I am trying to run a mission using a base station and rover. There seems to be two ways people are doing to get to the same outcome.
Run both Base and Rover in rover mode on single and them post process them.
Run in kinematic using a Base and Rover set to the correct setting for kinematics.
Our goal is to get precise locations for a camera trigger events out in the field using only a base and rover reach setup. We are using a pair of reach devises in kinematic mode to try and do so. We have created a camera trigger cable that will send the signal at the time the camera is triggered but are have problems remaining fixed while in flight. I have even considered running a PPP setup with reach devises as multiple ground control points but am still stuck on processing that data. There is a company our of Australia that is doing something similar with their in house product linked below.
Fred from Propeller here. We’ve certainly learnt a lot about GNSS post processing developing our AeroPoint product. I’d be happy to give you a few pointers.
Can you upload some screenshots of the options view of your RTKPOST session? Can you confirm what you’re trying to process? It looks like you’re trying to process your base Reach with a CORS reference station to obtain an absolute position of your base reach. Is that correct?
Fred,
First off I have been reading about your aeropoints and they look really awesome. I like the design and form-fit you guys have come up with. I think this is going to be the way the industry will lean towards as it lends itself quite well to people who dont have high grade GPS equipment or the man power needed to collect the same high precision data. Also the accuracy you are showing has blown me away. I really want to try these out some day.
Back to the problem.
When I get back to the shop tomorrow I will upload pictures and what we are working with. We have been able to create a cable that signals the event when a picture is taken from the camera. Our biggest hurdle currently is getting the two reach devices to stay in constant communication. We can get a float position and randomly get fixed. After reading the forums I have a feeling that this may be due to poor antenna connection.
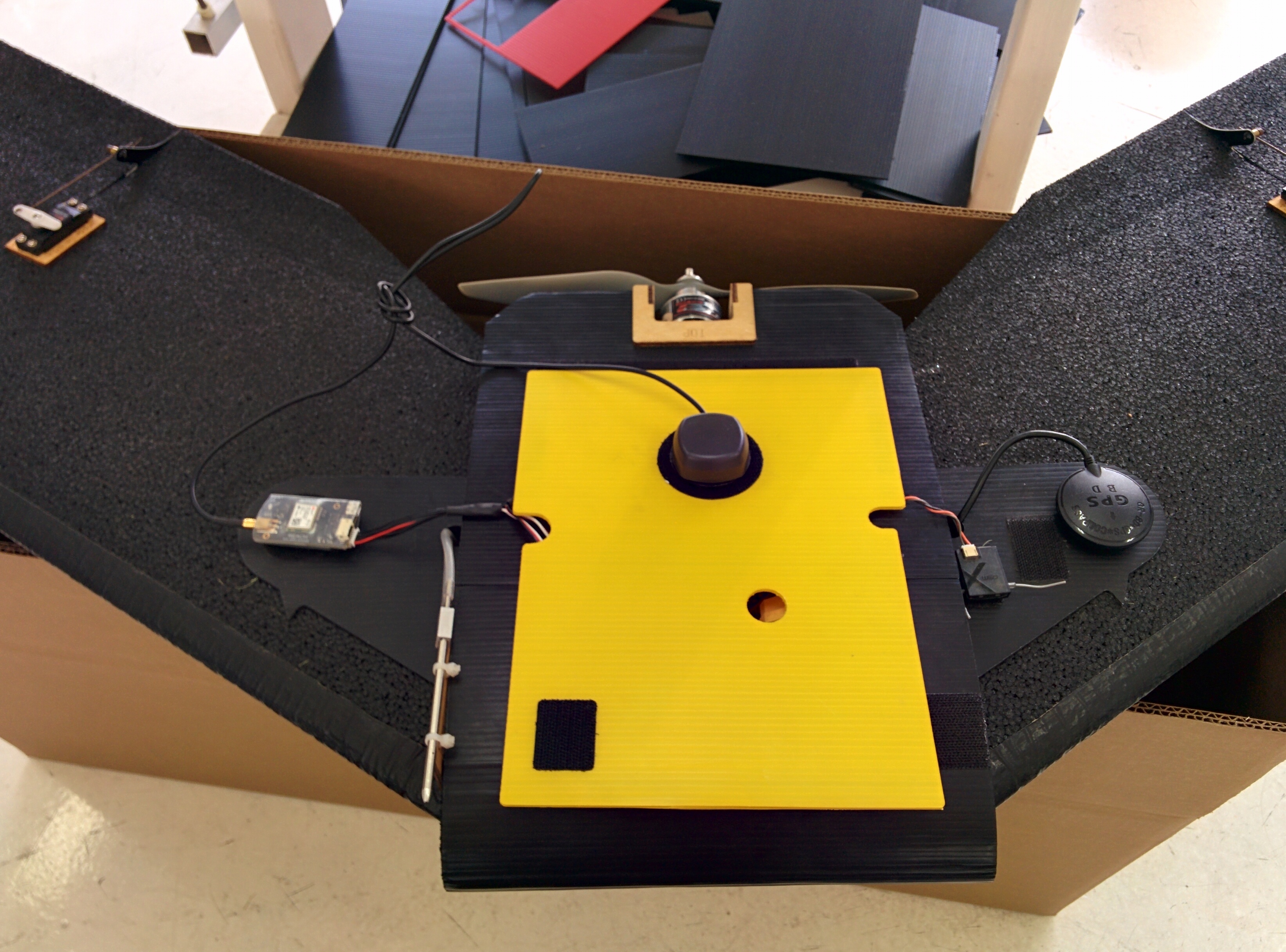
Our current setup is:
Reach unit set as a base and talking to the rover on an aircraft via RFD 900+ Telemetry radio.
Reach unit set as a rover on an aircraft also tied into a RFD 900+.
The rover unit is not injecting GPS but just going along for a ride on the aircraft and collection the events as the camera is triggered by a pixhawk via mission planner survey grid.
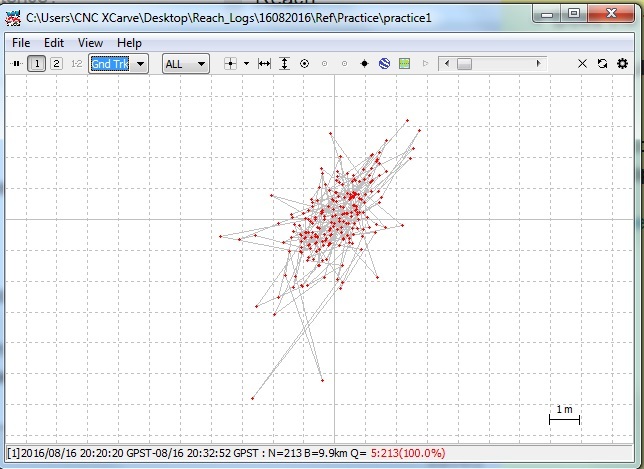
As stated originally, we are trying to capture camera events using accurate RTK data. We have flown a mission that went well until we processed the data and realized the rover was switching Q values the whole time (i.e. fix, float, single). The problems I am having is if its better to try and remain fixed using a base/ rover setup while flying or just run both reach devices on single rover mode for post processing later. I am having a hard time determining the better route to take. Again our goal is to end up with highly precise geotagged photos in as few steps and complications as possible.
If you only require the coordinates after the fact to geotag photos you’d be much better off just logging the base and rover observations to RINEX files and post processing them so you don’t have to deal with the complexity of radio communications.
Fred,
That does sound like it may be the better way for us to go. I think the main thing we are stuck on is the processing part. Below are the two different setups we use with the reach devices.
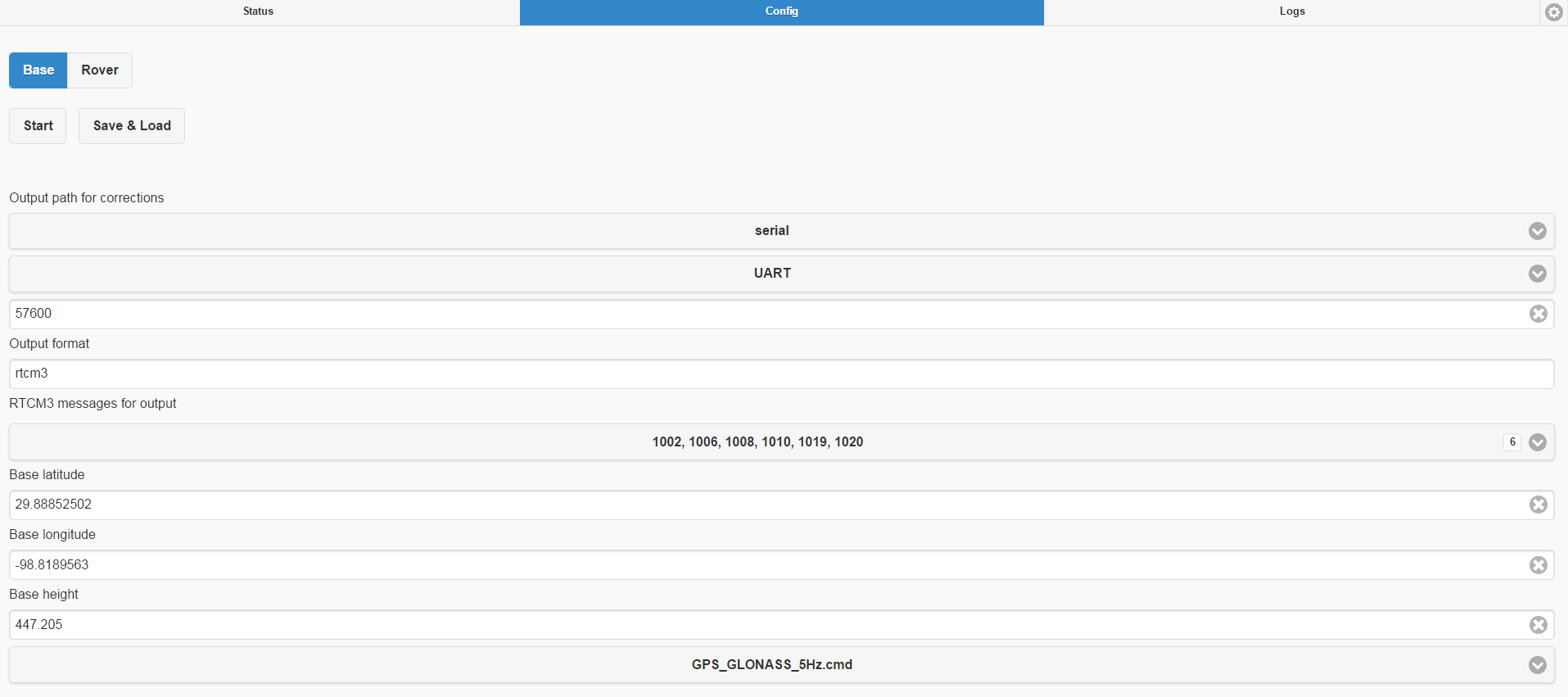
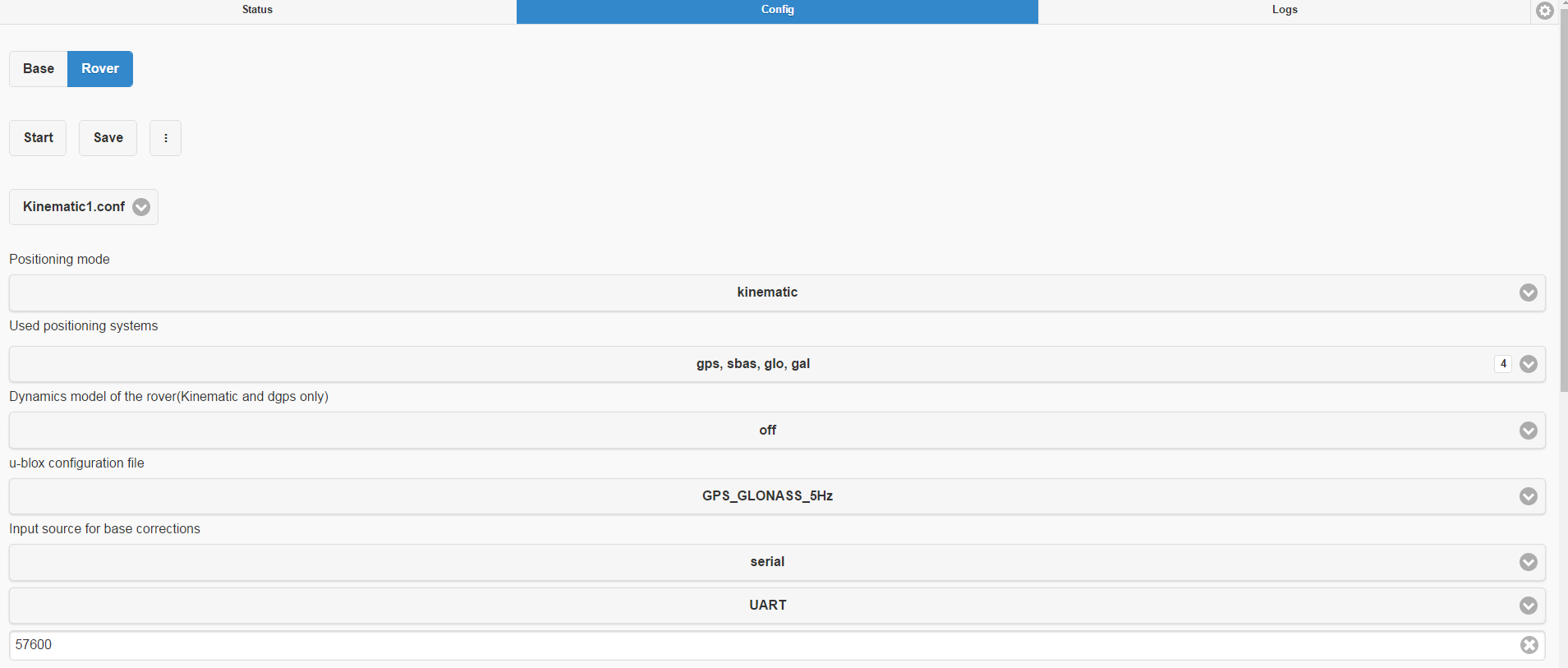
Stationary Base station and Rover on the aircraft communicating via RFD 900+
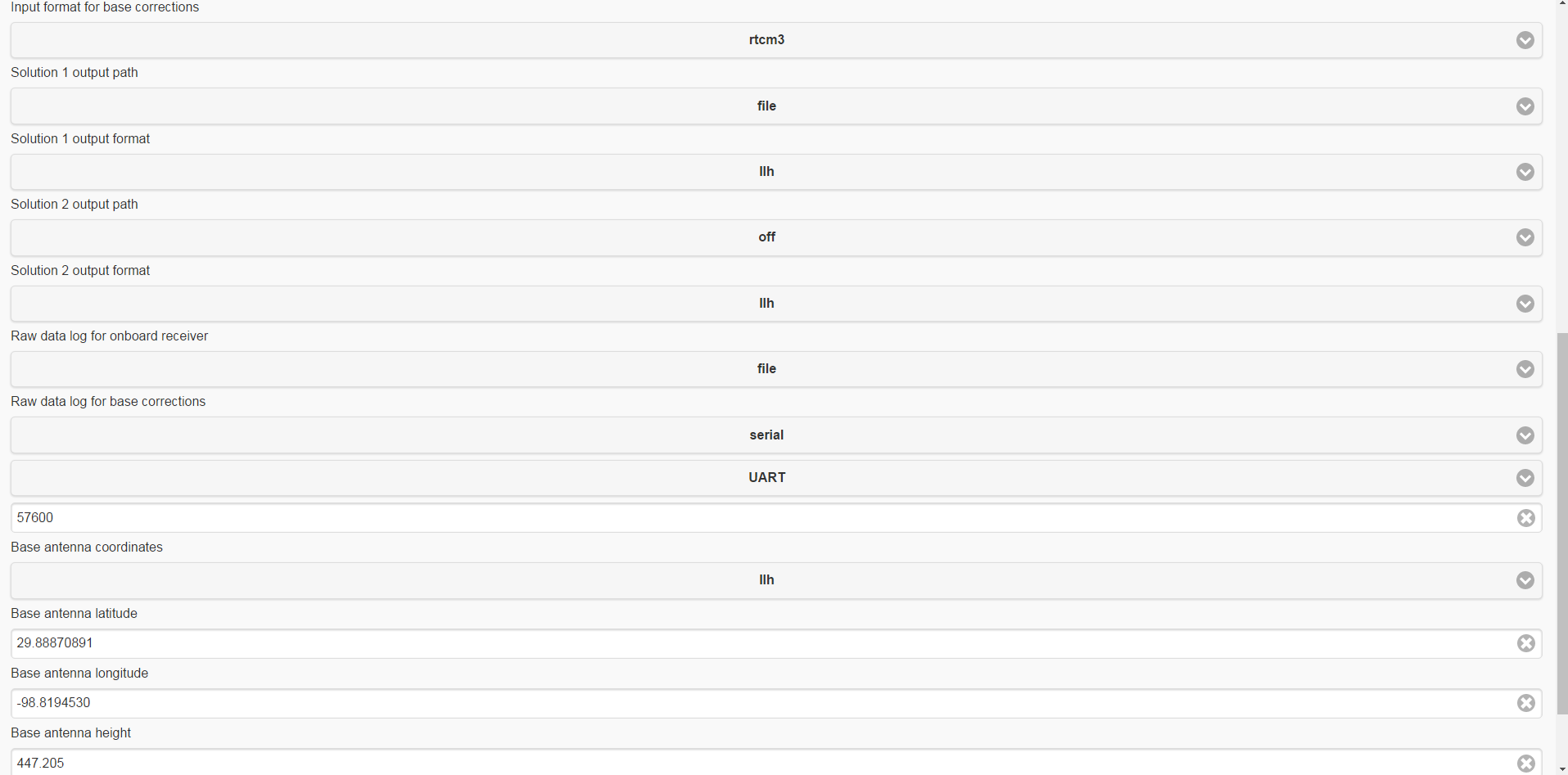
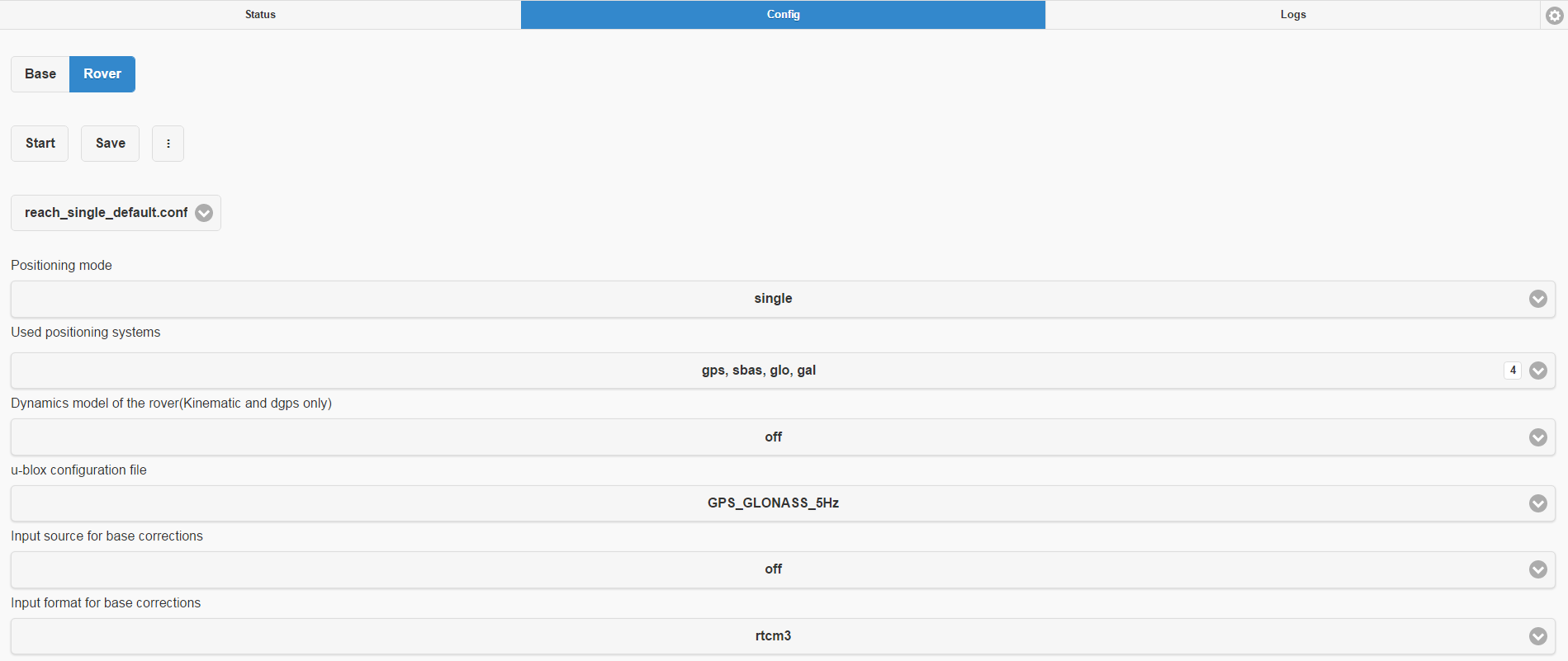
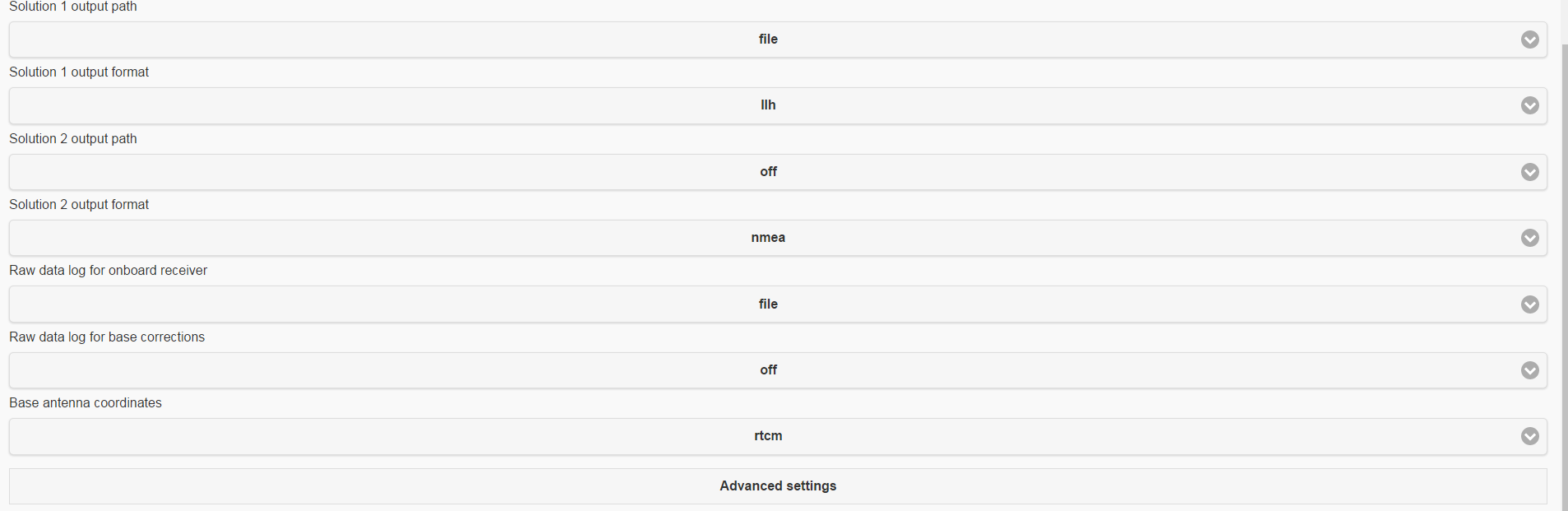
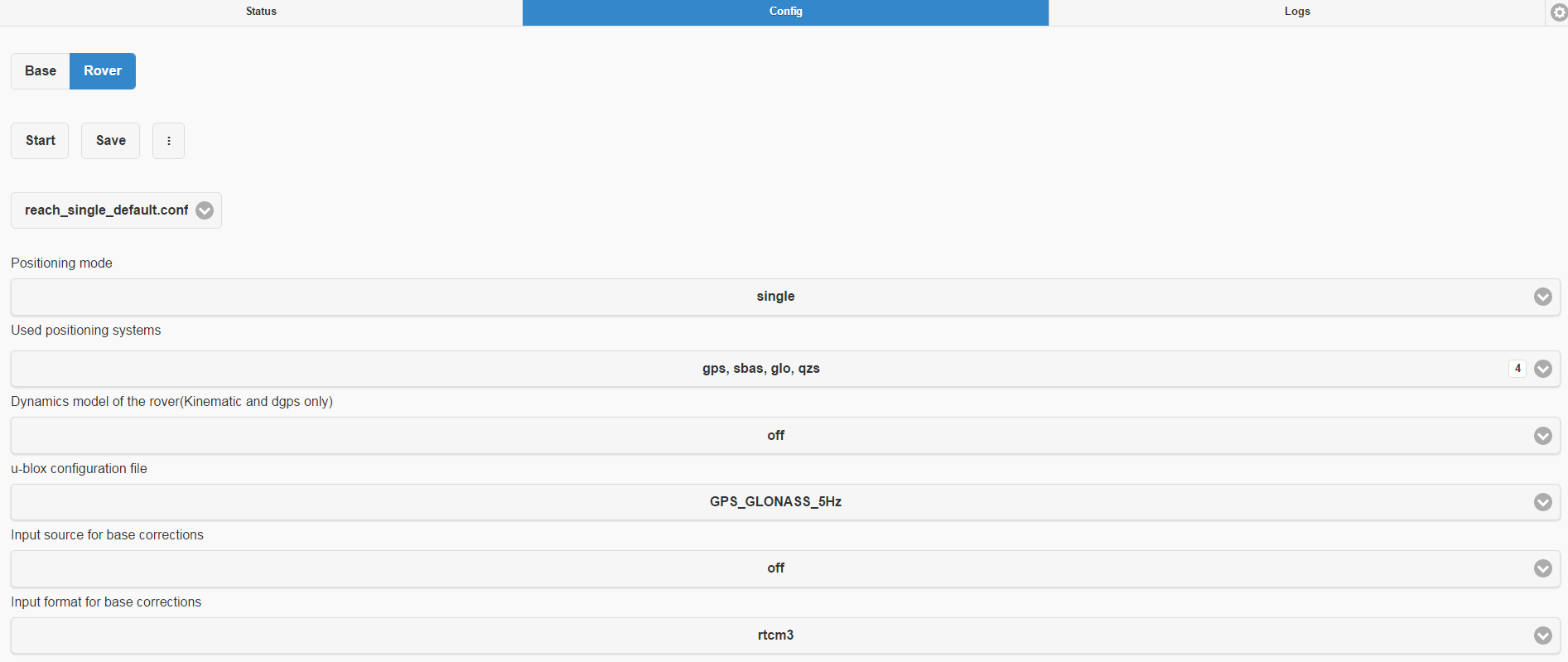
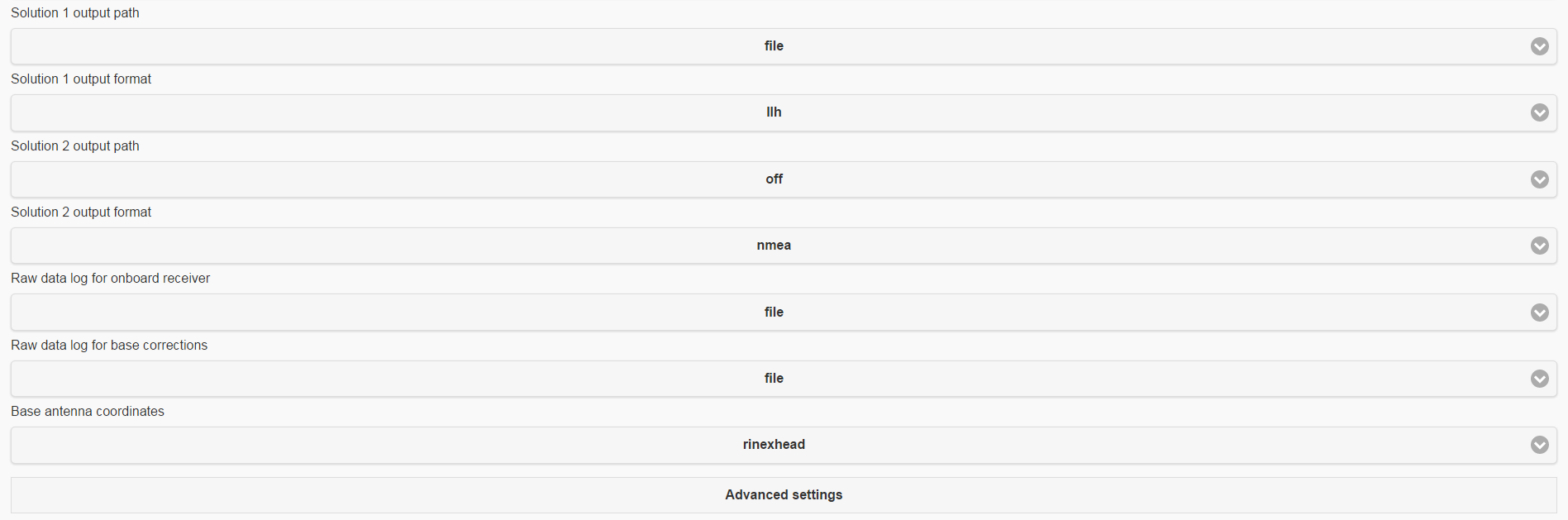
Base station settings:
The setup for this is the exact same as 1 just without RFD 900+ radios attached
We seem to be having a lot of problems with getting a fix at this point while running RTK mode (1 setup). If it would be better to process as in setup 2 I would need help with the steps involved. In the tutorial I linked above, I am not understanding where some of the files are coming from. https://docs.emlid.com/reach/gps-post-processing/
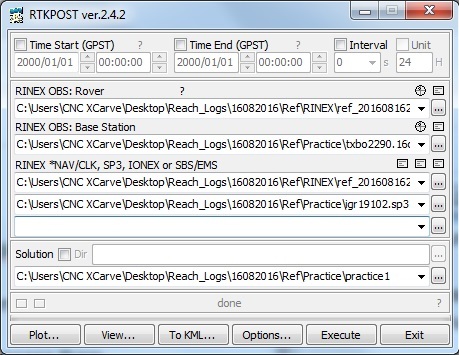
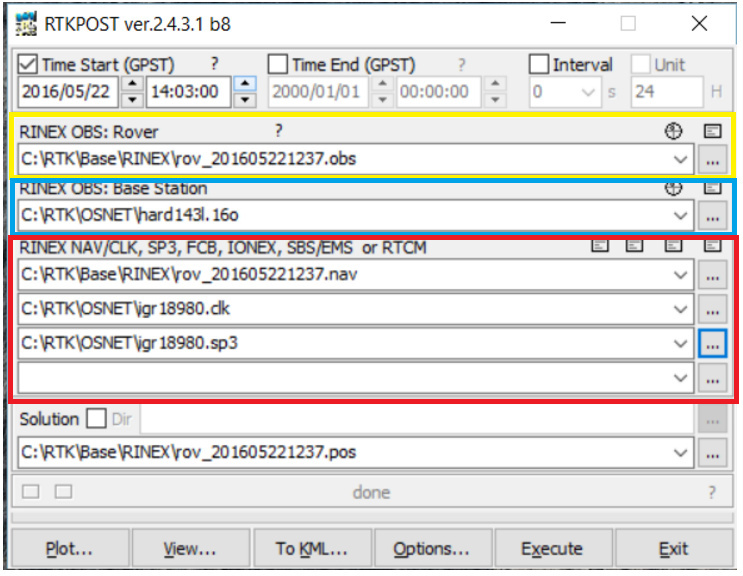
Image from Emlid tutorial above
Yellow box- observation file from base station set as rover and collecting data
Blue box- Im guessing I would get this data from the near by CORS station at roughly the same time I took the data.
Red box- I am lost at this point. If seems I can pull an sp3 file and nav file from the CORS site/ rover but not a clk file as shown in the tutorial.
It is true that mapping flights do not necessary need real time kinematic data link, as post processing will always be necessary at the end.
I get sparse informations of the required set-up in the forum, but it would be nice to have a proper entry in the Reach doc site. Including all 3 aspects :
Single logging configuration on each base and rover sides
Serial config with AutoPilot (APM style) on rover side for use as single GPS
Hardware camera hot shoe to Reach config for trigger time logging
@Pascal_P
I work for a UAV company in the US and we have been trying to develop a stand alone RTK setup for aircraft, both fixed wing and multirotor. The reach setup by far has had the best results and fairly easy once overcoming the learning curve involved. I think most of the things you have posted are currently under development.
A built in logging feature for the base station is in the work as well as the camera hot shoe. We have made our own hot shoe the sends a signal to the reach once a pixhawk triggers the camera. Somewhere on the forums is a description on how to do so. I would explain in greater detail on how we created this but it is not my side of the project thus im not 100% sure on how it was made.
The main focus of the post originally was to obtain a better walk through of the post processing steps. Im still not sure on how to complete a lot of it.
@Ian Could you please share your log files or send download links to support@emlid.com so that we can have a look at what might be wrong during post processing?