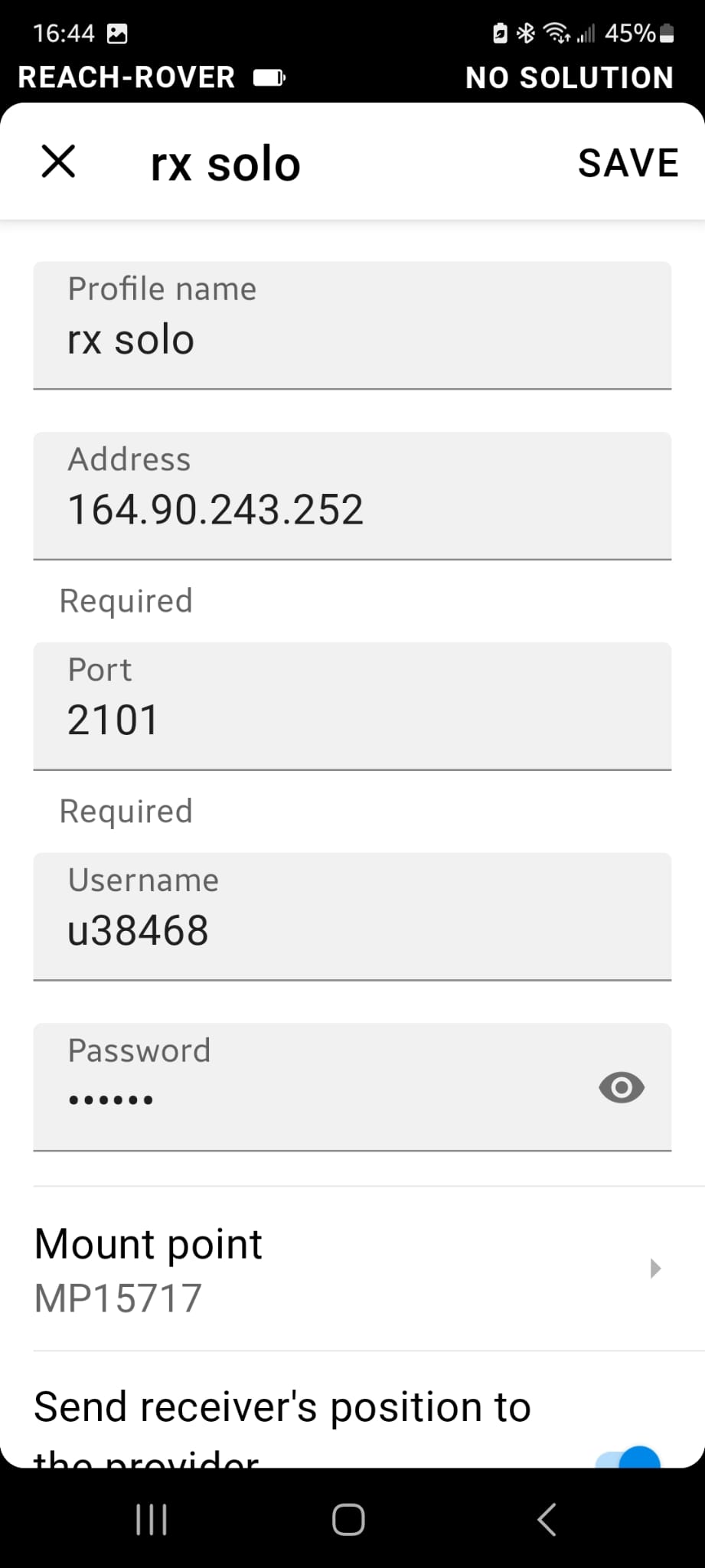
Detailed issue description. How does observed behavior differ from the expected one? I am trying to get my RX to work in standalone mode with NTRIP over bluetooth. I have tried to create an NTRIP profile for my RX several times now, following the workflow on Emlid. I go to emlid.caster.com, sign in, get all the credentials for a mount point, as per the directions, but Emlid Flow just keeps saying “Waiting for Corrections” and no corrections come.
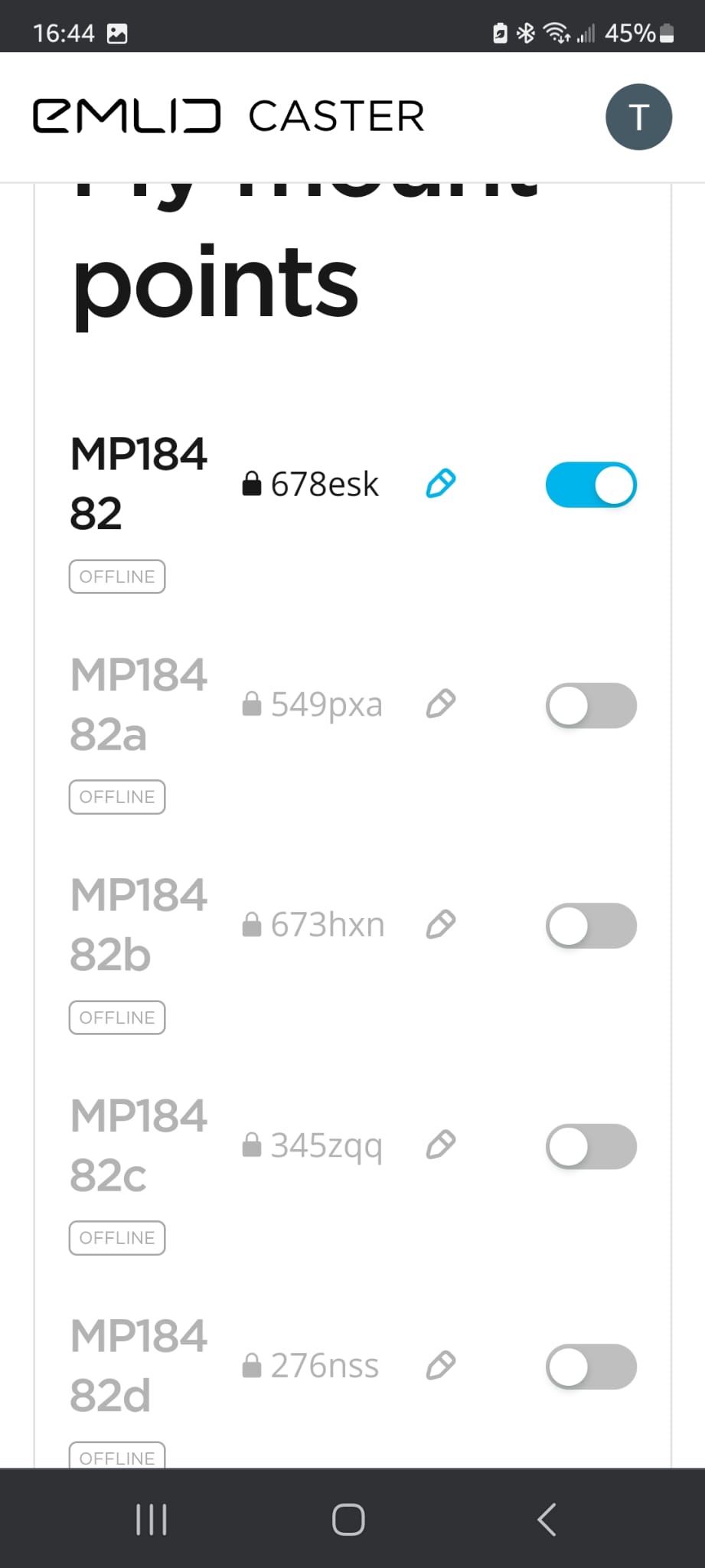
Your step-by-step actions. I followed the workflow above to the letter. However, when I go to “mountpoint” when creating an NTRIP profile, the mountpoints that are provided by Caster are not visible in the drop-down list. I feel like there is something that I am not fully understanding about the mountpoints provided by Caster and how they work. I have good cell service. I’m outside in pretty clear air with many satellites.
Hi, the Emlid Caster is just the method to “pass” a Base or RTN correction service to your Emlid RX. It does not provide corrections on its own, it always needs a correction source to pass onto your RX. You either have to set up a Base receiver like RS2,RS2+,RS3 or M2 and link it to the Emlid Caster through the internet using a Wi-Fi or cell connection. Or, you can subscribe to a RTN service, again using a Wi-Fi or cell connection in order for the RX to see the corrections. If your lucky, your area might have a free RTN (Real Time Network) service that would supply the needed GNSS corrections.
See this link to Emlid’s documentation for setting up a Base-Rover for Emlid Caster.
Mark, thanks for this. It somewhat clarifies things for me. When emlid says that the RX can be used in “standalone” mode, this would seem to mean that it must still be talking to a base station. So it’s not really standalone at all. A base station is required. Or am I missing something here?
The second thing that this brings up for me is this: can the emlid system (RS2+ base with an Rx rover) work at all without connection to the internet or does it absolutely require an internet connection?
Finally, if I’m working somewhere with no cellular coverage and no wifi, which is really common for a geologist like me, it sounds like I must have both an RS base and rover; the RX will not work in this situation. Am I reading this and other posts correctly?
One thing that I find really odd in all of this is that the Rx worked great a year ago without NTRIP. The Rx seemed to know where the base station was and I could survey with great precision just fine. A year later, no go.
I’m not sure where it says it is “standalone” on their sales website for the RX, but you are correct, you will need either a Base receiver + internet or an RTN service providing corrections over NTRIP that also needs an internet connection. Looking at the pictures only, I guess I could see one getting the impression that a single unit all by itself could give you RTK corrections. On their website it states: " Just add NTRIP. Reach RX is a network rover.
Gets corrections from any NTRIP service in RTCM3. No settings to get wrong"
And further down the page it says, “Use Reach RX with your own base and Emlid Caster”
It absolutely requires an internet connection for the RX. The RX does not have the LoRa radio for local connections to the other Emlid receivers that have LoRa radio.
That is correct.
I’m not sure how this was possible, unless you had both receivers connected to the same Wi-Fi and within range of the Base Wi-Fi and connecting via Local NTRIP.
Edit: I see in the other thread that you have purchase another RS2+. This will solve your problems with no cell service, depending on your site conditions. The low power LoRa radio needs good site conditions to operate in also. Also, please read the Emlid docs on the difference between Relative and Absolute positioning.
@mark1st.john: Thank you for taking the time to clarify all of this for me. I have found the Emlid documentation to be only so helpful. Also, thank you for including my comments from my other post. If I hadn’t had the experience of the system working last summer without NTRIP, my confusion wouldn’t have been so deep. I still can’t explain that. I now think that I have all of the info to make things work, both with the RX and the new RS2+.
This way when in remote areas without NTRIP internet immediately available to the receivers to RTK, could use OPUS for minimum 4 hours to about 7-8 hours for optimum point solution. (can even use Rapid Static for even more reduced wait depending on your tolerance needs) After logs complete submit to OPUS. Receive solution via email usually within an hour or less. Set RS2+ after return, on that same point with solution. Transmit corrections via UHF from RS2+ (with Harxon UHF radio) to receive-only RS3.
Hi David, isn’t this kind of the same thing? You will need one internet connection for the RX (most likely supplied by your phone/tablet internet service) and also a separate internet connection to the RS2+, either through a sim card installed in the RS2+ or using a Wi-Fi hotspot for a total of two separate internet connections working with a Base/Rover setup.
This what I was trying to say earlier when the OP asked, “The second thing that this brings up for me is this: can the emlid system (RS2+ base with an Rx rover) work at all without connection to the internet or does it absolutely require an internet connection?”
I know you were not replying to me, but I just wanted to clarify what I meant earlier by saying you needed an internet connection in order for the RX to work with corrections.
I should have been clearer on what I was trying to say.
I agree Tim, that would be a great solution adding an RS3 + radio, especially for tougher site conditions. Though, even UHF will have its own limits in transmitting/receiving range, albeit much better than LoRa can be in tough site conditions.
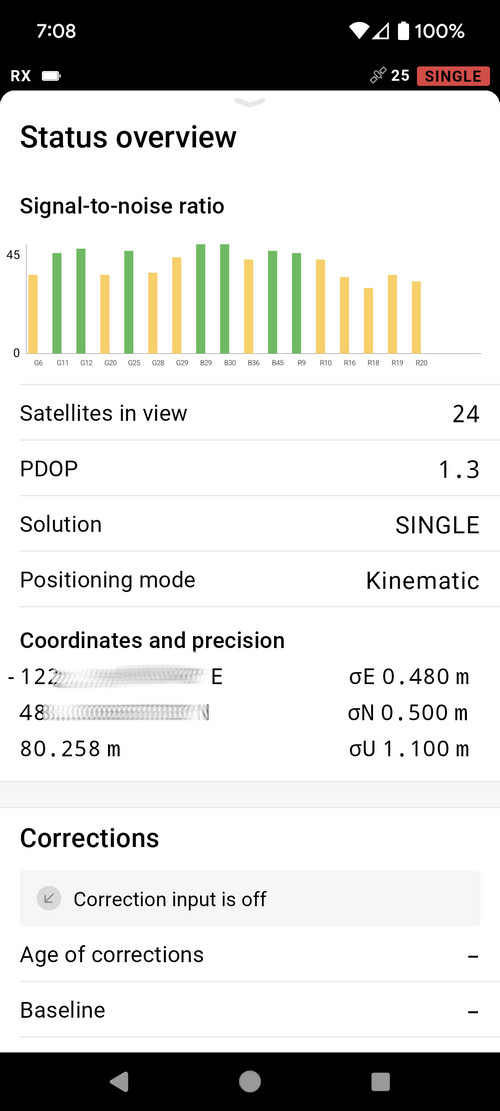
Just to be clear, the RX works just fine without receiving NTRIP corrections. It will remain in SINGLE mode and precision will be at meter level. But it “works” just fine.
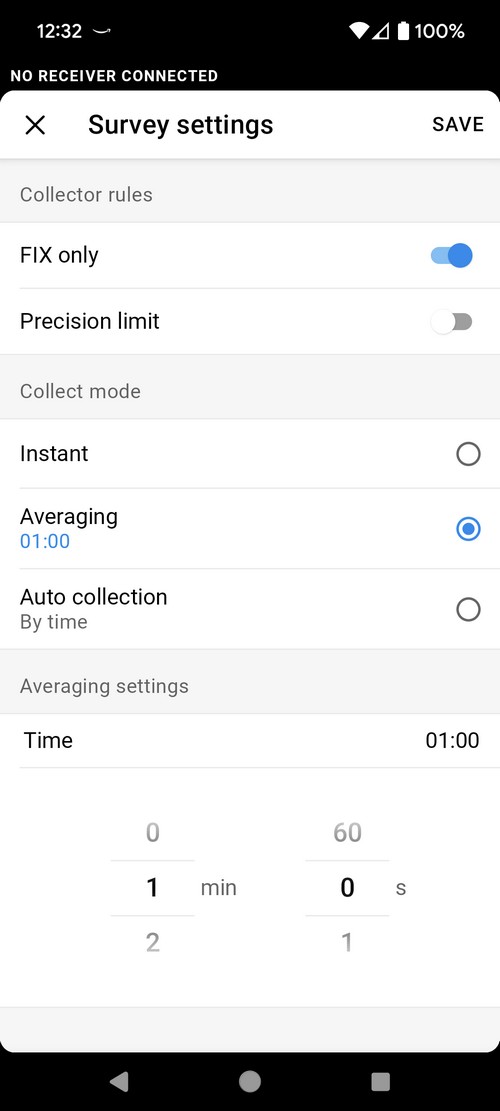
@dpitman That is what I think may have been happening last year. I may have only been getting “single” precision, not “fix”. The thing that was different this year was that Emlid Flow would not allow me to actually record a position unless it had “fix” precision. I am assuming that, due to my rookie knowledge, I was unable to figure out how to allow the acquisition of lower precision points. Are you aware of any settings in Emlid Flow that would allow me to acquire “single” precision, in case this happens again?
After getting all of your very helpful feedback, I realized that it would be really helpful to have some kind of diagram for beginners that would allow them to understand their hardware needs given their particular situation. I’ve attached a draft of something, but I know that there are likely to be literally tens of permutations of this. I’m wondering if anyone out there has ever shared anything like this and maybe it would be good to have on these pages. I know that I’ll get a lot of criticism for this first draft attempt. If you can keep the criticism helpful, maybe I can update this and share.
Geodesy is incredibly deep. Most of us non-surveyors only scratch the surface, and even that is complicated. We are lucky to have a few guys in here that really understand this stuff to set us straight when we get out in the weeds.
Javad GNSS use to be… there was considerable customer input in their Triumph model receivers when they first came out, mainly the Triumph LS and T2 receivers. We were one of the first 100 users that helped with input in the software design. You could ask for a new function in the software and the next day it was there. Mr Javad Ashjaee personally designed, responded and helped users contribute software functions on the Javad forum with the new platform up to his death in 2020.
Javad GNSS is still continuing under his daughters direction but with COVID and his death they lost a lot of great people, mainly in the Moscow office. The forum discussions are not as active as it once was. Even with the new LS+ receiver, there’s not much interaction unless there’s a software update.
I hope Emlid continues with improvement in the their devices and software. As I’ve said before, Emlid has a great future as a capable low cost entry level platform for new users whether they are professional Land Surveyors, experienced GNSS technicians or amateur surveyors.
I’ll be chiming in here. There’s not much left for me to add, though.
Overall, Emlid Caster is not a source of corrections. It works as a pipeline that transmits corrections from the base to the rover via the Internet. So, both units should be connected to the Internet. We have an article about the differences between NTRIP Caster and NTRIP Service.
Reach RX was designed to work as a network rover. So, the only way for it to get the corrections is via NTRIP. It can be a correction stream from an NTRIP Service or your Reach RS2 via Emlid Caster. It’ll allow you to achieve more precise centimeter accuracy. As @dpitman mentioned, without any corrections, a GNSS receiver can only determine the position within 2-4 meters accuracy.
@hicksonresearch, I got your point! I like the idea and appreciate the thought you’ve put into the diagram. We’ll consider it as we continuously work to improve our docs.
I just want to thank everyone for the proactive input! We truly appreciate all the feedback. Geodesy is indeed a deep and complex field, but we’re here to learn and explore it together.