Today I made my own experiments with the precision. I compared first of all different measurement times, then different RTK solutions, which are available from the local NTRIP caster and also compared results from my own base station. The workflow was as following:
- Setup of the base station.
- Setup of rover.
- Measurement of the same point without moving rover away, but only restarting it between measurements. In such way position of the rover was not changing, but initialisation was made every time between measurements. RTK mode was set to Kinematic, not Static.
Base station setup:
I used large photo tripod (Slik Pro 700DX), which has bubble levels on the head. Base station location was on the random point. I measured coordinates of the base from RTK for 10 minutes. Took average fix. Then correction input was disabled. the height of the base was 192 cm.
Rover setup:
I used geodetic pole, which was attached to the tripod and leveled with the bubble level. Pole height with antenna was 2m.
Measurement workflow:
- Power on the rover.
- Let it connect to the hotspot from the phone.
- Access ReachView
- Setup experiment settings
- Take measurement
- Power off rover.
Now is the fun part. Experiments!
Experiment 1 - different measurement times
The purpose of the experiment was to check how measurements will differ, depending on measurement time. All measurements were taken in RTK mode, using VIRTUAL-RS solution from LatPOS (local NTRIP network). Autosave was configured for FIX with precision 0.005 m and PDOP 2. Measurement periods:
- 10 seconds
- 40 seconds
- 2 minutes
Results:
The difference between all points was not bigger than 7mm. I saw, that rover was shaking a bit, because of the wind. FIX was obtained in ~10 seconds after connection to the LatPOS. AR ratio was variable from 200-600.
Experiment 2 - different correction solutions
LatPOS has 4 different network solutions. I described them briefly in my previous topic. All points were measured for 10 seconds. Autosave was configured the same, as in previous experiment.
Network solutions, that were tested:
- SITE
- NETW-MAX
- NETW-iMAX
- VIRTUAL-RS
Results:
Max difference between points was 5mm. Fastest FIX was from VIRTUAL-RS solution, but it takes time to place a virtual base nearby.
Experiment 3 - corrections input from another Reach RS+
Rover was receiving corrections from my own base station, which was nearby. Corrections were sent via LORA. I measured the point 2 times with GLONASS AR on and off.
Results:
I don’t see any difference between 2 measurements. The distance between them is 2mm. FIX was obtained under 10 seconds in both modes. Measurements are on the same place, as in previous experiments. Difference is ~3-5mm. This means, that everything is working as suspected. No surprise.
Experiment 4 - corrections from the NTRIP caster with 4 constellations enabled
In demo mode we have 1 station, which is sending corrections for all 4 constellations of satellites ( GPS, GLONASS, GALILEO and BEIDOU ). So settings were set for receiving GPS, GLONASS and GALILEO corrections (as well as SBAS and QZSS, but I doubt, we have them here).
Results:
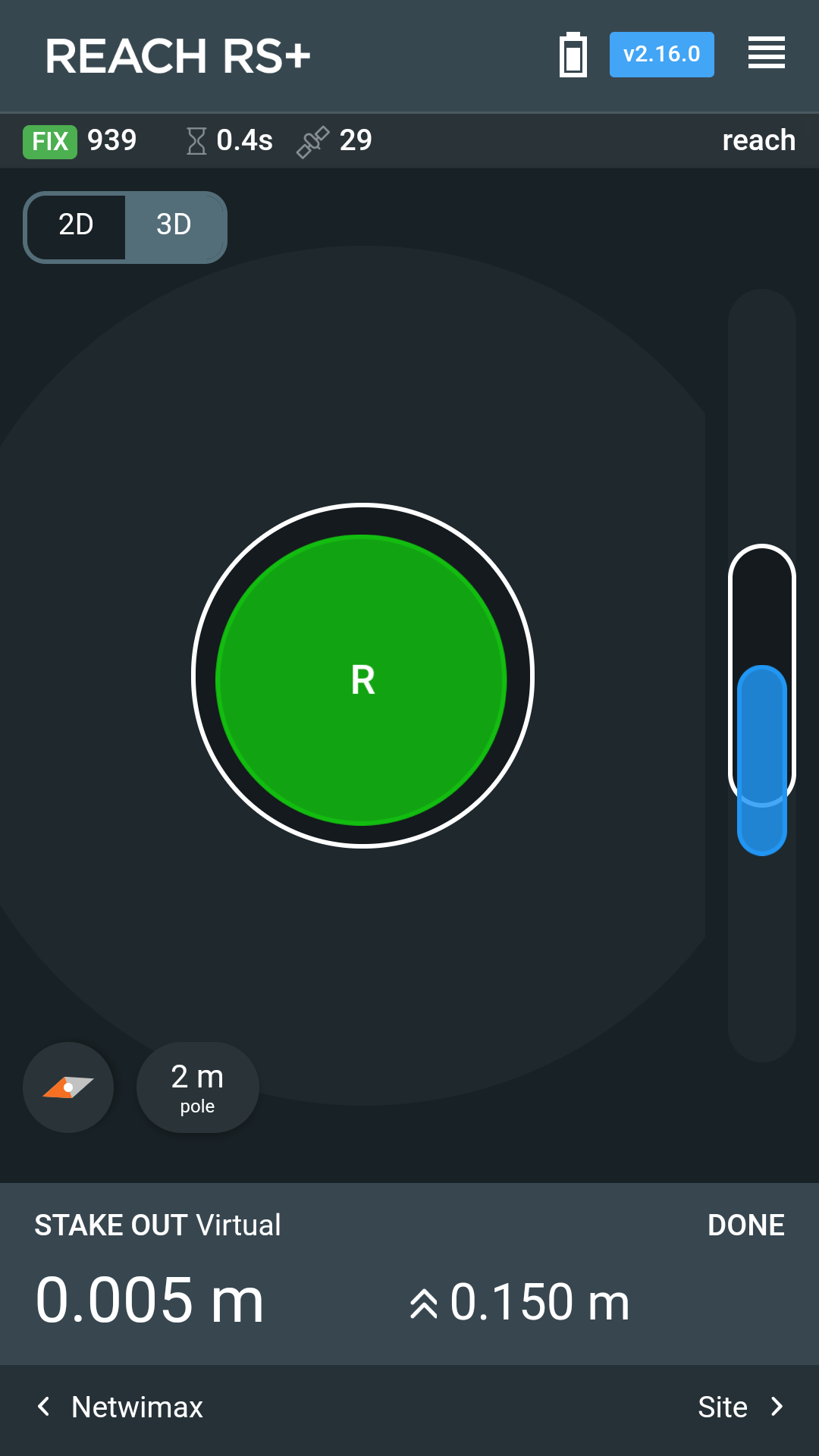
Difference in measurement was ~7mm from all other points. Also I saw difference of 15 cm in altitude measurement. This measurement was 15 cm lower, than all other measurements. There are 2 options, why it is like this: 1) Station is still in demo mode, so maybe it is not setup correctly, 2) Measurement is more precise, than all other. One student was conducting a survey of geodetic points around Riga and measured all points with digital level. His results were, that all GPS measurements were shifted. GPS results were shifted by ~5-7 cm in average from level measurements.
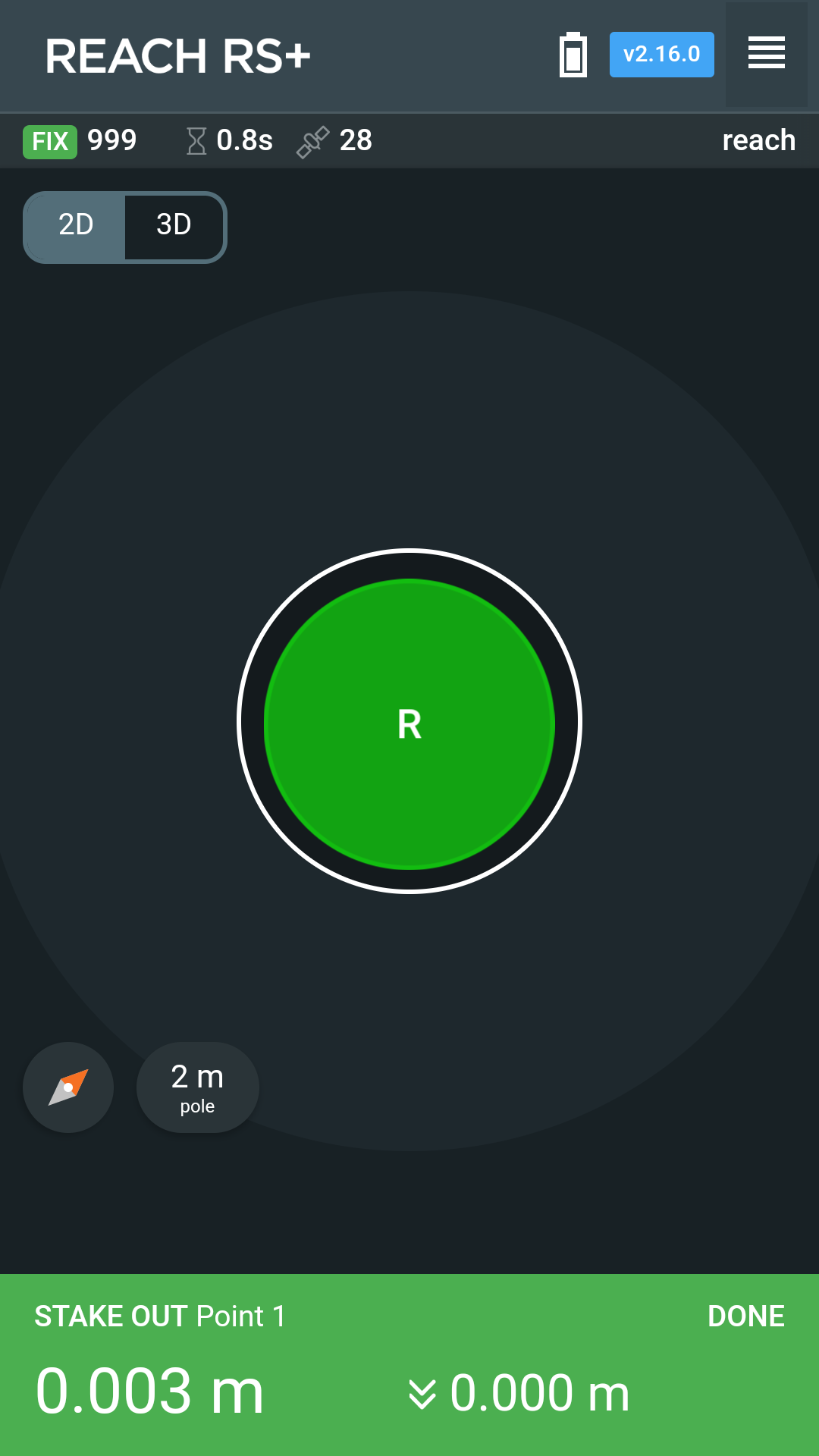
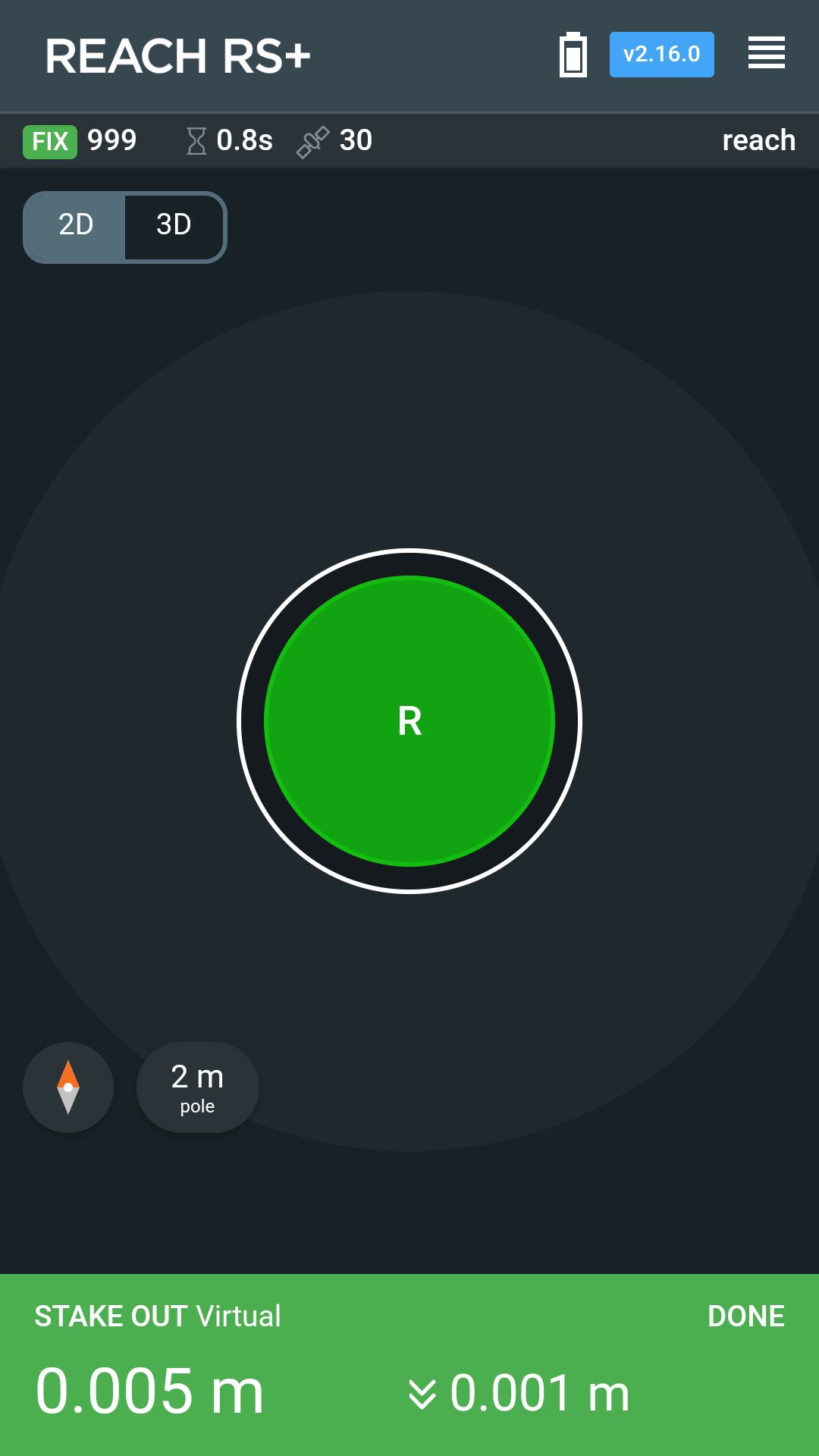
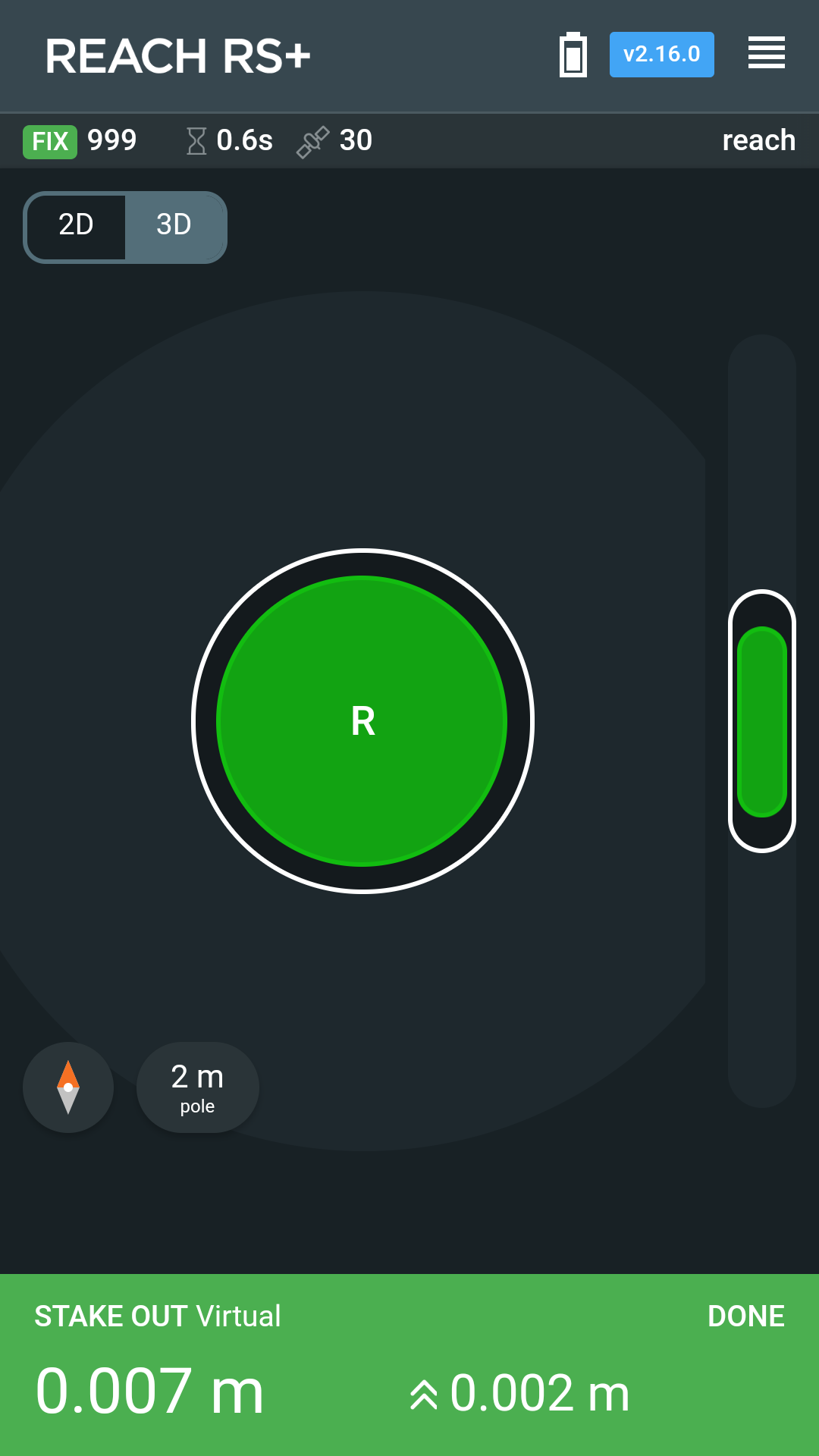
In total, I would say, that all experiments were successful. I really like the results and now I feel more confident in Emlid. I tried also new feature of stakeout and staked out all measurements in field. Looks awesome. In the end, some pictures from the experiment. The stakeout screenshot with the level shift is from 4 constellation experiment. Point from the second experiment was staked out with the 4 constellation correction.