



Hello all,
I recently bought a Matrice 600 Pro and have a Sony A7R IV camera mounted on it along with the M+ module. I plan to use the acquired photography for photogrammetric mapping. I will be using PPK mode only and will be setting up the RS+ base over a known GCP with coordinates so I do not have LoRa set up. During a recent test flight, both the base and rover hotspots showed up in ReachView and the base showed satellite connections and lots of green bars. But the rover showed only red or orange satellite bar connections, no green. Will this be a problem in post processing the data to fine tune the photo centers? Thanks in advance for any help.
Congrats on getting to PPK drone mapping! You should experience some amazing results.
The status bars will only turn green if you are running RTK and receiving corrections. No need to worry about it for PPK logging. Are you recording the events for the camera shutter to the M+?
Hi, thanks for your reply. It’s good to know that the satellite bars don’t need to be green if not using RTK! Yes, I’m recording the camera shutter events to M+, the camera is connected via hot shoe. I will be flying another test flight tomorrow so this info comes at the right time. Next step, post processing. Is this the correct place to ask about post processing?
For starters I would check out their support docs and search the forum just a little. There has been allot of good discussion on PPK and RTKLIB. If you have questions beyond there here is fine.
This is just the first sub-section so you probably want the next couple of sections down.
Thanks, I’ve read thru some of the docs and it seems pretty straightforward. I do have one question about setting up the base station: I will have the coordinates for the GCP and I read that the coordinates have to be entered as LL and the elevation as meters. There is a pulldown option that allows for X,Y,Z coordinates in feet, does that not work? I can transform my GCP to lat, long but it would be more convenient to just use the state plane coordinates.
Hi @normalhtswayne,
Welcome to the community forum!
Let me clarify this.
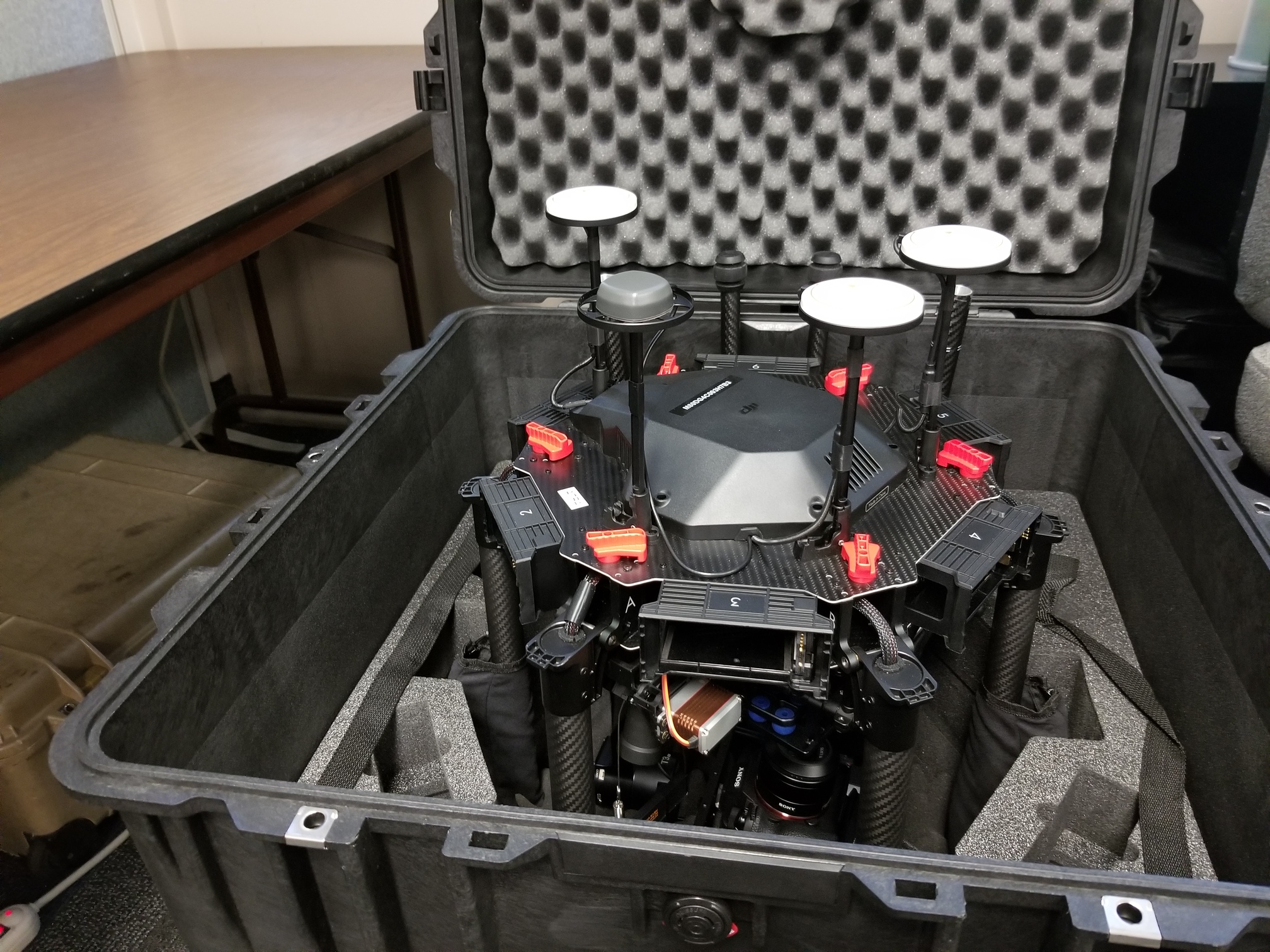
Red or orange bars indicate that SNR of the satellites is below 45. For better post-processing results, the quality of the observational data should be as good as possible. In most cases, the reason for a rather low satellite’s SNR is the issues of the antenna placement. Would you mind sharing the photos of your setup so I could check it?
At the moment, you can set the bases coordinates in the WGS84 coordinate system only, in LLH and XYZ format. The units of measurements are meters only.
We’re working on adding different coordinate systems support for the base as well in ReachView 3 beta version.
2 Likes
Thanks for correcting that. I was mistaken that the gray bars are the indicator for corrections being received, but that does not necessarily mean that you will have a fixed RTK solution. I will say though that having orange bars is not necessarily a sign that you will not get a good PPK solution. You can judge though by them being low or erratically bouncing that those satellites and/or constellation may not be the best to use. You can collect them and chose to exclude them from processing later though.

Hi @normalhtswayne,
Thanks for the shared photo.
Your drone looks fine! However, as I can see from this angle, the GNSS antenna is placed on the same level as the propellers. In such setup, propeller blades can cause the interruptions of the signal, and the vibrations from the propellers might affect the reception negatively.
Would it be possible to place the antenna a bit higher?
Hi,
The GNSS antenna is actually mounted at the same level as the other antennas, this picture shows that. The only place I could move it to would be the very top of the drone. I tried another test flight today but the rover hotspot would not remain constant and the Emlid page would not load for the rover. I couldn’t even check my connectivity to any satellites. I had no problems with the base station, it connected very quickly and to many satellites.
Hi,
I have completed a test flight of a job we had flown recently by another company. I downloaded the files from the rover and base and processed the files with the Emlid post processing software. I now need to know if the results are good and acceptable because I don’t know how to interpret these results. My final goal is to have a set of photo centers that correspond to each of the photos taken by the drone so I can import and and process everything with photogrammetric software and check the results against the previous flight and mapping. I tried uploading my files but no success (wrong file extensions) Any help is appreciated.
You used PPK and have the POS events file? And now need to retag the photos?
Hi,
Yes, I used PPK and have the pos events file from post processing. How do I correlate the events to the photos?
I use Geosetter. You will want to use RTKPOST to convert the events POS file to a GPX file. Open Geosetter, browse to you photos and at the bottom-right pane load the GPX file. This will load the waypoint events. You then pick one of the events and the corresponding photo. It then correlates all the other events and images together. Once you have saved changes you will end up with JPG_original images and the regular JPG images that are the updated ones. You can also revert back to the old photos if you want. This user used a CSV file, but it’s very similar.
Hi,
Thanks for your guidance.
I tried the GeoSetter but the results were not great. The test flight was 362 photos but only 347 events were recorded by the rover and I could see the skipped events when I loaded the .gpx file in
GeoSetter. Additionally, the program only found 103 GPS coordinates for corresponding photos. I have attached a link to my .pos and .gpx files.
https://rickeng-my.sharepoint.com/:f:/p/wcrawford_cp/EkGC2uZ__dVAg0phL7cQcdgBRW9xK3p_nDQZk0szj3BOUg?e=3QeXKk
So there were events not written to the M2 logs? You might try using a GPX created from the full POS file.
Hi,
Using the full pos file worked, can I export a file (text, csv) of the photo centers? I can’t seem to find an option to do that.
I haven’t seen the option either. The images already contain the information so I am not sure what your workflow is, but you may not need it for processing. You can use exiftool, but t is a command line process so a little complex the first time, but once you’ve done it’s not bad.

You could also try to convert a KML from RTKPOST.
If you use Pix4D you can use the GPX.
I’ve never had to do this with correctly geotagged images, but would be interested to learn myself.
Found this, but haven watched it yet. Maybe another way to get a KMZ or KML.
Hi,
I’m using Trimble software (UASMaster) to process the images, photo centers, and ground control to get goereferenced 3d models for photogrammetric compilation. The program does not do well with georeferenced images and uses the photo centers to rotate and place the images correctly in the flight lines. Until now I have been paying another company to export the photo centers to a .csv file, I think they use Pix4D.