5Hz observation rate is absolutely fine for most applications on both base and rover.
Base corrections are usually sent at 1Hz, except for the ARP coordinates are sent at 0.1Hz
5Hz observation rate is absolutely fine for most applications on both base and rover.
Base corrections are usually sent at 1Hz, except for the ARP coordinates are sent at 0.1Hz
I have conducted test today and got same issue .
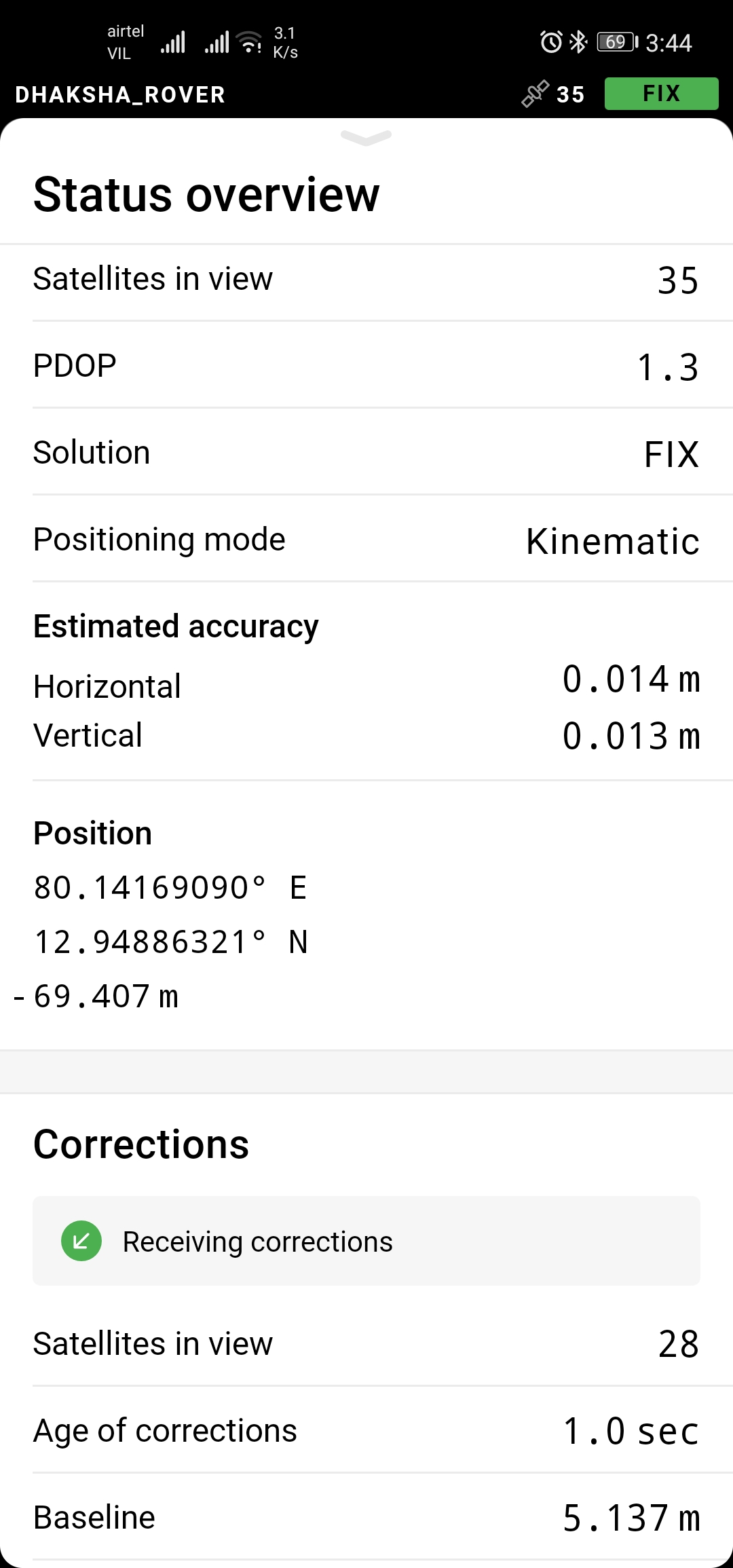
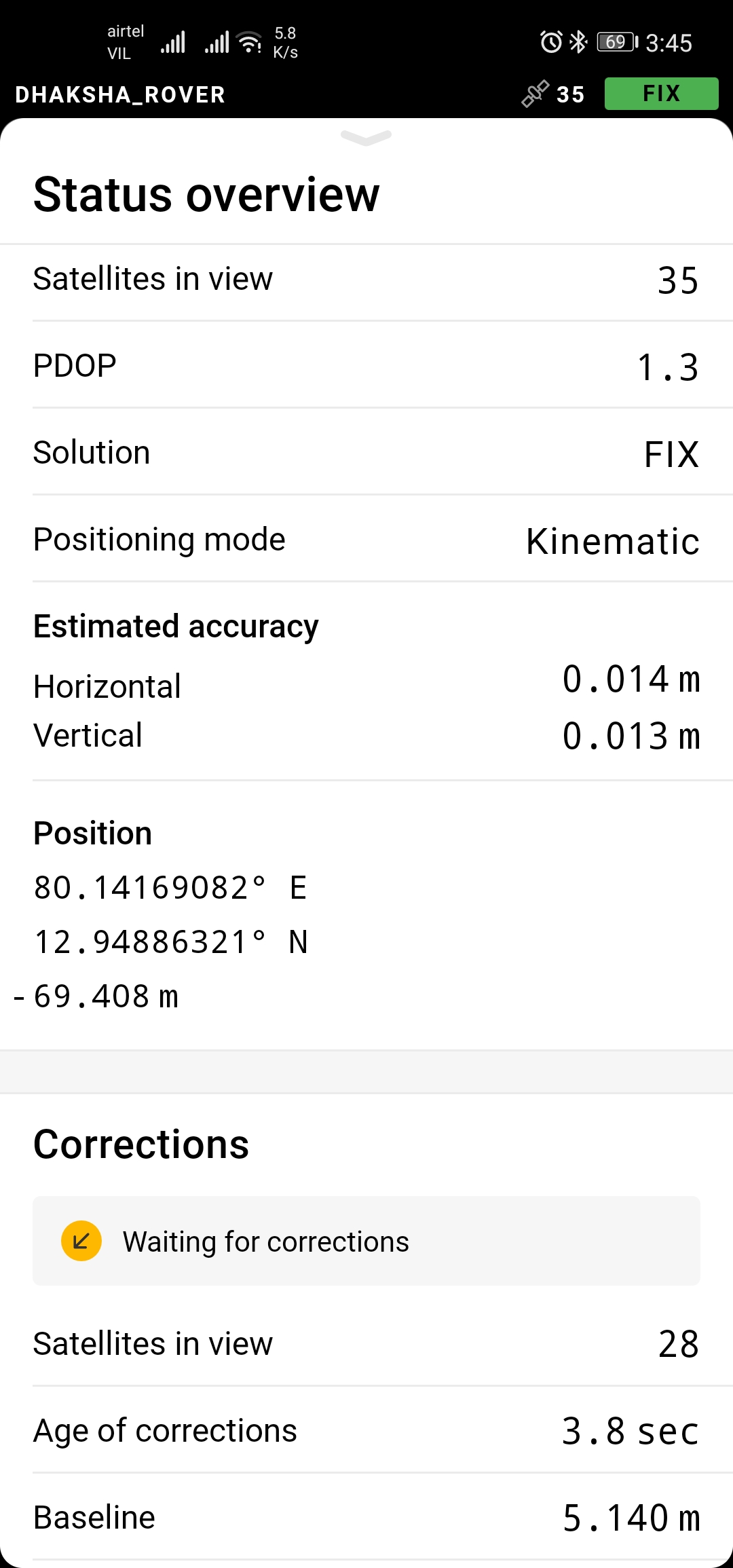
Yes when rover rtk age steady come close to 1 rtk fixed on mission planner and also correction accepted from base.but when goes above 1.5 to 2 s mission planner shows no gps lock and no correction happening.
For reference video of the same attached here.
https://drive.google.com/file/d/1_IO3DbtyJPeuz2r3qpoWwink9CwzLJGf/view?usp=drivesdk
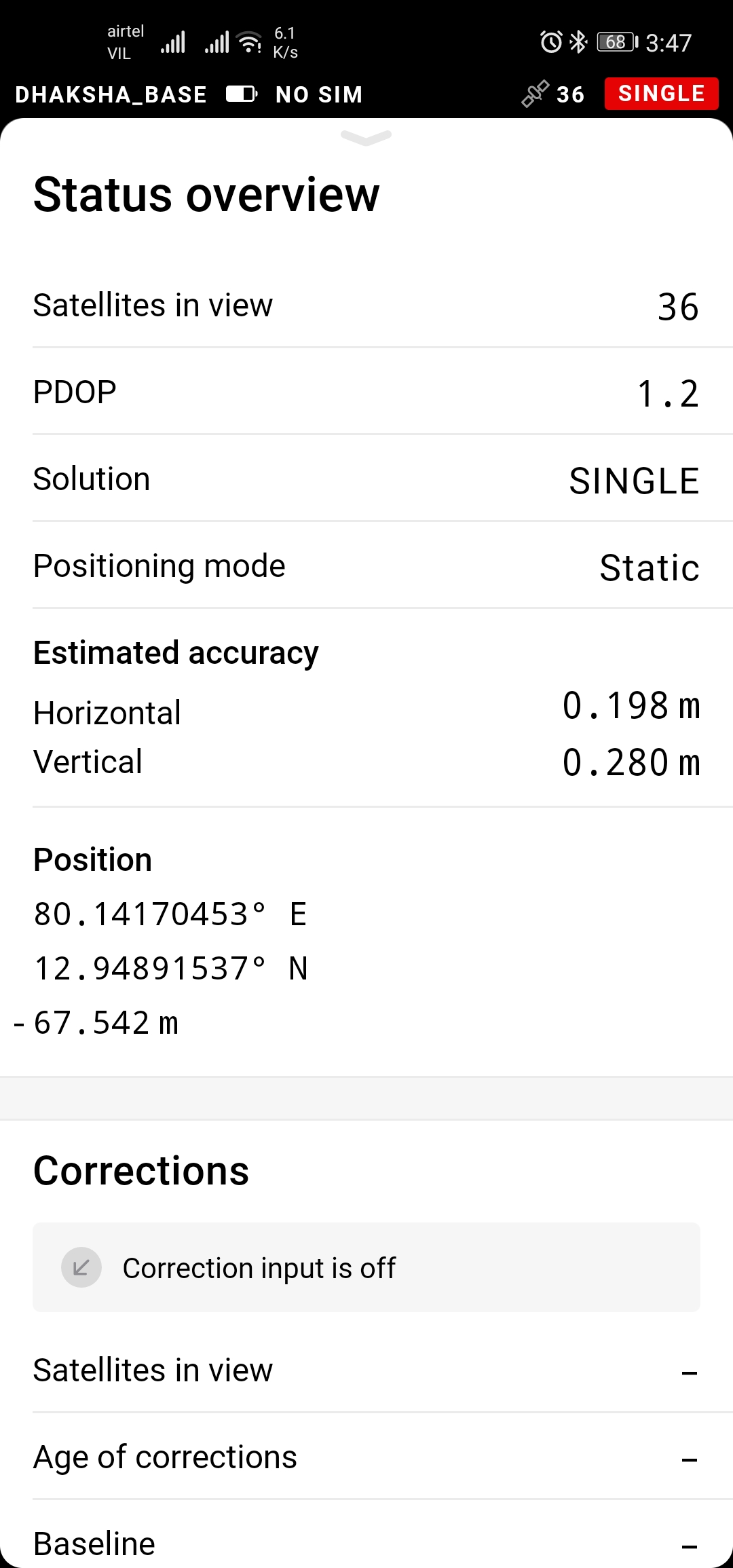
Base postion picture below
Where I am making mistake.please help me on this.
This is good, nice open views, it works when you get steady corrections. Your issue is you are loosing communication with the base station, temporarily.
So I take it you are using wifi network in a nearby building to pass corrections over? or are you using lora?
How do we know that it’s get steady corrections.i am using TCP method to pass the base correction and I’m very near by with my laptop to the base RS2. How the chance of getting loosing connection here.
There is wifi around nearby building but I’m not using that to pass the correction only TCP with my laptop.and not using lora radio instead using RFD900x radio for both M2 and flight controller.
If connect multiple device to base hotspot ( laptop,mobile ,) chance of breaking connection with TCP client ( mission planner).
@kseniia.suzdaltseva @PotatoFarmer
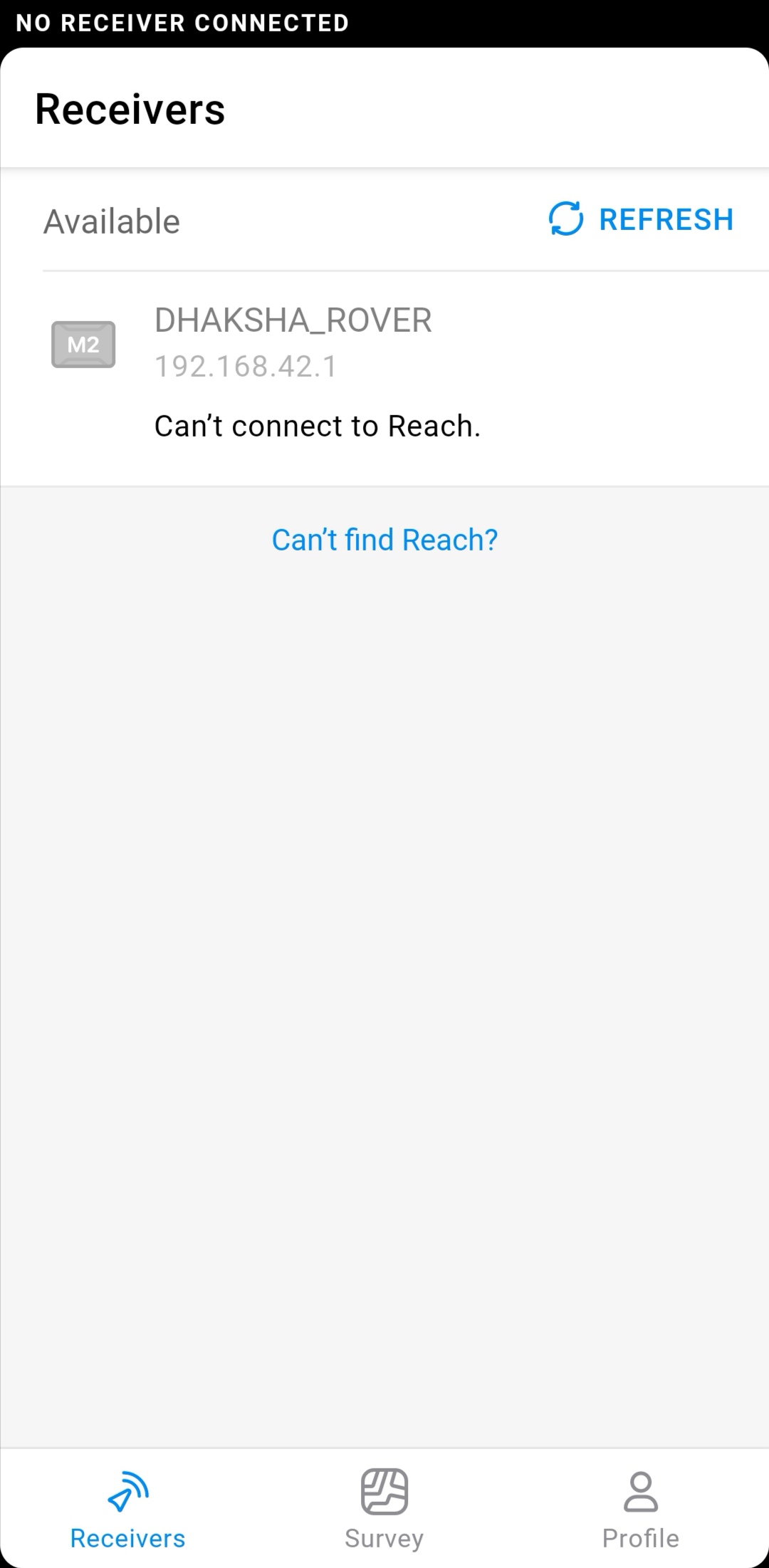
Each time I restarted reach M2 it’s goes time sync mode( green blinking).but it’s broadcast the wifi as rover I can able to connect but reachview app didn’t show any rover list on its page
May be this reason rtk fix issue happening?
Now rover came to normal operation mode ( green solid) about after 3mins.still I did not able to connect with reach view3.
Rover gets hot it stop working automatically no more access with rover M2.
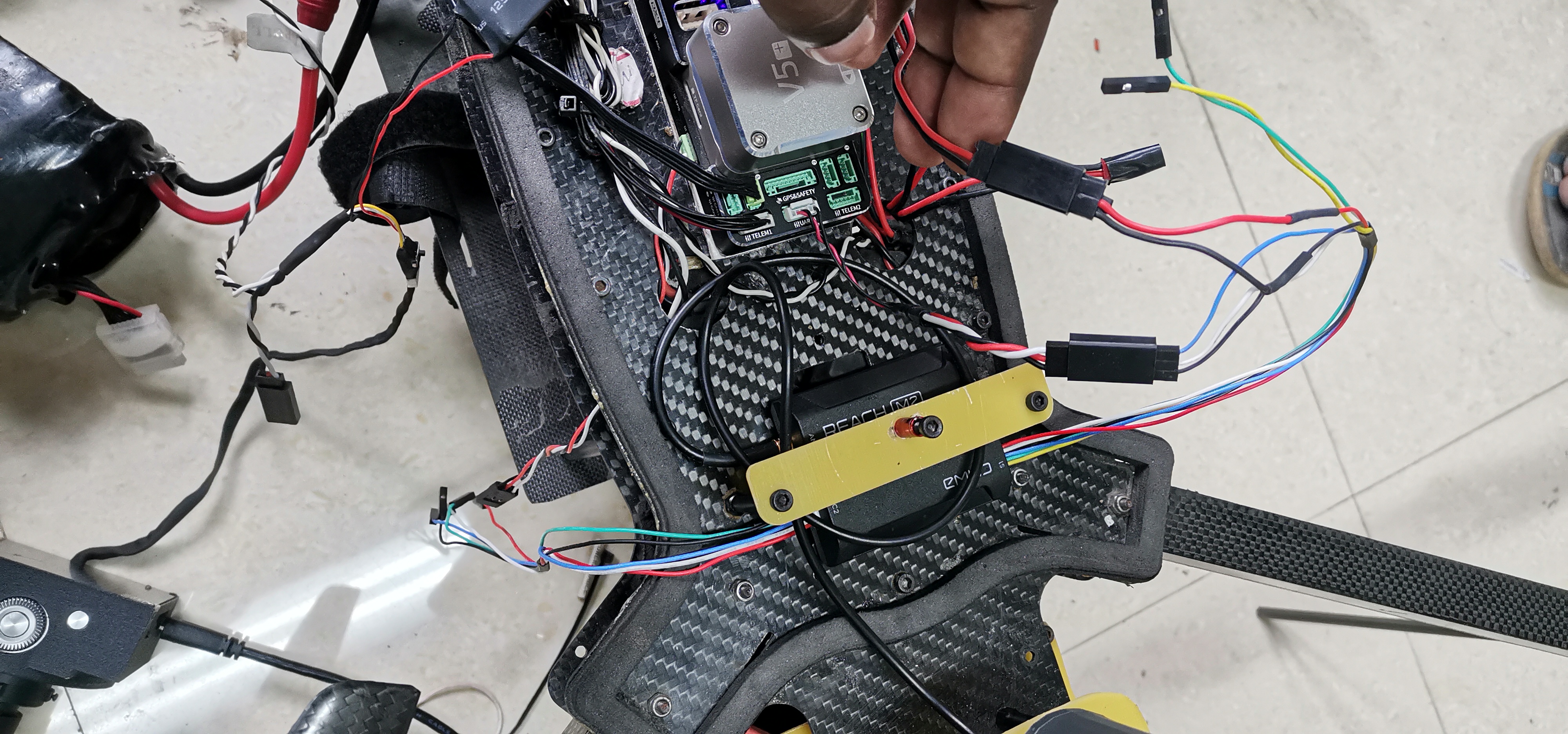
Please refer my above post for mounting of M2 and its very open and ventilated.
Hi @Kalai_Selvan,
Usually, such issues occur if Reach M2 is connected to the external power source and the autopilot simultaneously. In this case, there are 2 power supplies plugged, which may damage the device. If you connect Reach M2 to the autopilot only, please share a close-up photo of the receiver in your setup to check what might be wrong.
Examble how much update rates in rtk parameter for M2 as well as reach RS2 .if go through PPK guide it’s says set M2 update rates to 10HZ for drone flight …1hz for base RS2.
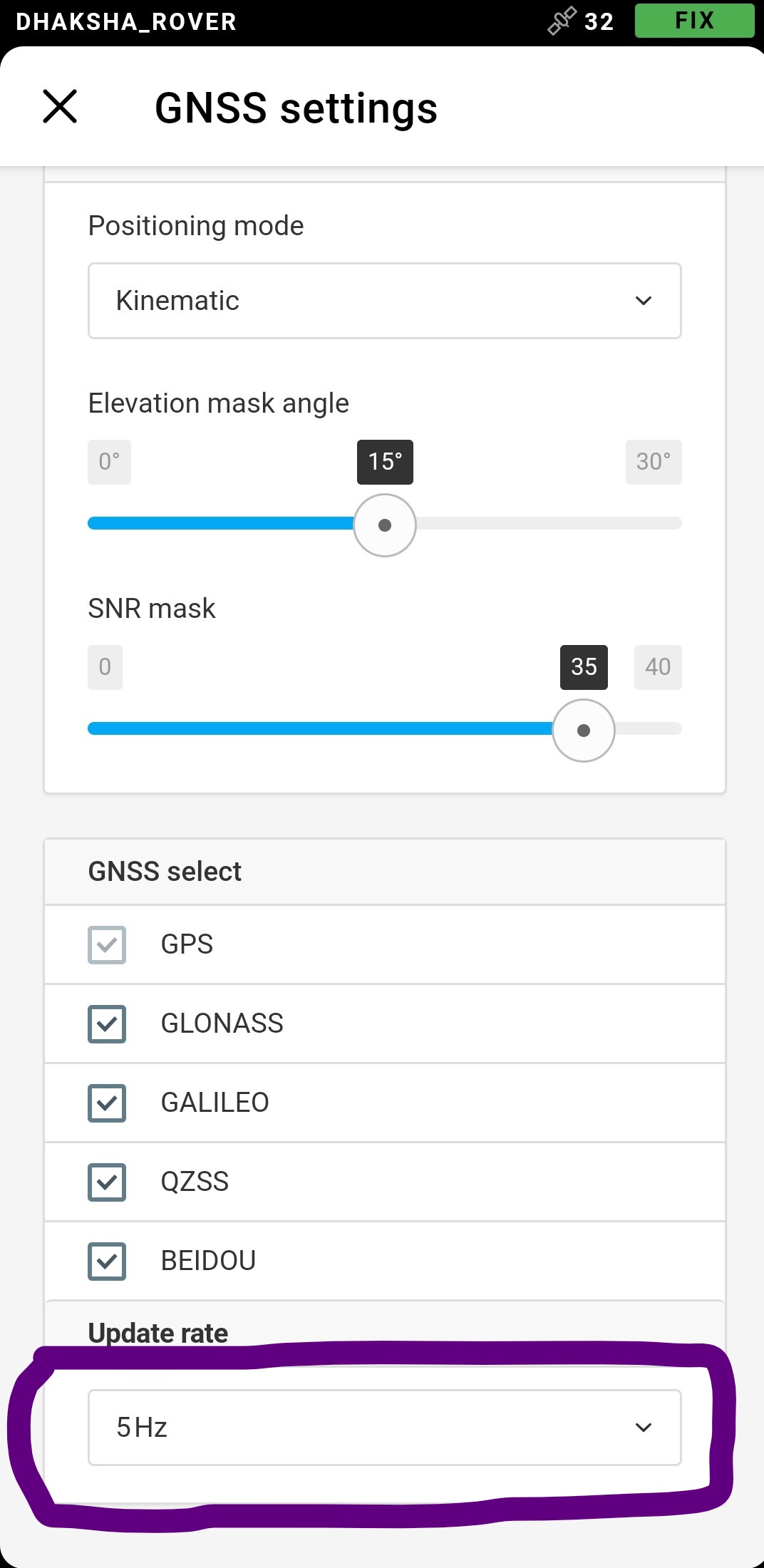
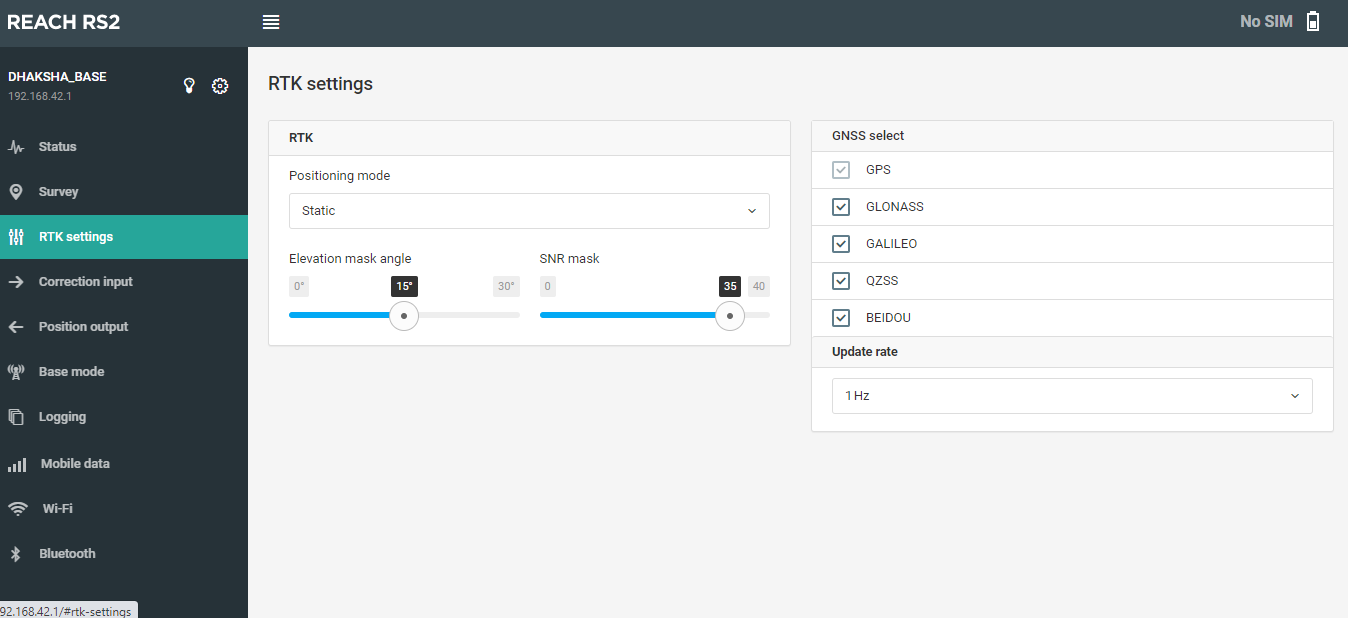
We usually recommend using the 1 Hz update rate for the base and the 5 Hz rate for the rover.
Then come to logging ,since I’m doing PPK I have to log only raw data in both M2 and RS2 or log position and base correction also because parallelry running RTK.
You can record either raw data logs on both devices or raw data and base correction logs on the rover unit.
When set postion output in M2 selected as NEMA protocol,but under this NEMA setting is generated as below. Is this setting just leave it as default or we have to change something.
You can use the default NMEA position output settings.
And under ROVER M2 base mode tap base mode correction must be turned off as below?
Yes, there’s no need to transmit corrections from the rover, so you can just disable corrections output.
I have connected only one power source to the reach M2 and no more power supply to M2 from autopilot.
I just removed power cable from the UART4 Port of the pixhawk .so 200% no dual Power source to the reach M2.
I’m still struggling to get rtk fixed solution. As you can Refer above posts and screen shots and also see the attached video link.
Even look for the pixhawk autopilot configuration in mission planner.
Kindly help on this .
When I try to set this specially on the base set 1hz from 5hz at the movement correction stopped and no more connection with rover .
Again setted 5hz update rate only fixed that issue.
It’s really no issue base as 1hz and rover as 5hz ?
REACH M2 GNSS setting:
REACH RS2 GNSS setting:
as per your instruction i have clearly done those se
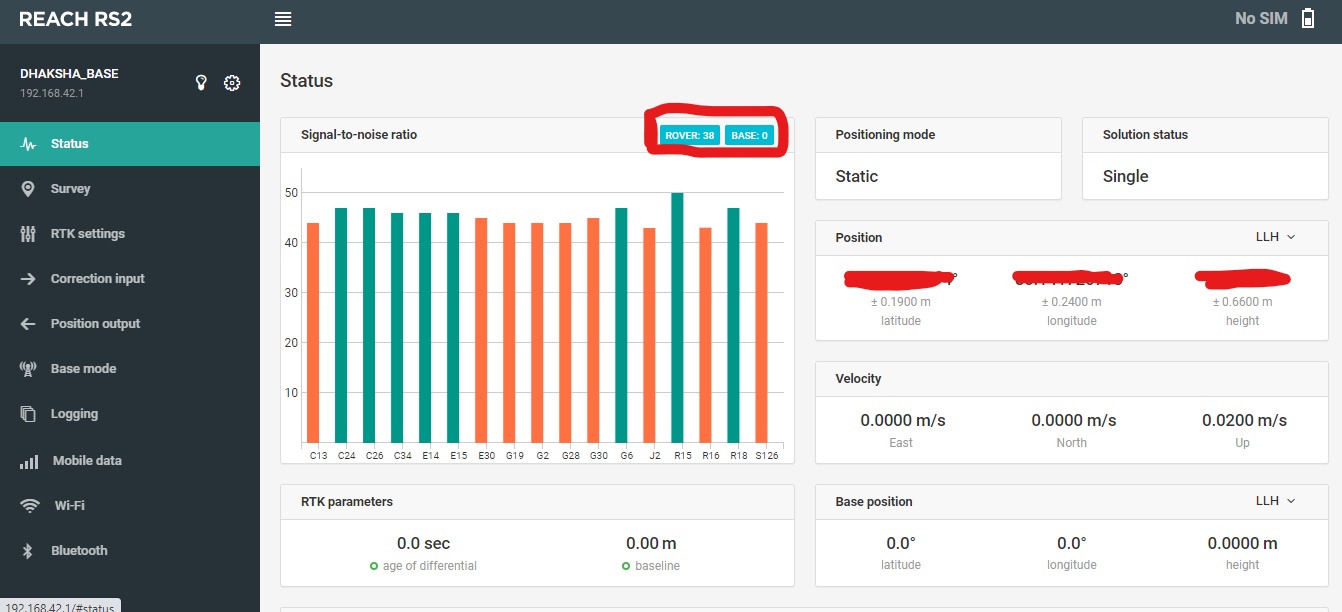
REACH RS2 base showing satellite numbers is 38.
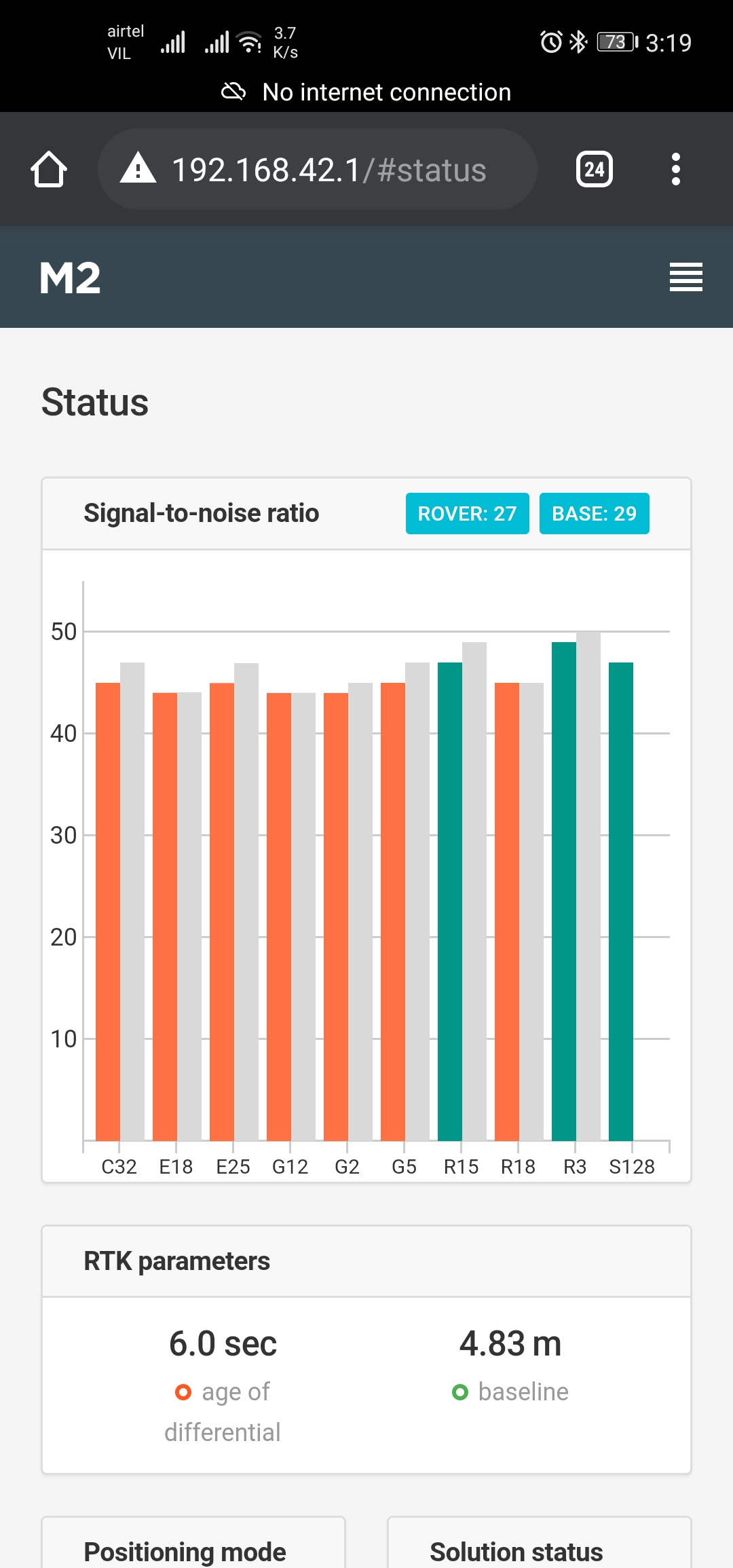
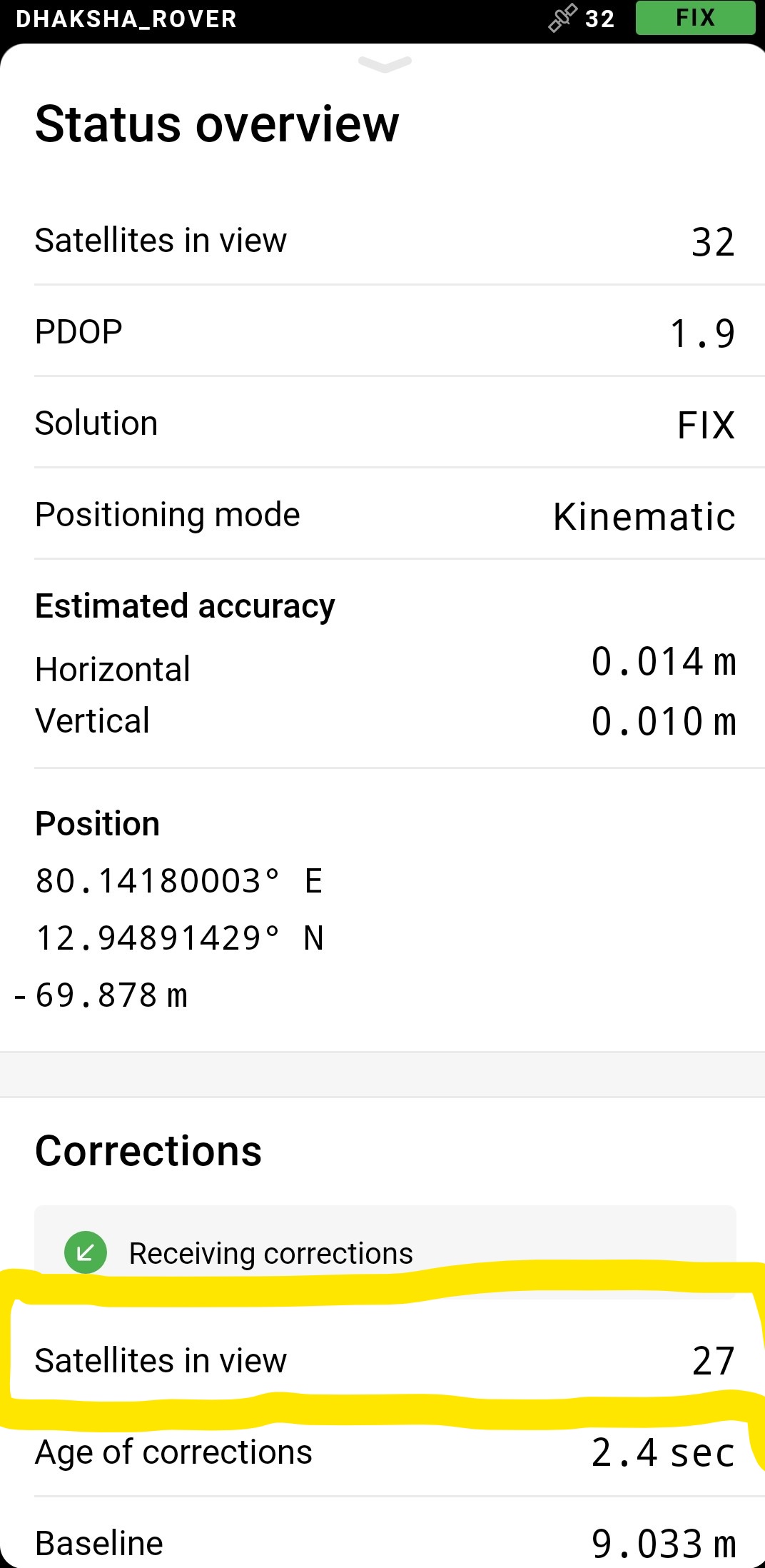
REACH M2 status on REACH view 3 :
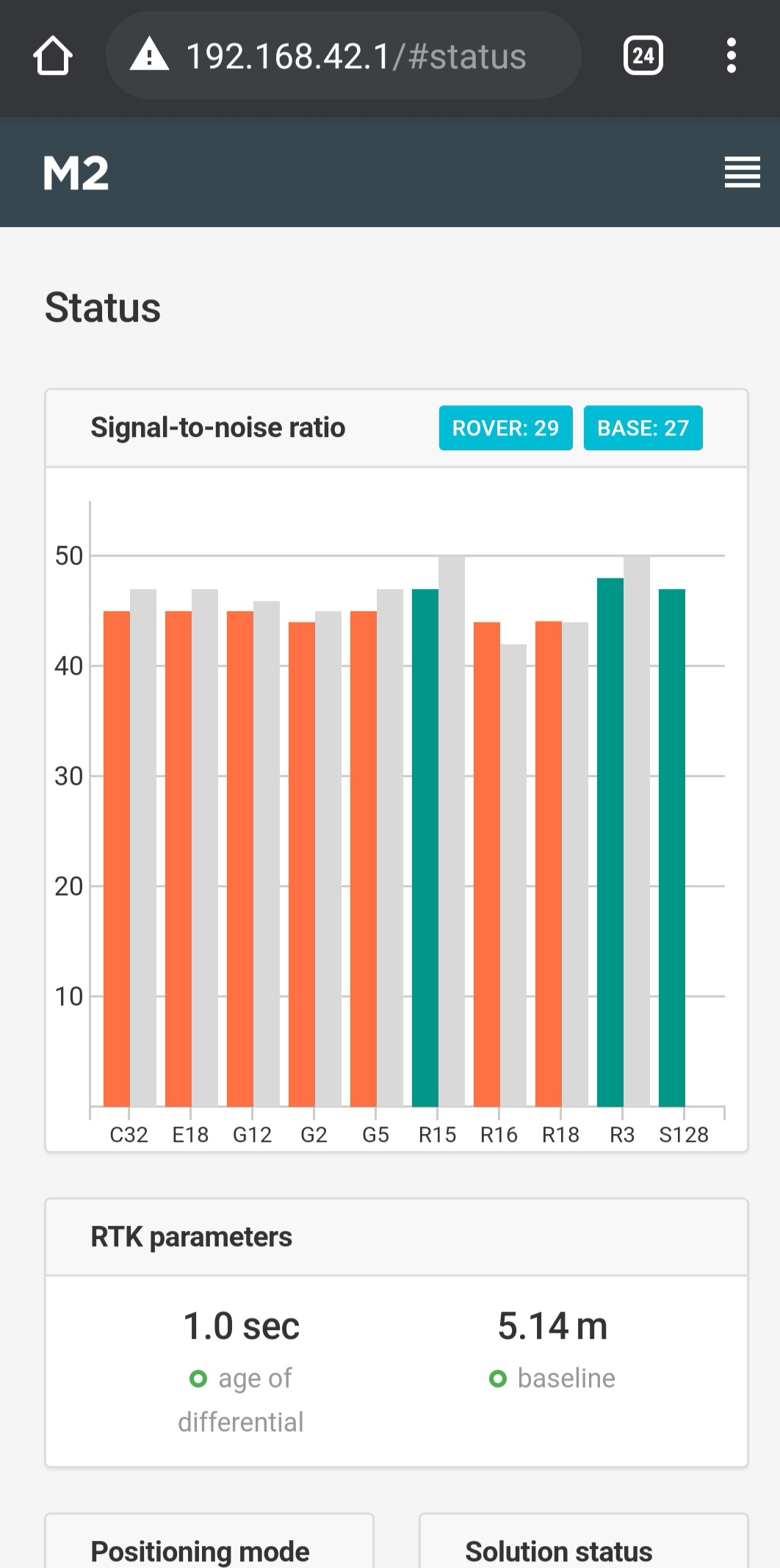
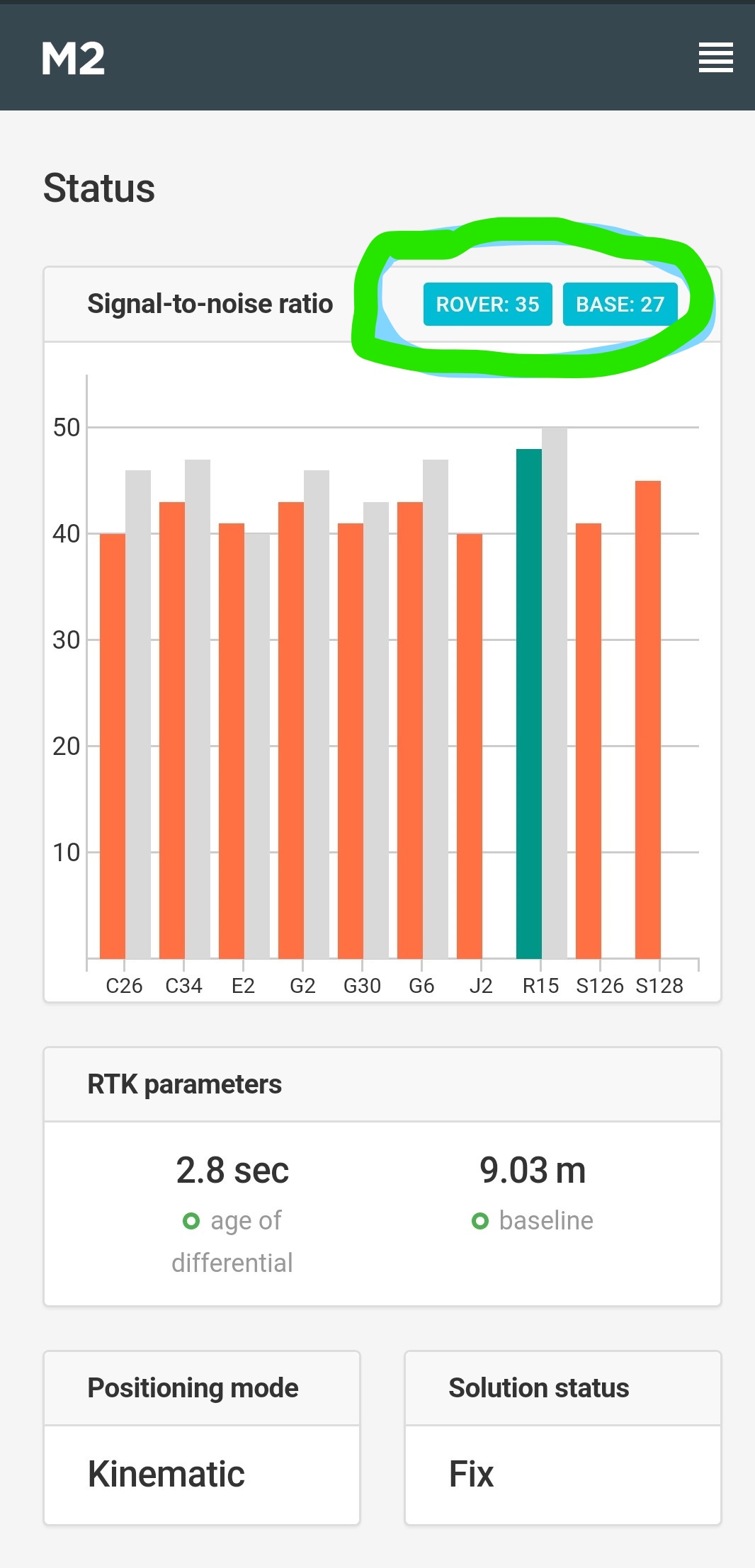
!REACH M2 status on REACH View 2:
REACH Rs2 satellite data and REACH M2 satellite data taken screen shoot at same time .both RV3 & RV2 showing BASE satellite showing 27 only instead of 38.is this right or its bug.
still my RTK parameter problem NOT solved even i tried today also with 1 hrs. continuous test at outside. RTK age steady keep changing up to 10sec randomly.
I already related arducopter setting screen shoots posted along with RFD 900 radio setting also .
GPS type ,serial4_protocol,GPS_Injecttype and baud rate everything correct but why I’m not getting RTK Fixed .
every thing is correct as per document says and i followed .
You are having communication issues,
Solve one problem at a time. The corrections from your base should arrive in 1s or less each and every time. I see in your picture your age of differential is 2.8s, this means you have not received a correction in 2.8s. You need to trouble shoot your network issues.
Age of differential is goes upto 10s also .base RS2 and connected laptop is very near by and no chance of network issue and loss of communication.
But especially I had very bad connection issue with M2 as it’s not realiable .I’m within 3meter distance from base and rover .
This is usually an indication that your communication channel is saturated. Try lowering the amount of messages (or the number of messages pr sec) being sent, if possible
I want to do RTK/PPK at a single flight .I’m not adding or sending any extra message as messages are default setting only.is that known issue and had anyone same kind of issue.
If I pass base correction to mission planner via bluetooth it’s possible?
This is communication issue between base and the laptop? Or mission planner to reach M2.
It could be, but is really hard to troubleshoot from here. Your 2.8s under normal circumstances is high anyhow.
I believe that you have read my previous post and screen shots in this discussion .i have shared video also any how could you help me in this .
I have followed Ardupilot integration guide given by emlid .but as a manufacture they cant able to give solution for my problem.
all the possibility also i was tried and those screen shots shared also.
Corrections go from your RS2, to your home router I am guessing, to your M2.
Just because you have One bar of WiFi does not mean the connection is stable. Is this router located inside a building by chance? Is the signal being blocked by the walls? It could also be as simple as someone has QOS enabled on the router, and the packets are being held up artificially.
First get RTK figured out its easier, then when that’s easy and stable, learn PPK, there is no need to do both simultaneously.