



After some talks here on the forum, I decided to see how the relative precision of the Reach RS+ is.
I started by laying out and securing 40x30 cm GCP’s, and securing these with 2 spikes each to eliminate the risk of disturbing the point during repeated measurements.

Base setup on previously measured point on a tripod and tribrach. Rover on a pole, and stabilized with bipod. Measuring base and rover heights with a laser distance meter.

RTK-settings for Rover
SNR mask 35
Elev mask 15 deg
GPS Fix-and-Hold, Glonass AR on
5 hz
GPS, GLO, GAL, SBAS
All set up, I set out to do 3 measurements at each GCP:
- 3 sec obs time
- 30 sec obs time
- 120 sec obs time
For each observation, the rover is removed from the GCP and walked in in a ~3 m radius circle around the GCP. Then the Rover is re-positioned and re-levelled on the GCP.
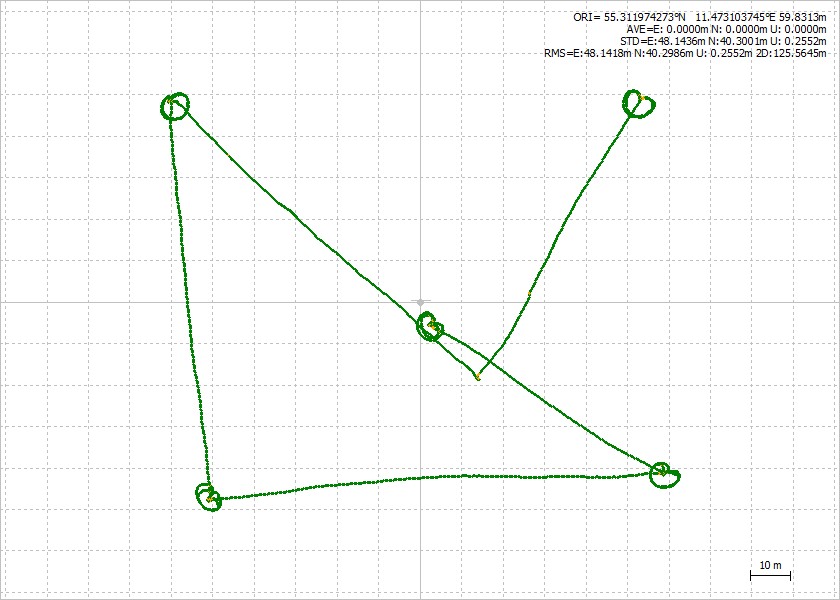
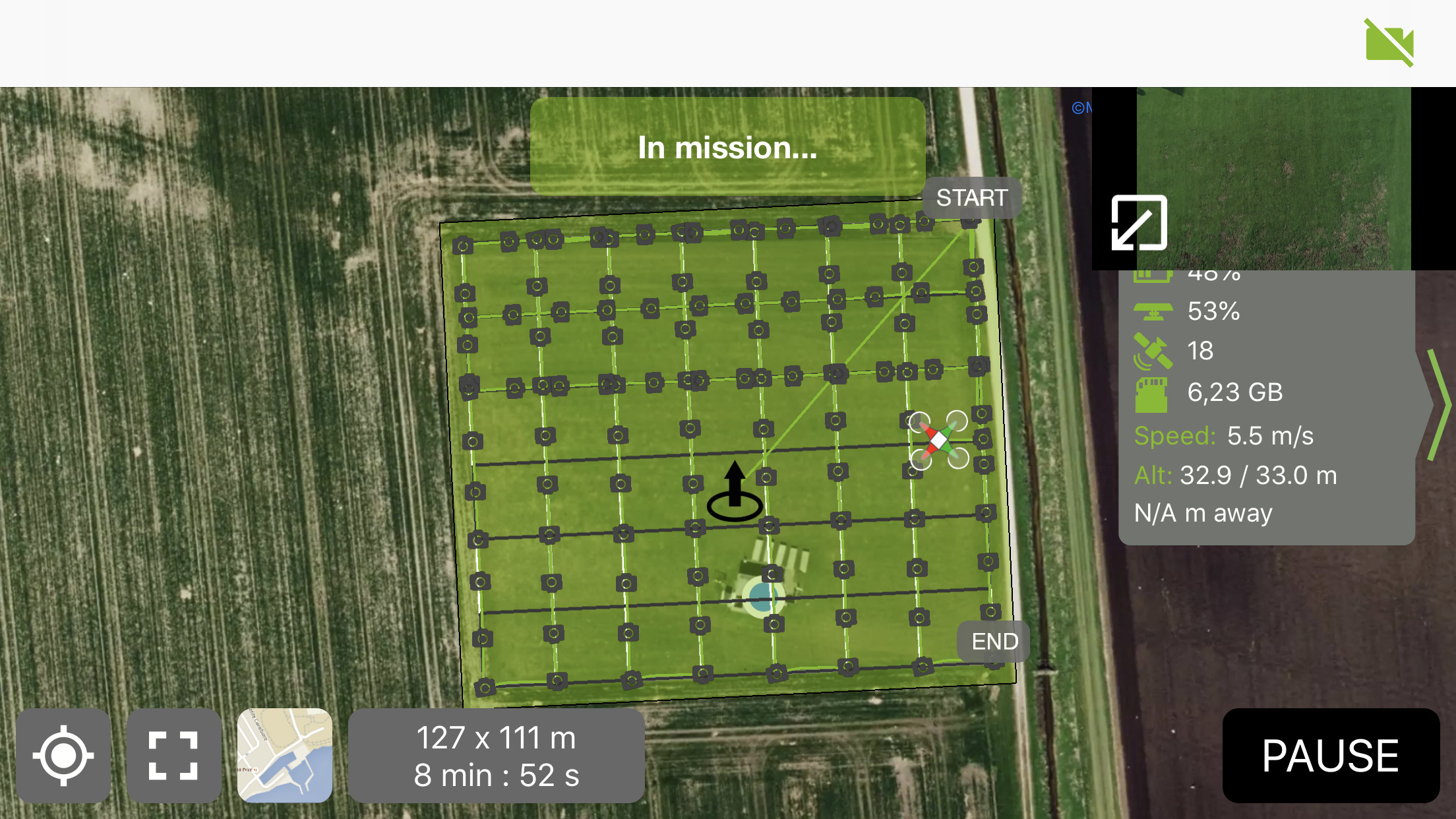
This is how it looks from above (though the results presented are from RTK, not PPK):
So, results.
I will try presents these in 2 ways. Largest difference from shapefile in QGIS, and then the RMS Error from Photoscan processing
First:
QGIS:
GCP 17: 3-4 mm difference
GCP 18: 1-5 mm difference
GCP 19: 0-2 mm difference
GCP 20: 2 mm difference
GCP 21: 3-4 mm difference
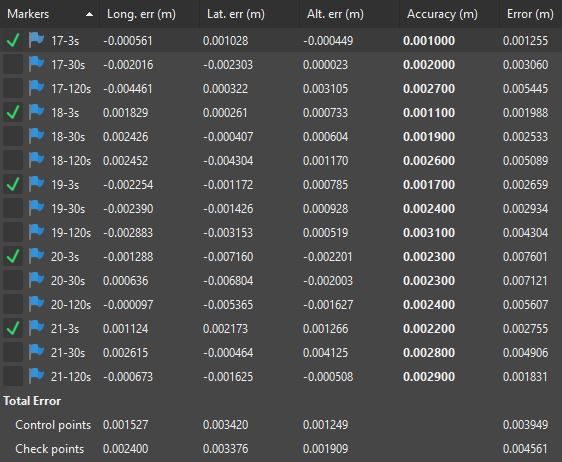
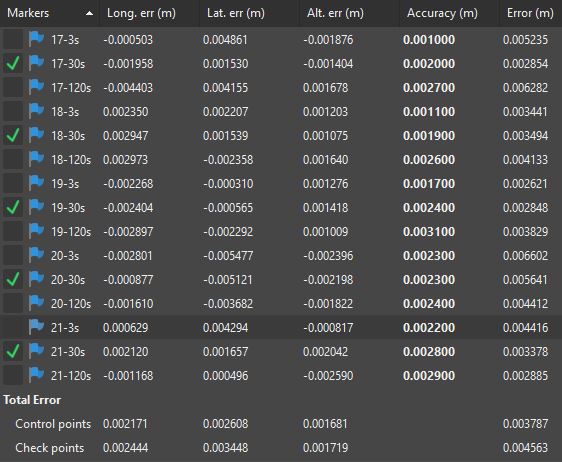
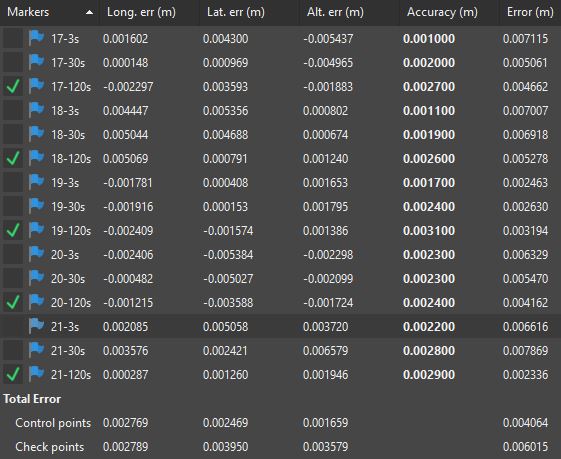
And then, Photoscan:
3s obs time, 3D RMS: 0.003949 m
30 s obs time, 3D RMS: 0.003787 m
120 s obs time, 3D RMS: 0.004064 m
Weather was
- few scattered clouds
- 4.5 deg C
- 1.5-2 m/s wind

Conclusion, well, I will leave that to people more experienced than me, but I am certainly impressed, given that some the errors could also be mechanical.
Files:
- base ubx: raw_201811171202_UBX.zip (2.2 MB)
- rover ubx: raw_201811171204_UBX.zip (7.7 MB)
- survey file, CSV: Relative Accuracy test-CSV.zip (763 Bytes)
- survey file, shapefile: Relative Accuracy test-Shapefile.zip (2.3 KB)

 Have you tried in the 2.16 firmware?
Have you tried in the 2.16 firmware? I did get an error but not sure why. Just a pure brain fart on the file format comparisons. Looked at a different file. Sorry for the confusion!!!
I did get an error but not sure why. Just a pure brain fart on the file format comparisons. Looked at a different file. Sorry for the confusion!!!
