



Originally published at: https://emlid.com/reach-rs-field-tests/

Today we are happy to share Reach RS field tests conducted by Luke Wijnberg in South Africa.
Luke Wijnberg is CEO of 3DroneMapping and the flight operator in South Africa. He has worked as a surveyor for the past 17 years in both the aerial and topographic surveying industry. Luke specializes in all applications of RPAS mapping and its role in conventional surveying and has operated drones all over the African continent flying a variety of missions with both fixed wing and multirotor RPAS.
That’s not the first time when Luke appears in our blog. He was introduced to the Emlid range of products while trying to find equipment that could be transported easily in remote places and still offer accuracy needed for quality assurance. Since that time Luke continues being the dedicated member of Emlid community always open to share his experience and provide interesting case studies . We’ve sent one of the first Reach RS modules to Luke.


Luke tested Reach RS with LoRa radio by measuring one of his calibration sites. This will be a true indication to the LoRa performance as the site is an active construction area with big obstructions.
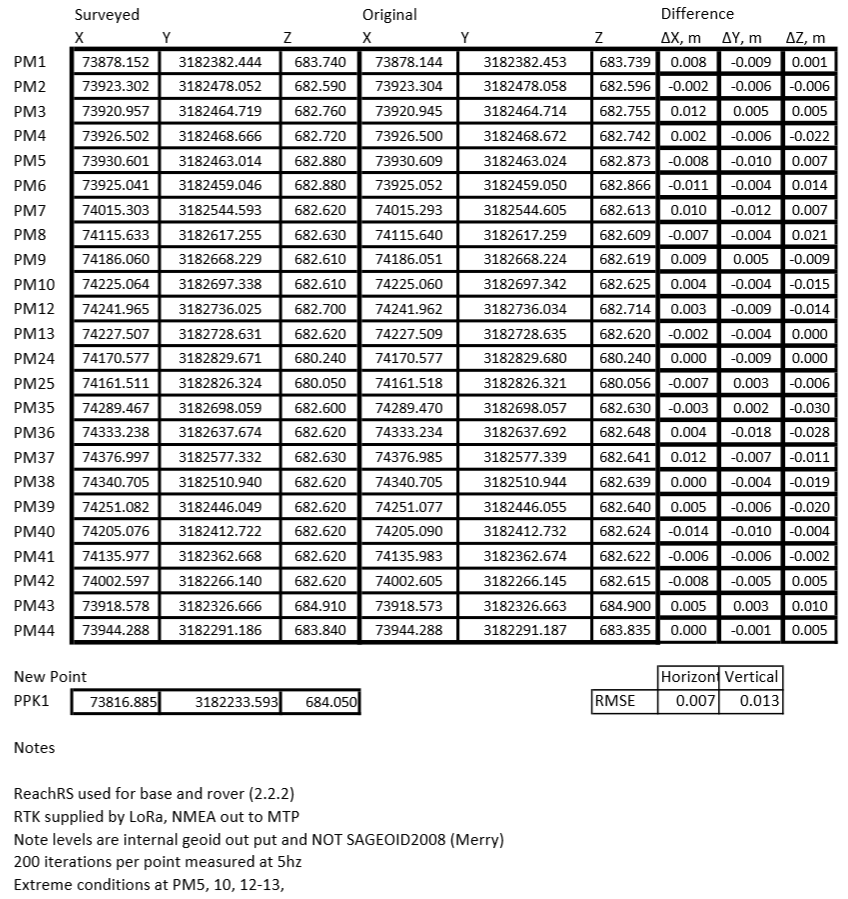
The area chosen is a place where 3DroneMapping is doing all the testing for everything from UAV work to precision leveling, traverse adjustments and resections. The benchmarks chosen were recently surveyed with a theodolite and reduced accordingly to MSL. Misclosure for the entire 2.1km long traverse of dual leg measurements was 0.001, -0.001 and 0.000m (ClassAA).
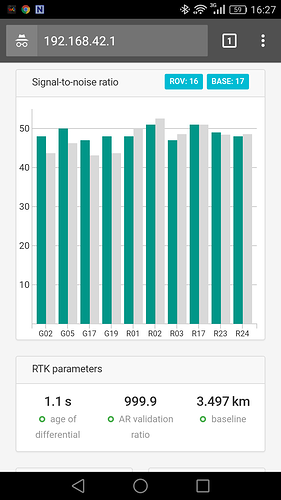
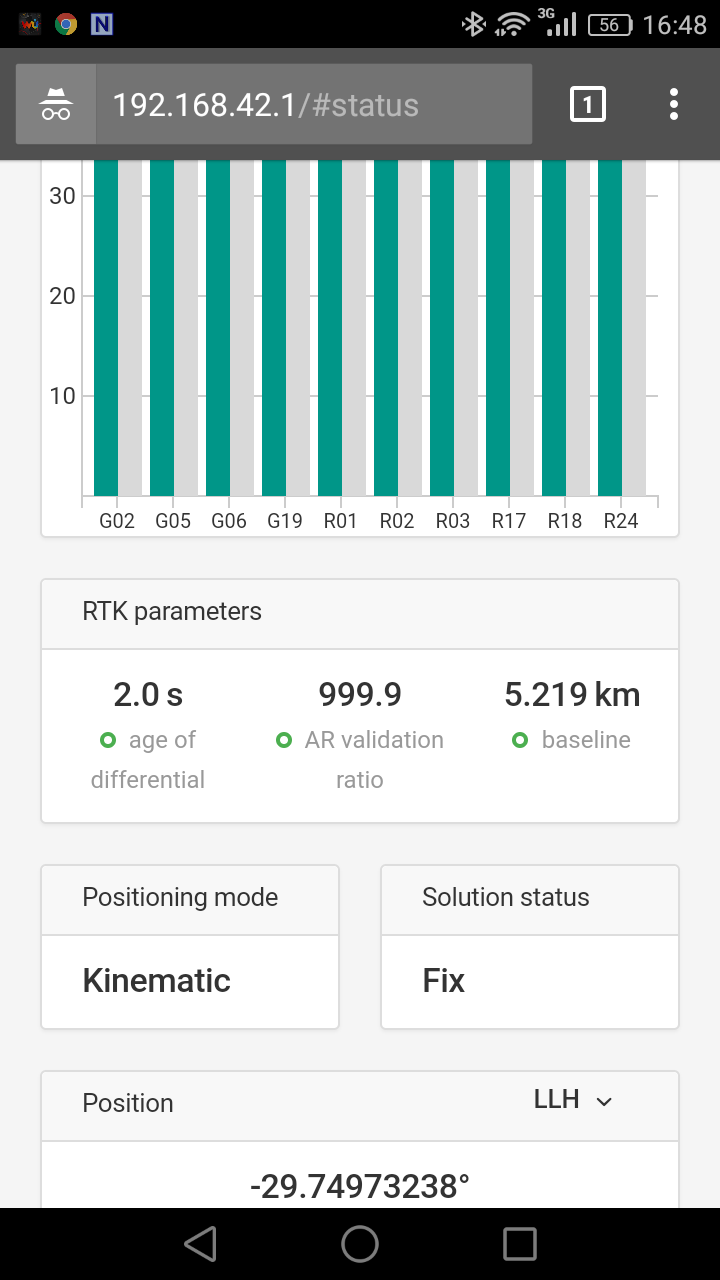
The base has been set up on an open and elevated position on a pre-surveyed point. Luke measured the offset and set the Reach RS to output GPS and GLONASS corrections at 9.11kB/s.
Luke’s other GPS units and poles were all out on various jobs so he has had to make to with a ranging rod and manual bubble. The offset came out to exactly 2.1m. The workflow was to set up the rover RS to pick up the LoRa data and export the NMEA solutions to bluetooth. Then via mock locations with Lefebure NTRIP Client, all points were recorded with Mobile Topographer Pro and then exported at the end. MTP allowed to add an offset, rename, export/import and average the final coordinate. Luke measured 200 iterations per point at 5hz and 24 points around the site.


There was not a single time of RTK communications drop. Even when down a very large embankment that was expected would block the signal.
Luke has been testing the range of the LoRa. This was not an ideal spot for this as he couldn’t easily navigate to a far point but from the 2 areas that he tested, he reported a fix in a fairly quick time. There are no control points at these locations but the point was to see how the LoRa radios would work and how well the fix could potentially be.
Check out the results: horizontal positioning RMS error is just 7 mm while vertical is 13 mm.
If you still haven’t joined our community forum, now it’s a great time to do it. We want to invite everyone to discuss latest Reach and Reach RS projects from our users (don’t miss the latest updates from @bide and @TB_RTK about their Reach RS experience) and share feedback about latest ReachView.
Reach RS is expected in stock in mid-April and now available for order.

