a “fix” solution in 5 sec or less. Even in some high multi path areas an Emlid receiver will guarantee a good solution.as well as any other receiver.
They key is KNOWING when to rely on the “fix” solution provided by either Emlid receivers or other manufacturers equipment. An indicated PDOP below 2.0, good satellite view of the sky, numerous constellations, time on station, experience as well as GNSS measurement methodology will aid in deciding wether or not to TRUST a “fix”.
Users need to study and understand the basics in GNSS measurement methodology. Acceptance of an indicated “fix” solution is based on accuracy needed as well as the purpose. Any monkey can press a button.
As far as I’m concerned, Emlid’s products are as good as any high $$ receiver such as our Javad equipment. It’s the inexperienced users that need to learn to take advantage of Emlid’s quality equipment.
@EBE111057 this is really interesting and relevant - and not well documented (as far as I know).
Can I ask another question. If we compared a Trimble R12 say, against RS2, same conditions / environmnet, same fix time, same NTRIP server, would the Trimble be any better. My surveyor friend says yes for sure, but Im not convinced. Any thoughts???
Similar response to Bryans advice, like anything GNSS it’s not that simple and in particular in this case it would depend on the environment.
In good to mediocre GNSS conditions, definitely no. Emlid receivers perform extremely well.
The more difficult the environment, the more yes.
R12 has extremely advanced signal processing strategies that sense and compensate for things like individual signal issues and multipath that give it an edge in heavy tree canopy and urban environments.
But expect to pay something like 5+ times the price for the benefit of the receiver alone, plus an additional high cost for collector software like Access, and potentially office software like Trimble Business Center etc.
I have and continue to use both Emlid & Trimble recievers, I love both. Emlid is incredible bang for buck.
There’s no need to reiterate my above statement. A Trimble, Javad, Stonex, Emlid or whatever GNSS manufacturer have different specifications based on chip design/engineering and software design.
Is a Mercedes Unimog truck better than a tractor ? It depends. Same issue with GNSS receivers. There are different use cases for each.
For example, we use Javad receivers because they are, in my opinion, the best scientific receivers available for the professional land surveyor to guarantee a consistent and reliable position in a high multi path environment. They were designed and built by Dr. Javad Ashjaee, the leader and founder of the commercial GNSS industry.
I suggest you read the different receiver specifications that are produced by each manufacturer . This will indicate why costs of receivers vary so much as well as the different capabilities each offer.
I concur with @Wombo above, Emlid receivers are great receivers. They provide me and other land surveyors a low cost alternative. It’s the user that should have the knowledge to determine which receiver to use.
I don’t always need to have a $45K receiver for each project.