



Loose term localizing the vertical is just adjusting your dataset to the site benchmark per the plans. A formal localization requires different software that compares legally recorded control points or CAD points against what is actually on the ground and creates a parameter that mitigates the error in a best-fit scenario. We use Microsurvey FieldGenius for Android but as we progress our drone program have stopped localizing formally, doing the vertical adjustment and then doing the horizontally shift in CAD. It’s just easier letting the drone and NTRIP data be what it is most of the time.
3 Likes
Gottcha, Looks like FieldGenius is about 1000$, is there another app that has similar capabilities like- Apglos Survey Wizard
Thanks for all advice
1 Like
Supposedly Apglos and Nuwa do but I have not used either one of them.
1 Like
Just replying to this thread as when I have the time, I want to read it all through.
So if I get my height ellipsoid wrong, that will mess up my x,y coordinates as well due to the difference in projection?
I just wanna build a straight fence line I cant see end to end with a transit, lol, not go to College again. 
Possibly even make a straight line of rocks across counties, that people will assume ancient aliens made.
Also when I get the WGS84 PPP report the datum is expressed as IRTF14.2021, is that an ellipsoid?, so is this going to mess me up as well? Do I need to convert?
1 Like
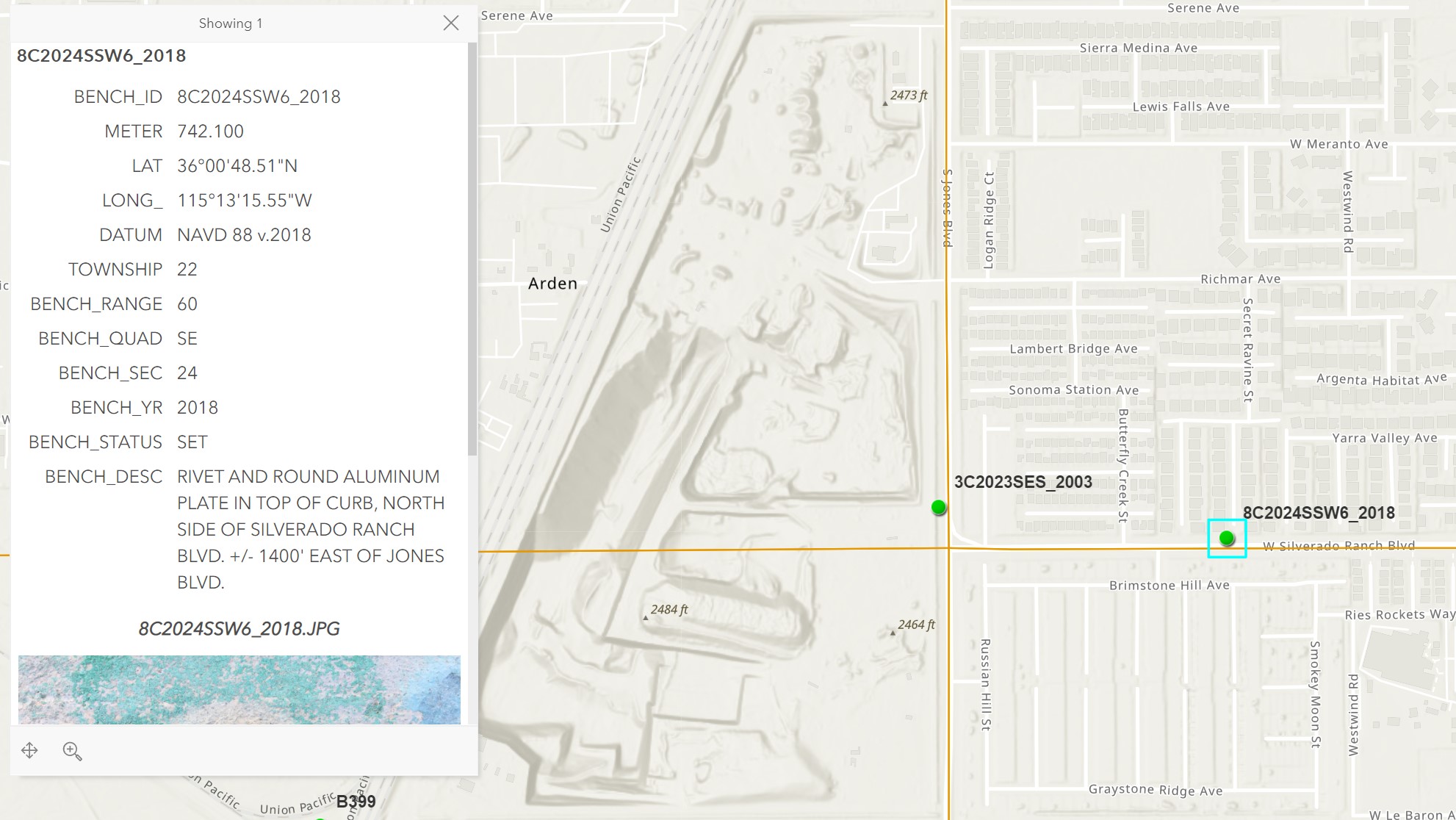
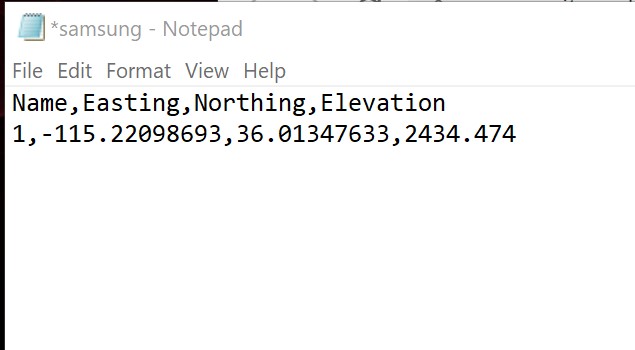
Just for giggles, I set up my RS2 (one unit) on a known point. Connected to local NTRIP.
Here are resaults
1 Like
So about 3 inches difference.
That’s what “she” said.
2 Likes
Wonder how to measure a known benchmark using (2) units without CORS, but using LoRa, BASE & ROVER to check or see how close?
Apglos… uhhh… : / don’t like, especially that money clock running down… screw that. Orange black theme just irritates me… personal pref. : /
I haven’t tried yet, but heard SurPad and SurvX (same chinese apps, different names) are really good.
I like FieldGenius for PC best… haven’t tried FieldGenius for Android yet.
1 Like
Yes, field genius for android seems best
3" difference on vertical? I think they round up…
1 Like
when i have time i will try it out, and post
$$$$$$$
Similar to your workflow somewhat.
Webinar- Prepping a survey project with Trimble Business Center - YouTube
1 Like
I guess you would have to traverse from another benchmark (control point) but defeats the purpose of checking the point? You’re depending on that other point being accurate? I guess that is where a registered surveyor comes into play and utilizing records.
Or set on the point for a really long time and PPP it. But probably not sufficient accuracy or service not available in USA?
Precise Point Positioning (PPP) | Emlid Docs
OPUS requires RS2 (multi-band).
NOAA’s Online Positioning User Service (OPUS) | Emlid Docs
You always have to have a back-site so it doesn’t really matter, PPP included. Whatever you setup on you have to shoot into something known to check.
1 Like
That sounds rather “redundant”. LOL
1 Like
Does anyone know the “proper” procedure for checking a known point against the NGS data sheet using a base and a rover? Not using CORS with just 1 receiver?
Not sure what you mean. If you set up your base by averaging, the resultant coords will be probably +/- 1-2 meters and won’t be accurate enough to verify a passive mark. However, you could PP the base after location of your points and NGS mark and then translate all coords to the new PP results of the base and then you could verify field located NGS mark. The coords should match within 2-3 cm of the published coords of the NGS mark depending on the occupation time of the base. Depending on the baseline length to the NGS passive mark, I would log a minimum of 1 hour at base. Longer occupation times logging at the base = more precise base coords for PP.
2 Likes
Also, after all the coords have been translated and you have reviewed and compared your check of the NGS mark, you could then re-translate all your points to the passive control mark.
Basically, we do this on every project with our Javad gear. Javad has a near real-time PP service called DPOS that is very similar to OPUS. It uses their own post-processing engine called Justin. Once you send the base data to DPOS in the field from the rover, it will send the PP coords back to the rover and all coords for the current project are then translated to the new coords in the field. Pretty cool process.
Javad also has a process called Real Time Postprocessed Kinematics (RTPK). You can download the current base file to the rover and PP the point real-time to verify the located RTK point if you are in a high multi-path area to verify the point. It also uses the Justin PP engine to do this. Javad is on the cutting edge of technology for Surveyors.
3 Likes