Hey, no problem. I totally get your frustration. I was hoping we would hear some comments from Emlid or other users in regard to your SNR levels as compared to theirs. I suspect priority 1 is the new Edge and the Emlid guys are probably working 24/7 on it right now.
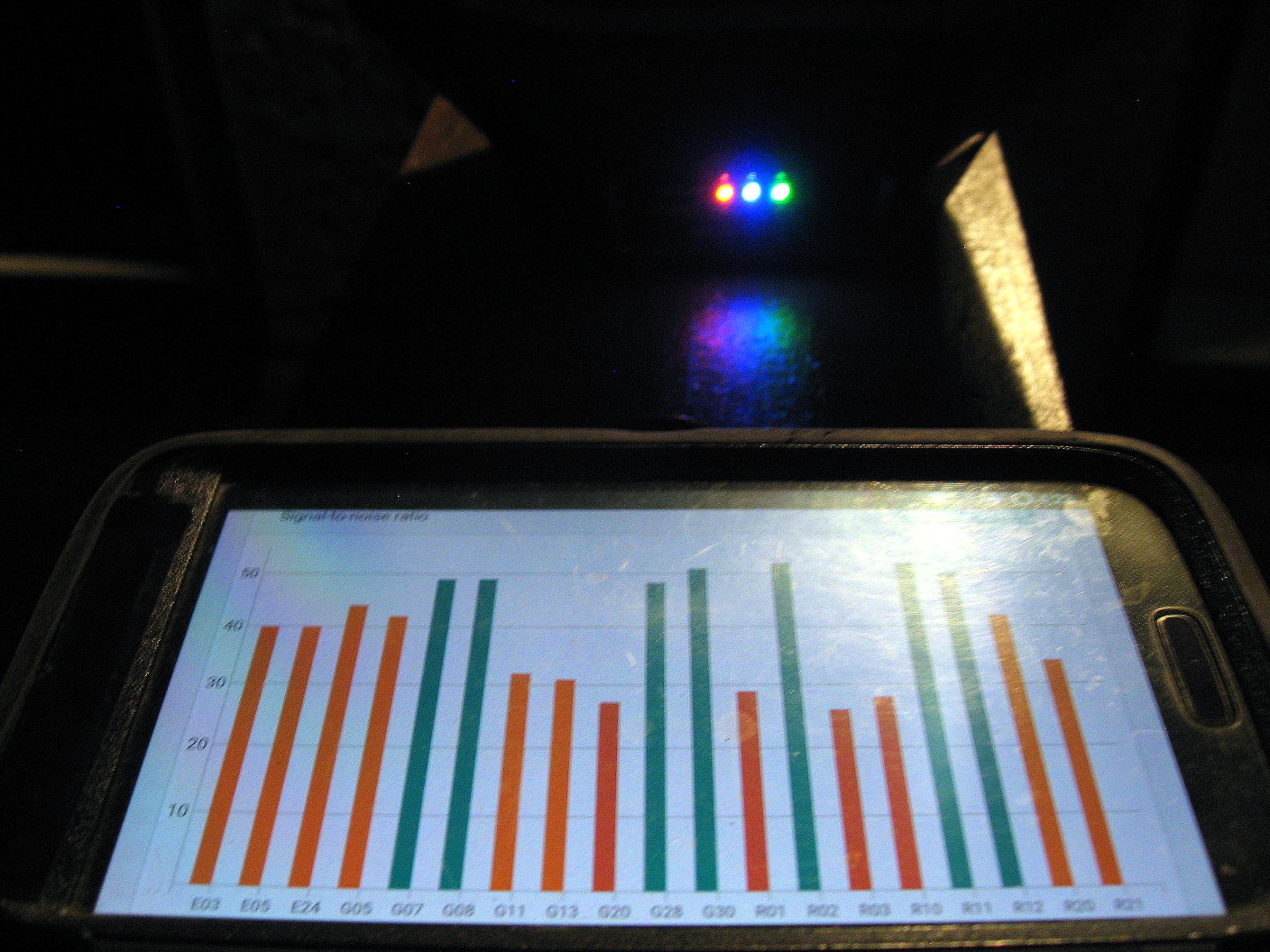
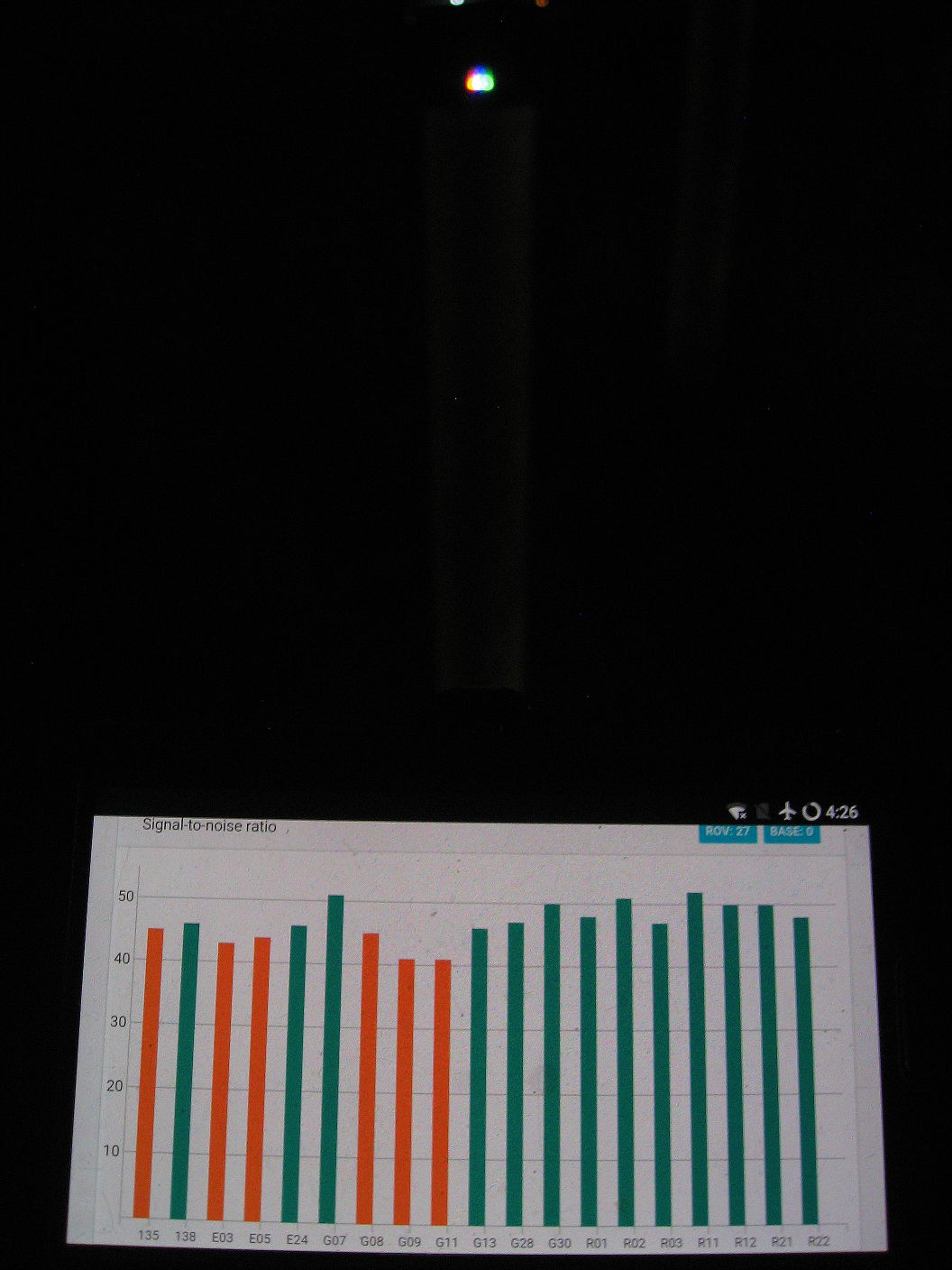
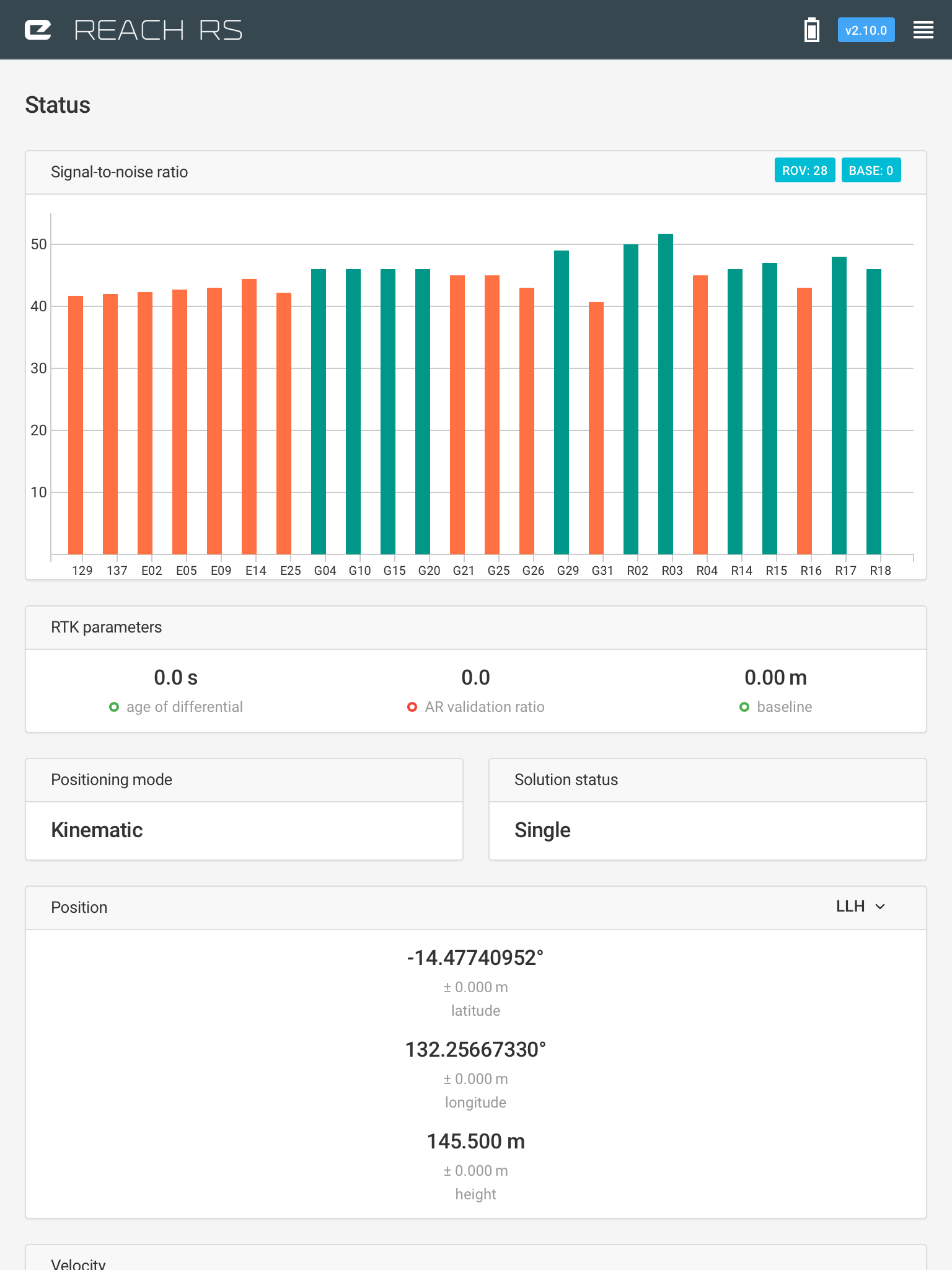
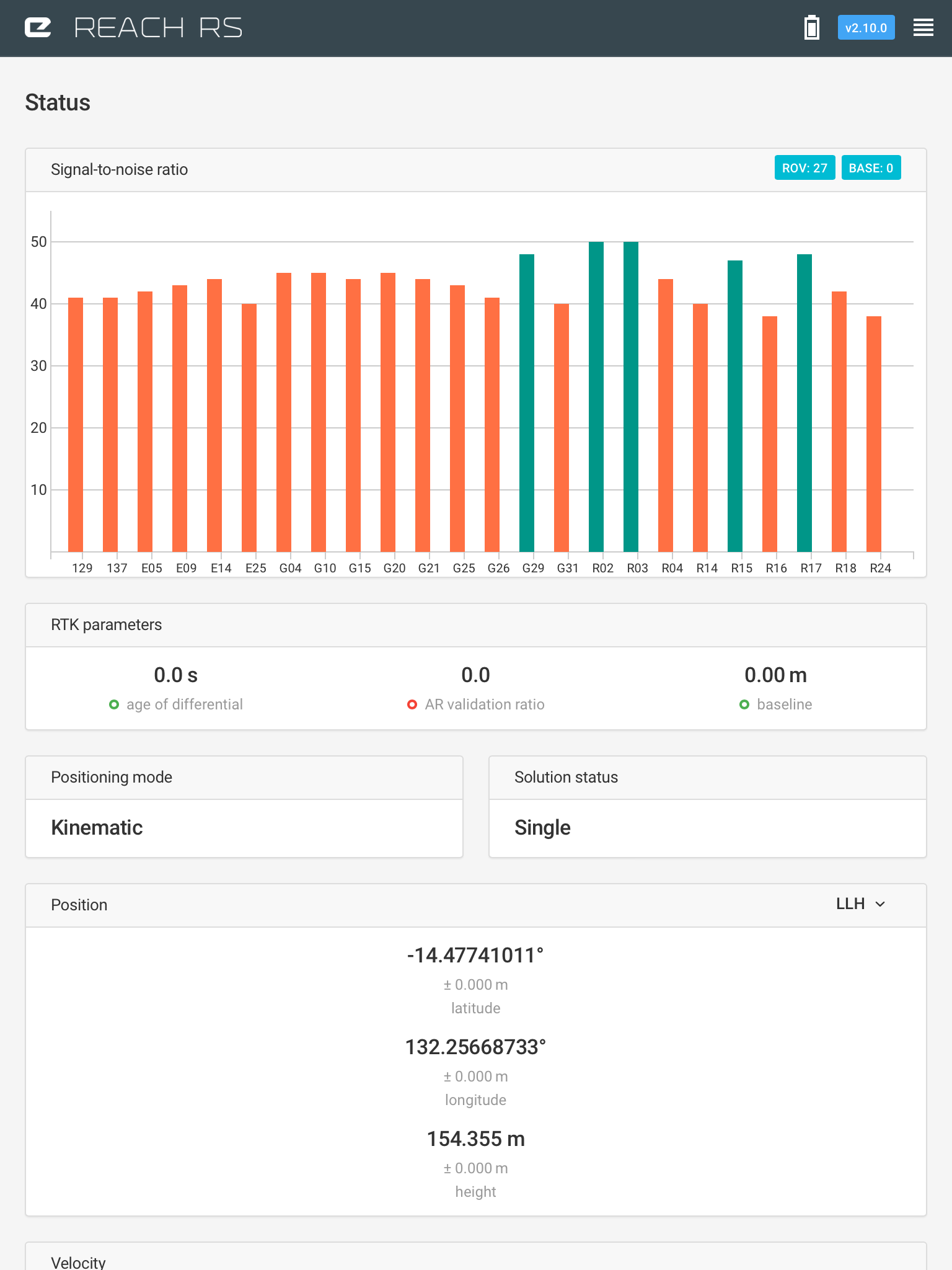
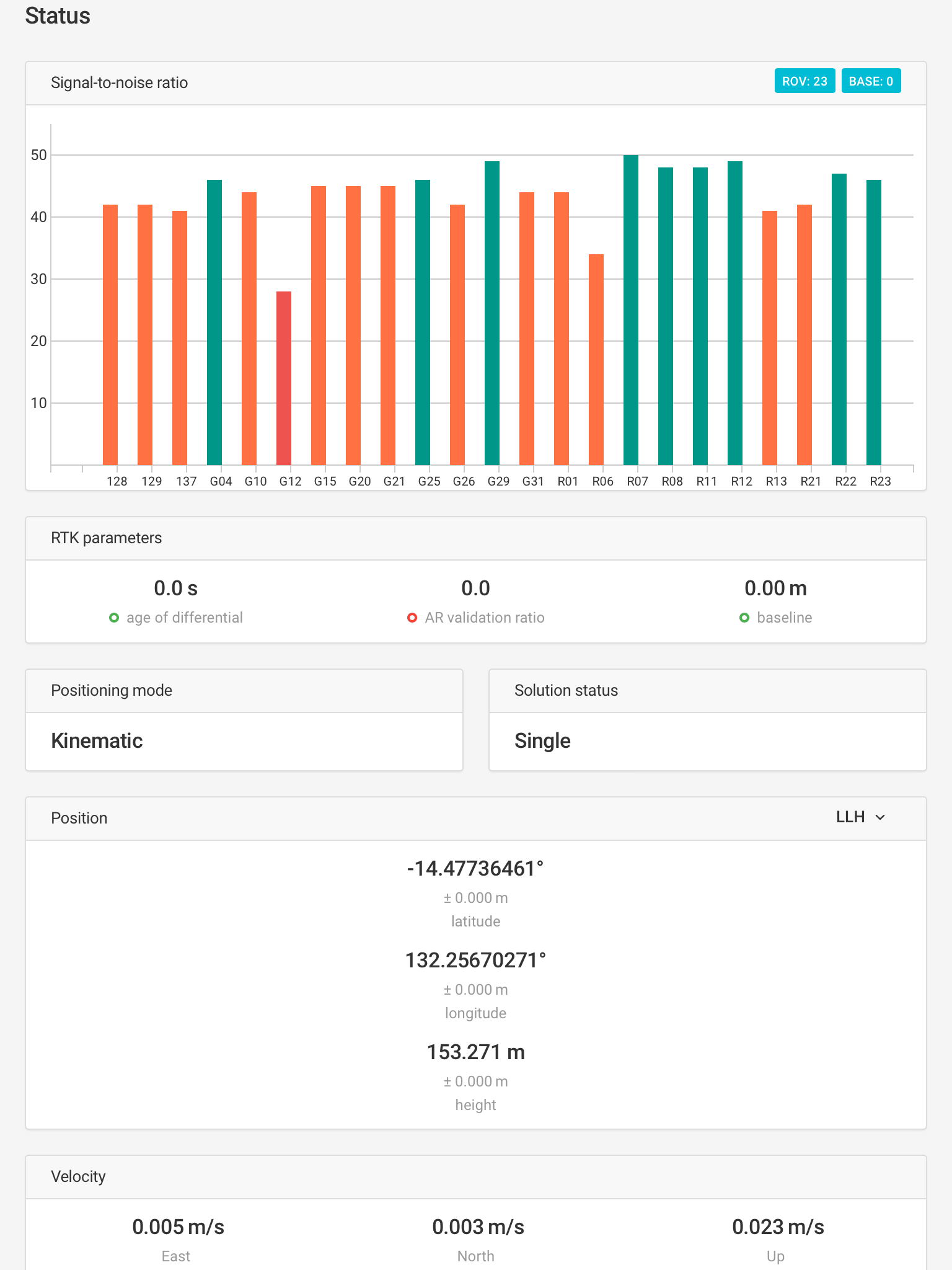
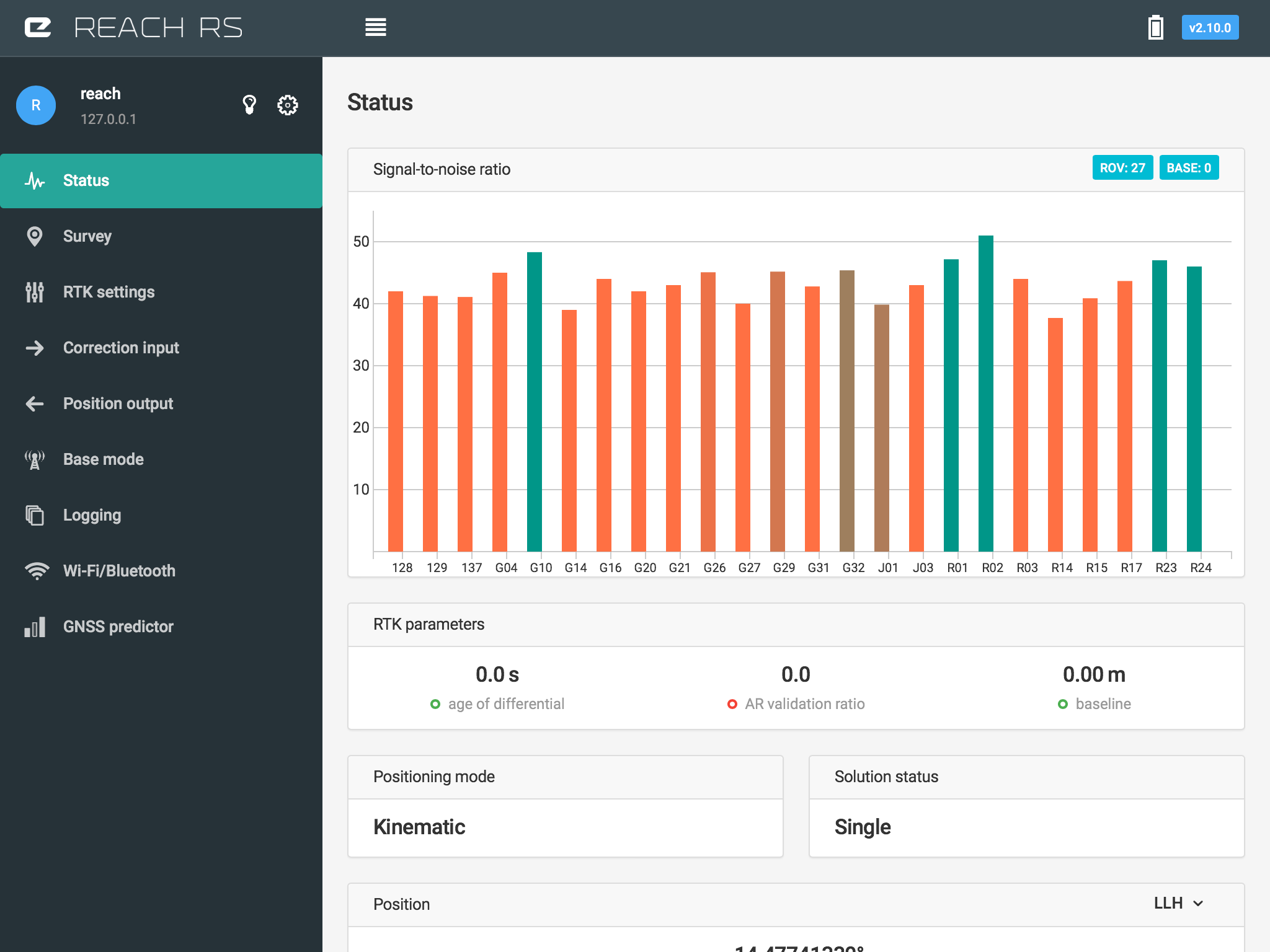
For you and for the others reading this, I powered up a Reach RS and took these pics of my SNR in different places, just for comparison’s sake:
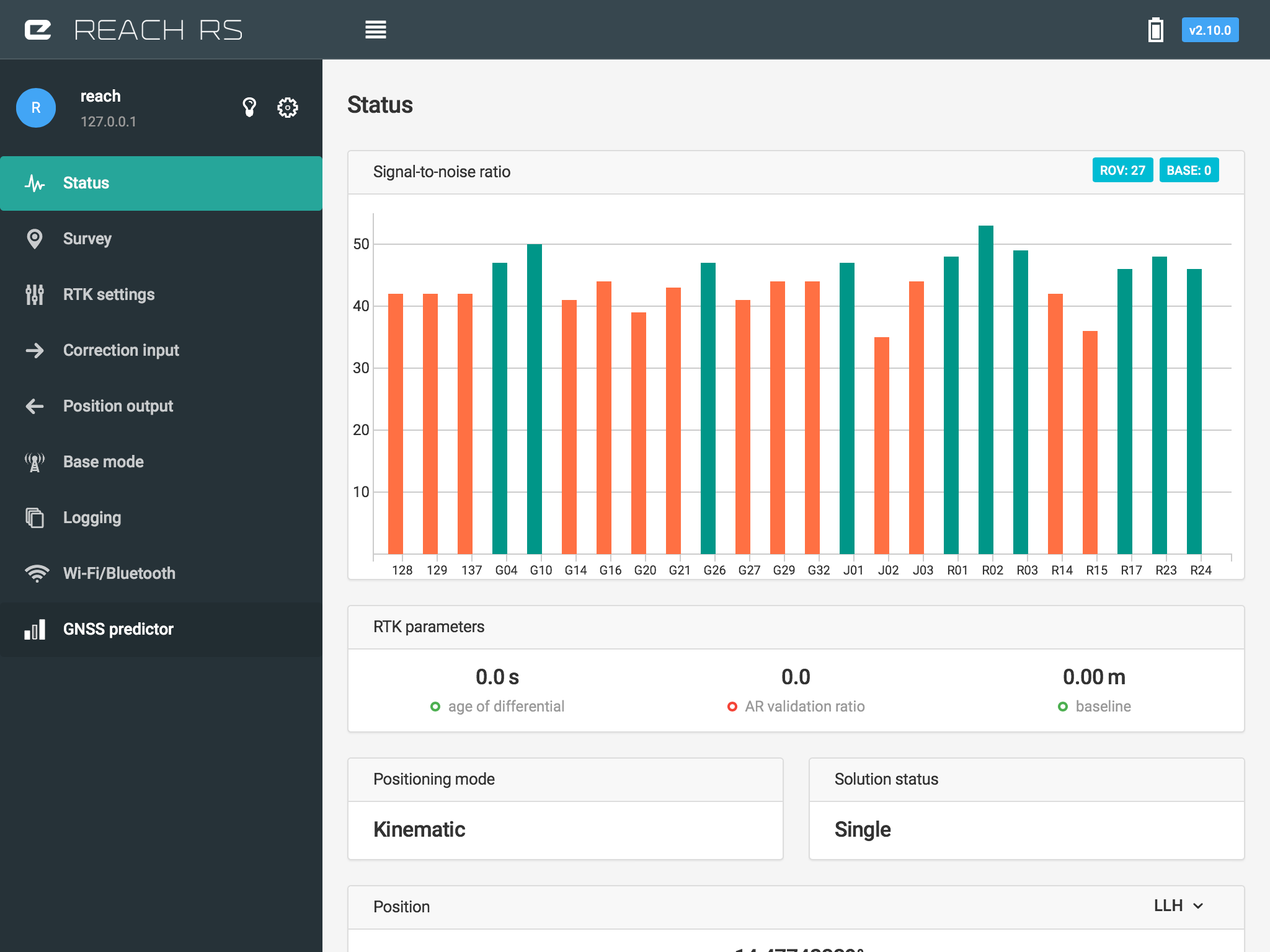
We see above that I have 5 satellites above 45 SNR(green) and 10 satellites above 40 SNR. This is looking pretty good.
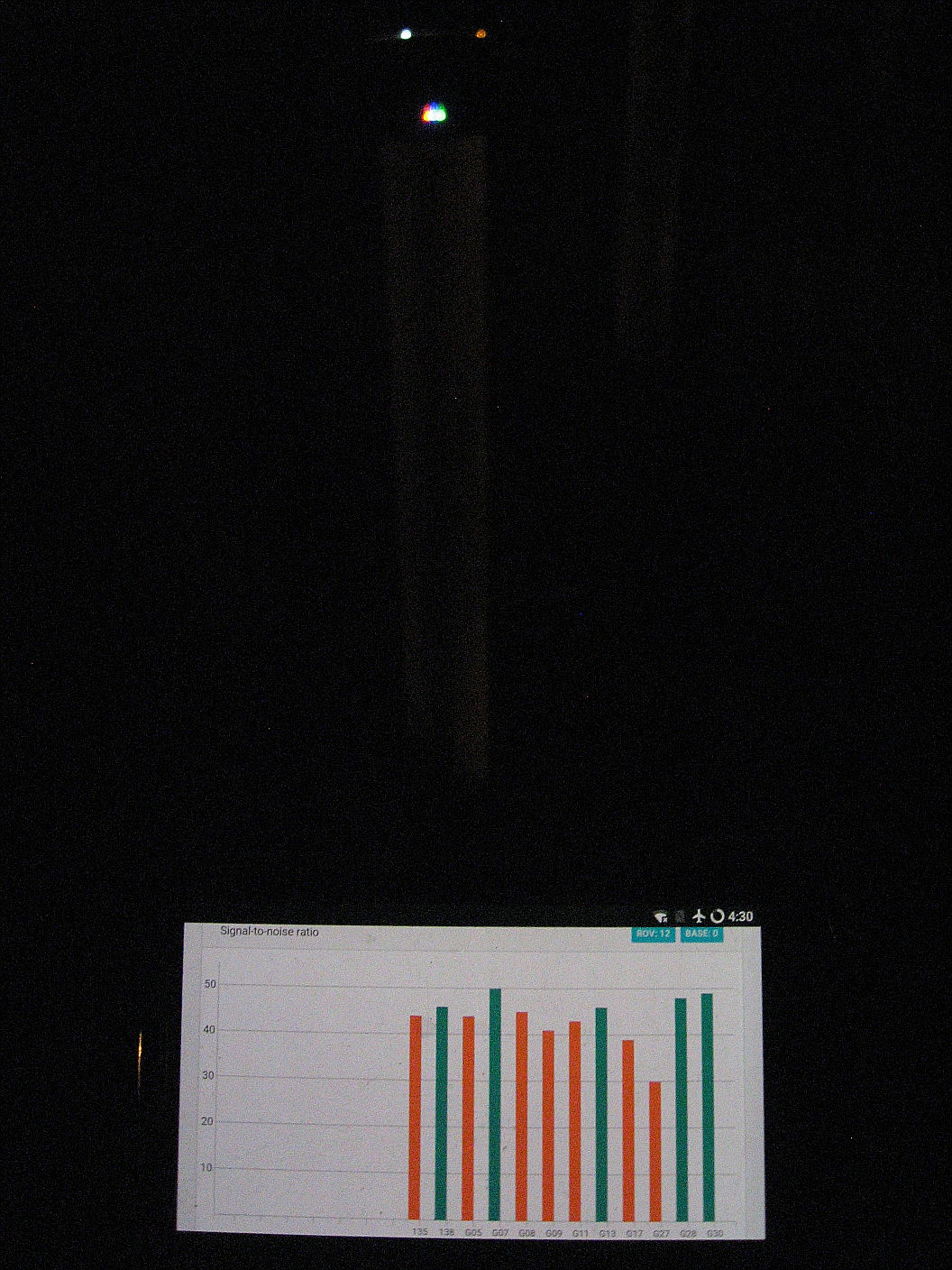
Now counting SBAS and GPS only, compare with your screenshot that I copied here from above. It is shoing 0 satellites above 45 SNR and 5 satellites above 40 SNR (plus two that are borderline):
You can understand that there is a fair bit of difference between our SNR levels, and that in your situation RTKLIB isn’t getting the quality of data necessary for a quick and easy fix. I hope we can figure out a resolution to your problem.
When configuring the base station too many messages have been selected which resulted in radio link overload and spikes in age of differential. Very heavy ephemeris messages are enabled at 1Hz, while this data is already present on the rover and is not required for RTK work. These messages are disabled in default configuration.
This had main impact on the RTK performance.
Recommendation for the base station
Start with these settings:
1 Hz 1002 (GPS)
0.5 Hz 1010 (GLONASS)
0.5 Hz 1097 (Galileo)
0.1 Hz 1006 (base position)
Disable all other messages.
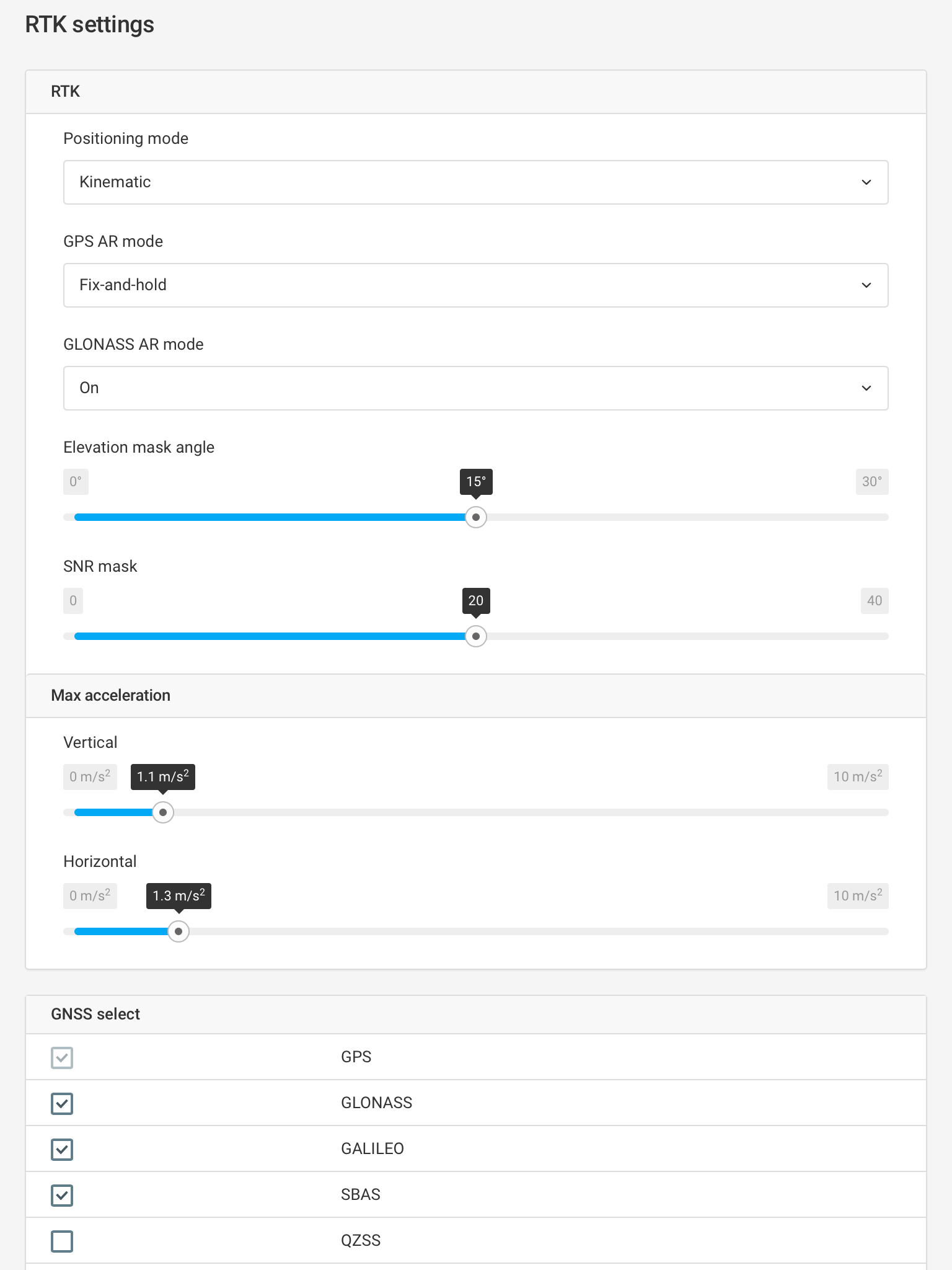
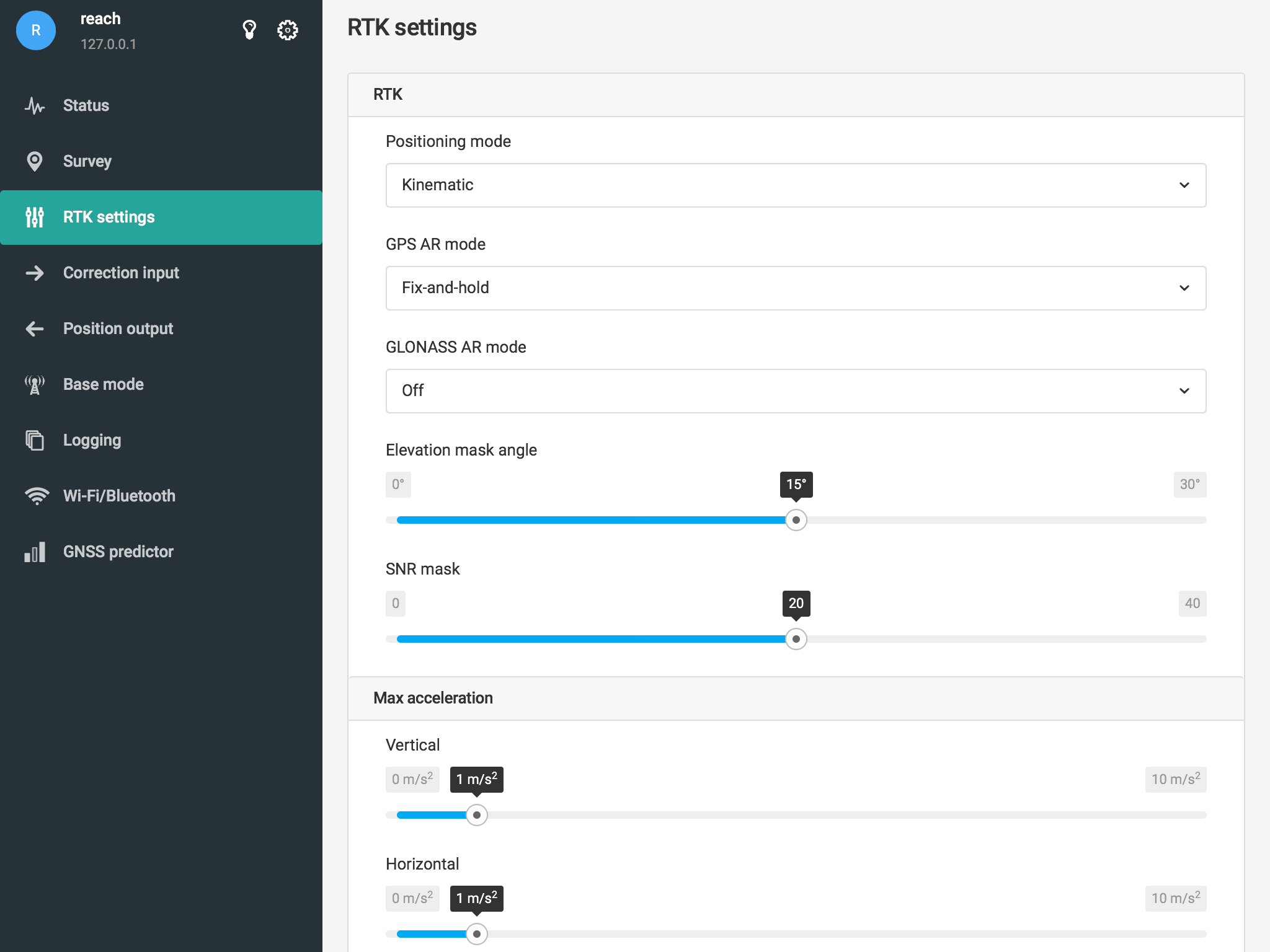
In GNSS settings:
GPS on
GLONASS on
GALILEO on
SBAS on
QZSS off
BEIDOU off
Use same GNSS settings on rover (galileo on, qzss off).
Make sure that the base station is located in an open area, rover handles obstruction much better than the base. Currently the signal reception on the base is very poor. Could you please post a picture of how it is installed? Maybe there are some transmitting antennas nearby that jam GPS?
Are you open to post-process your data or are you looking for real time RTK ?
I used EZSurv to post-process your data, it is a very simple PPK software package.
I upload your rover171123.ubx file with your base file and clicked on the process icon.
first the software downloaded ARGN closest base to compute a fixed site for your base
then it processed over 95% fixed epochs for the rover (using your corrected base file)
It took me about 3 minutes to get the results! No special settings, just worked straight out of the post-processing software install!
EZSurv post-processing software is an easy to use post-processing software and works straight out of the install!
see the below link for more info on the product
EZSurv will PPK UAV file, GCP, as well as features & attributes data collected with compatible data collection mapping software.
If you would like to give the software a try, let me know (or email me using the link at the bottom of the web page I refer to, see above).
If you are ok to post-process, you can collect accurate GCPs very efficiently!
How to:
Turn-on raw logging on your roving antenna. Use the Emlid app to record your GCPs. The app should provide a file with GCPs + GPS time at which each GCPs are recorded (to record a GCP stop on the point 2-3 sec, take the point&time stamp, wait 2-3sec before moving on to next GCP).
PPK provides centimeter roving accuracy if you
have a base within 10km (on site base is perfect)
have a total log file duration of at least 30 min. (without obstruction)
If recording all your GCPs takes less than 30minutes, no worry, simply let the log file record until it reach 30min (without obstruction, make sure your antenna face the sky).
Then, you may use EZSurv to PPK your log file.
Export the PPK position (the export to CSV file includes time + PPK position for each epoch). So you can easily retrieve from the PPK CSV file your GCPs at centimeter accuracy.
If you have an Emlid module on the UAV that also logged the raw file, EZSurv PPK software will extract the camera time trigger from the log file. Thus after PPK your flight trajectory, EZSurv will interpolate each photo center position.
We will try that, although we really need the live RTK data out in the field. and this was the resaon we bought the Emlid Reach RS units in the first place.
We operated in very remote areas of Western Australia where very often there is no internet or mobile phone coverage. being able to verify results in the field is very important.
PPK can be performed right after the GCP data collection (while you are still in the field). So you can get accurate GCP position out in the field. All you need is a PC out in the field…
The PPK GCP position will be in reference to your base station position. So if you flight the drone and PPK the drone log file against the same base position, everything - GCP, flight trajectory and camera center position - will be highly accurate in reference to your base position (high accuracy relative to the base position).
Now your base position…
If it is not placed over a geodetic point, it might be +/- 2 meters if you compare it to the local geodetic network. Therefore your job will be highly accurate in a local network (+/- 2m off the geodetic network). So on the field you will know if the job works fine.
Back at the office you may want to adjust your base positon to bring your “local system” right on the geodetic reference (it is just a translation / translation vector of +/- 2m). To do that, you will simple PP your base position with a surrounding CORS, than re-process the entire job to end-up with final position relative to the geodetic network.
Steve,
Have you had any success getting your REACH RS to work consistently? I am in the same boat you were. I brought 2 Reach RS to mark GCP,s about 6 months ago. To date I have not been able to use them due to a lack of communication between the units. I managed to get them to talk and establish a base line last week. Thought i was the ants pants until I took it out into the field for a trial. Nothing, the units would not communicate, so back to square one.
I managed a base line of 600m, which is no where close to what I need (prob 2.5klm). Sometimes I regret this investment.
Any advice you have would be appreciated. I live in the NT. The annoying part is I used Trimble for several years and it never missed a beat. Like you, I just want the gear to work when you need it.
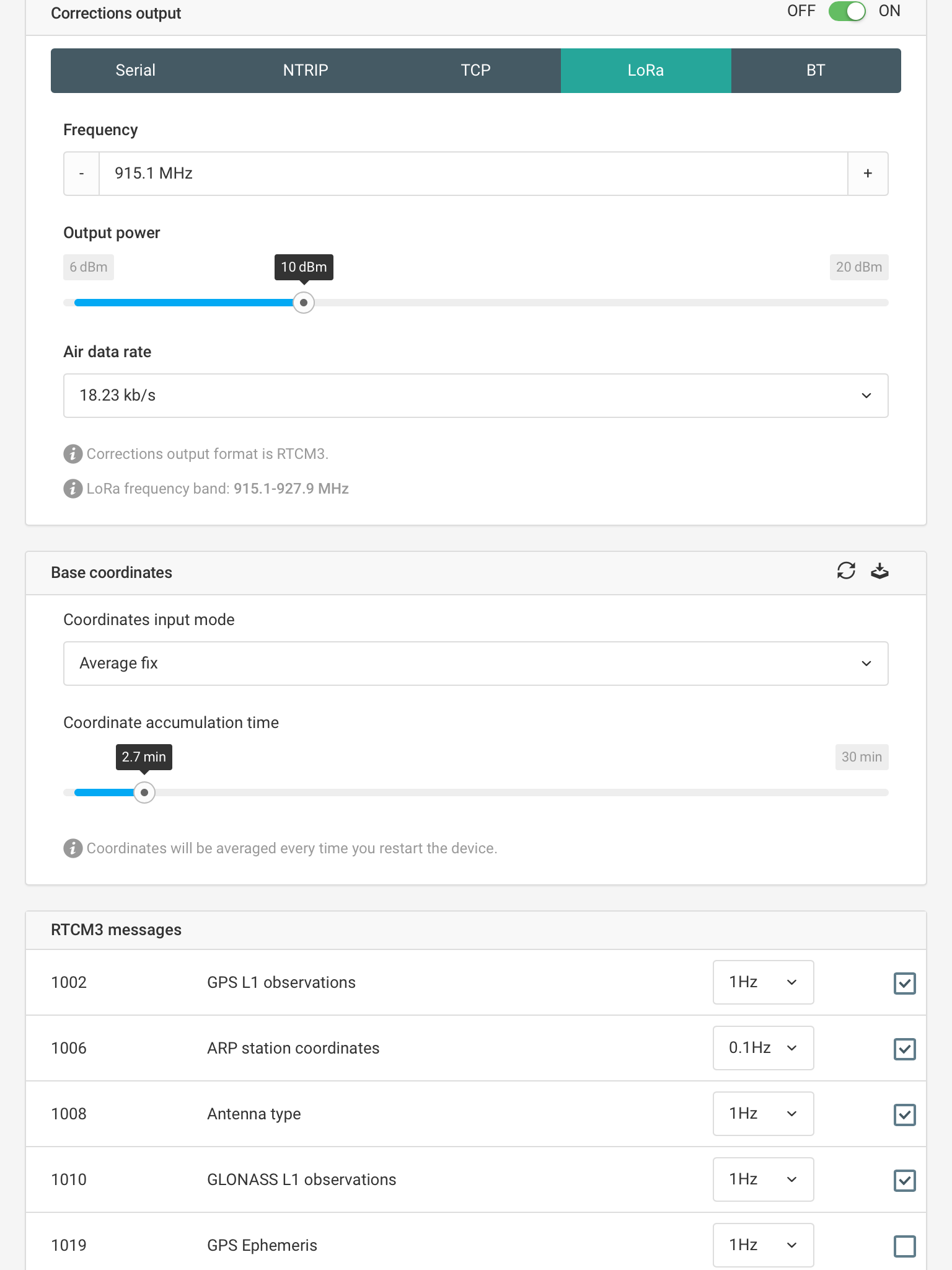
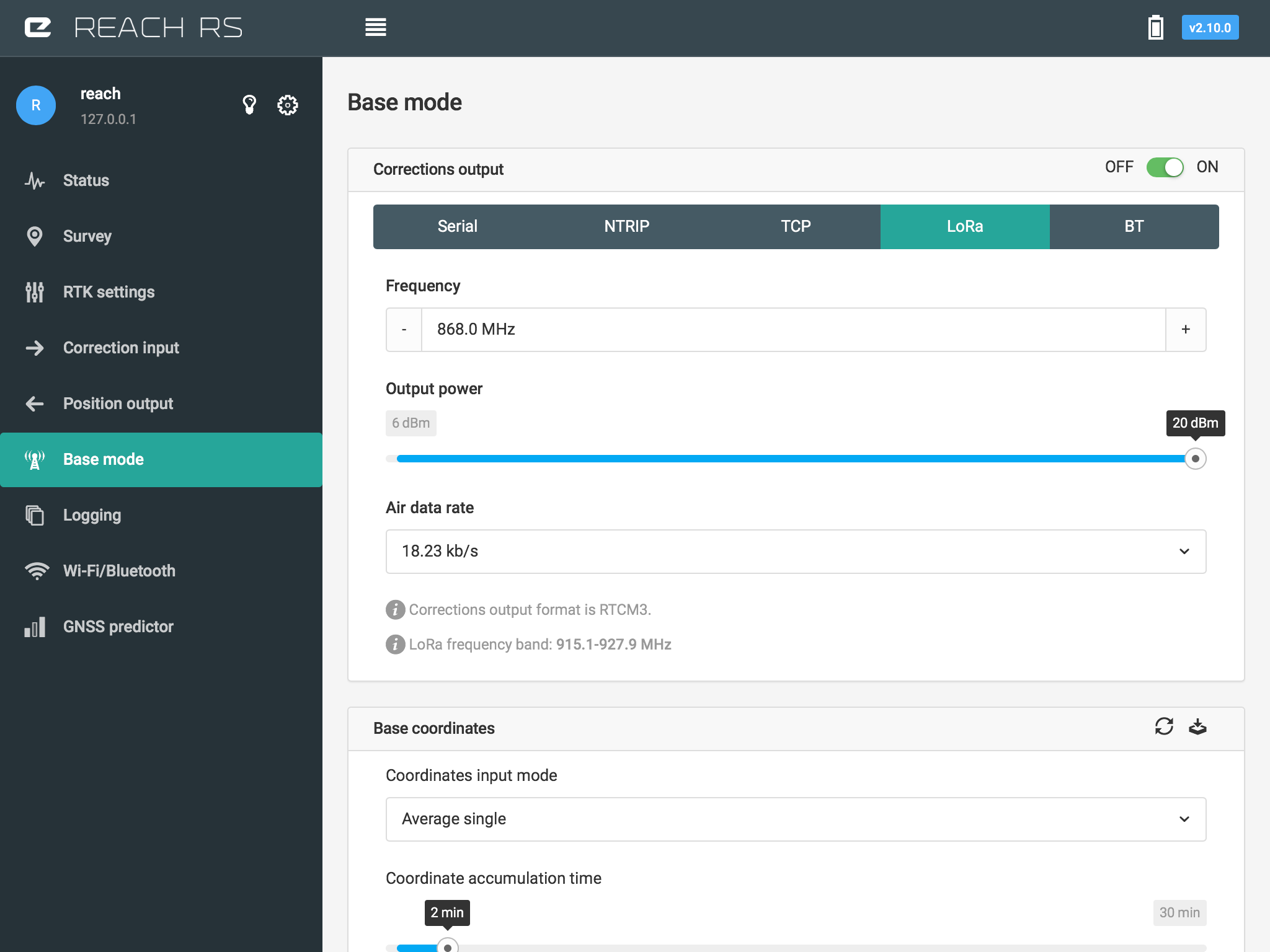
I see message 1006 (base station antenna position) is off.
You should try using just 1002 and 1006 msg , under base mode. And activate more, if you need more.
Also, i see ntrip is on. Are you using this at the same time?
I have tried all of the above with no success. I notice that in the status bar only the ROVER sats are listed in both the rover screen and the base screen. I remember both being displayed when we had a base line.
I tried using a NRIP caster but there is nothing close enough to work.
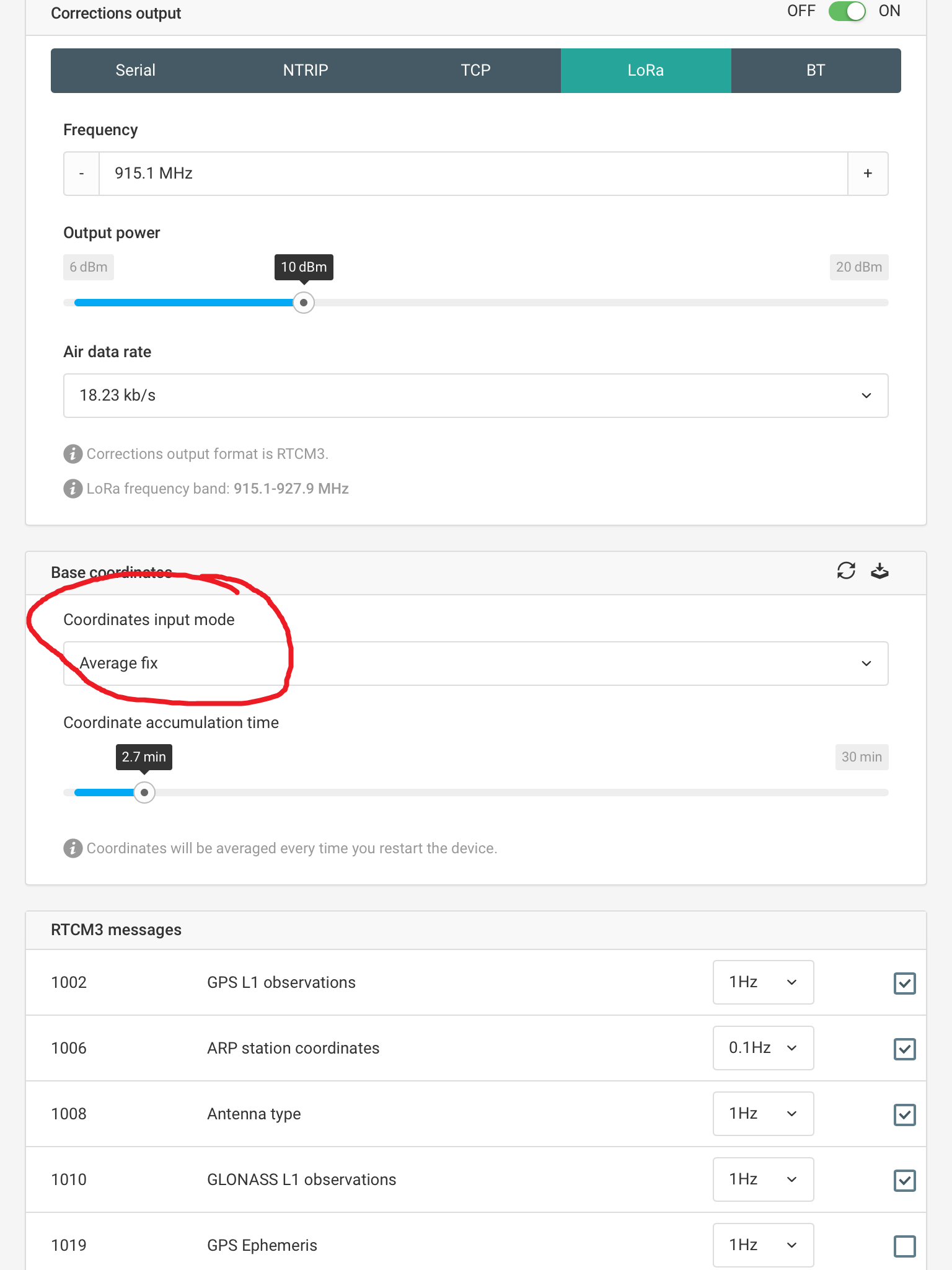
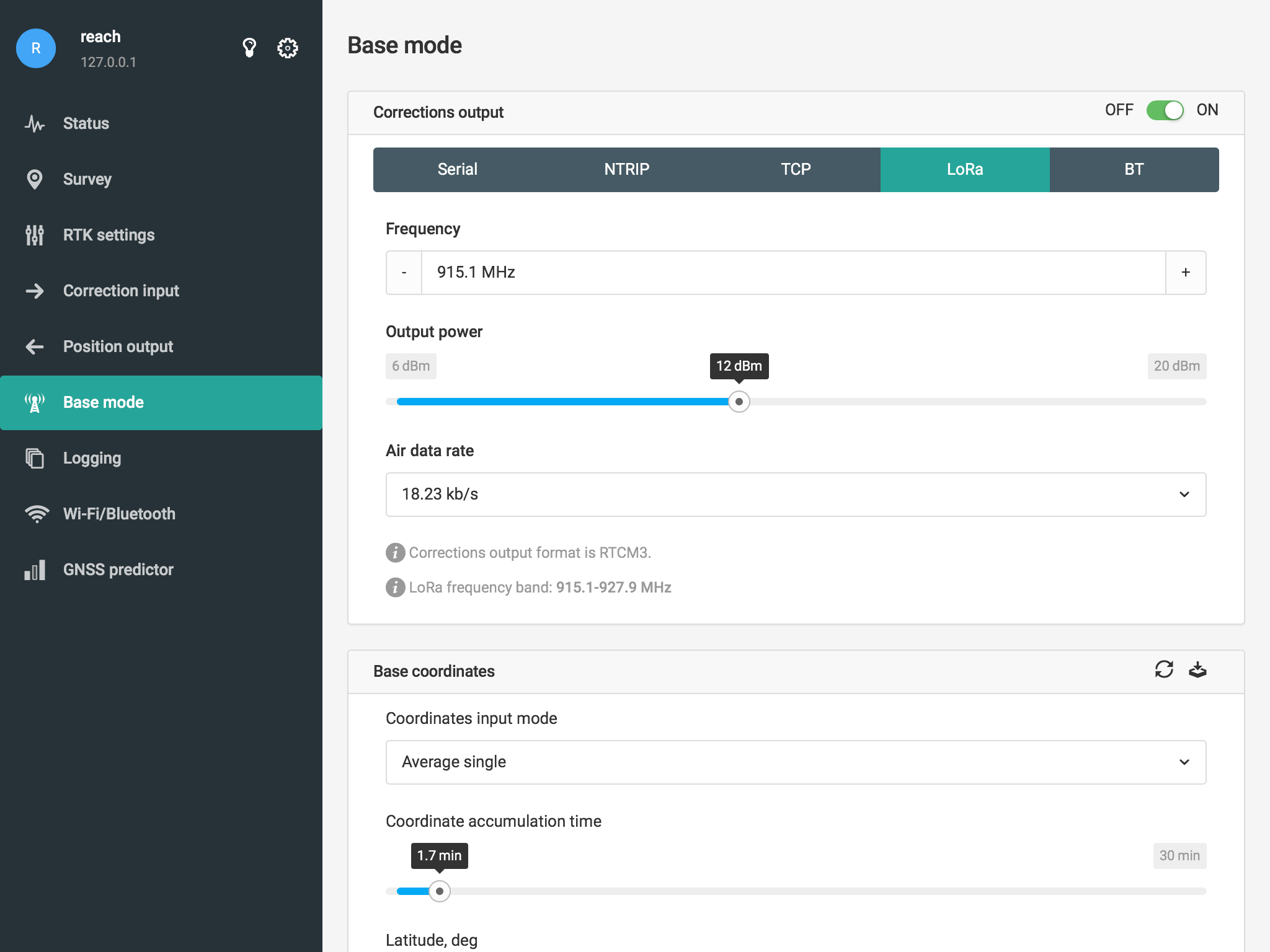
Here is you problem. Its set to average fix. But if you dont have any correction coming through to your base, this will never average a fixed position ,thus never output a baseline to rover.
Set it to average single or input manual coordinates
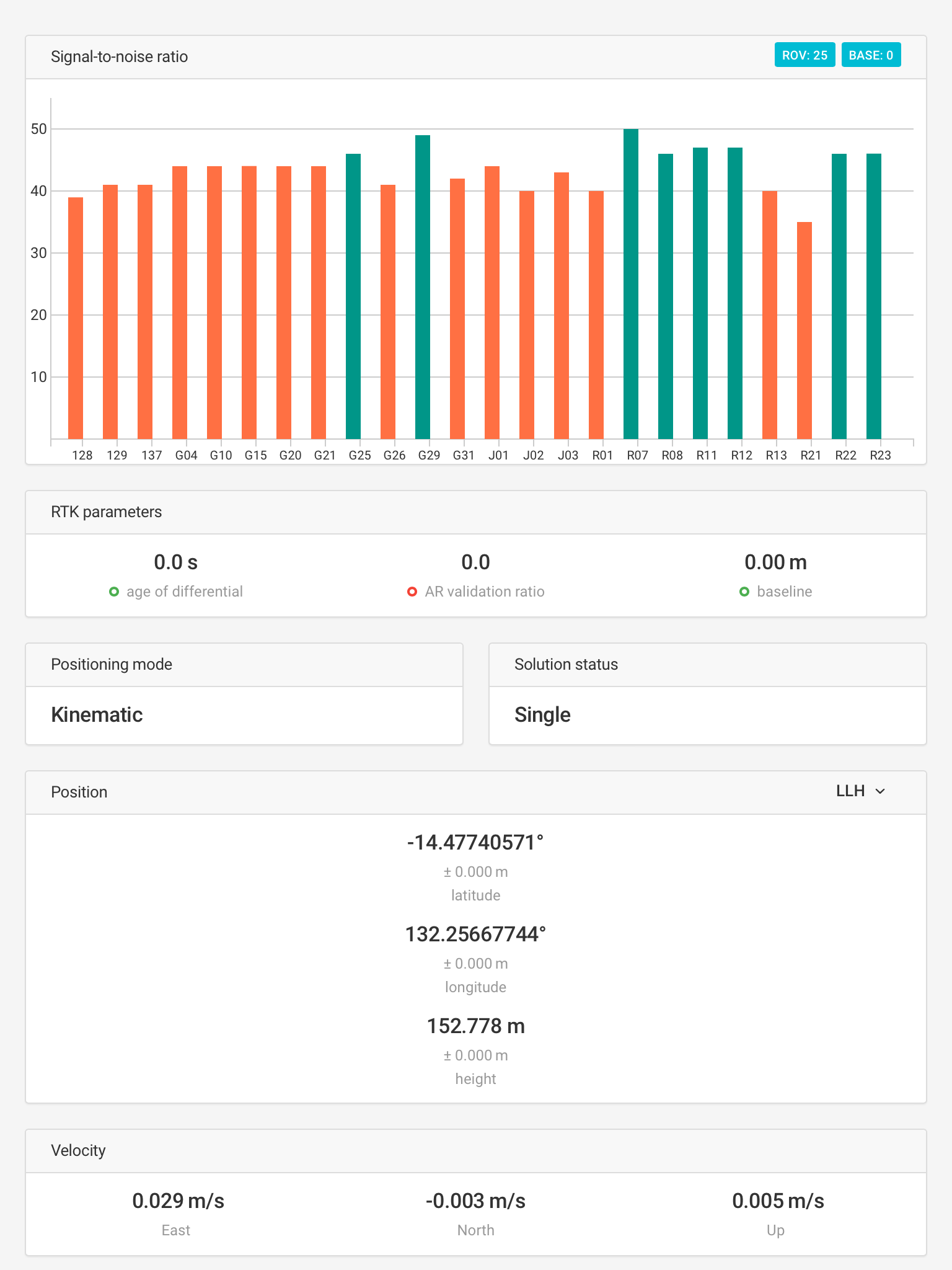
Still no luck. Set the base to average single and got base position. No information is getting to rover. In my Status screen it still shows only the Rover at 26 Sats but no Base sats. Same when either connected to rover or base. Is there anything else I can try? I appreciate your input.
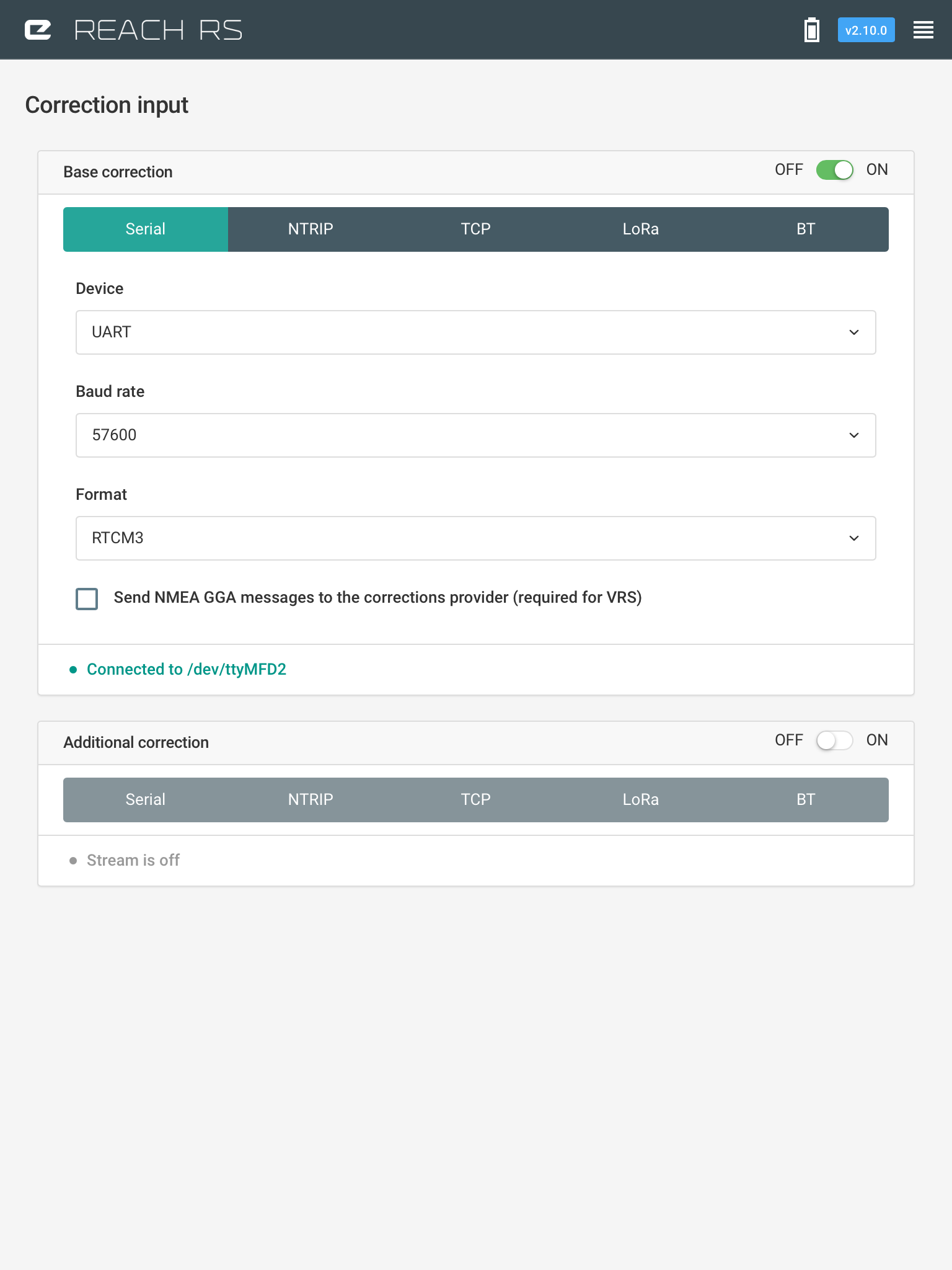
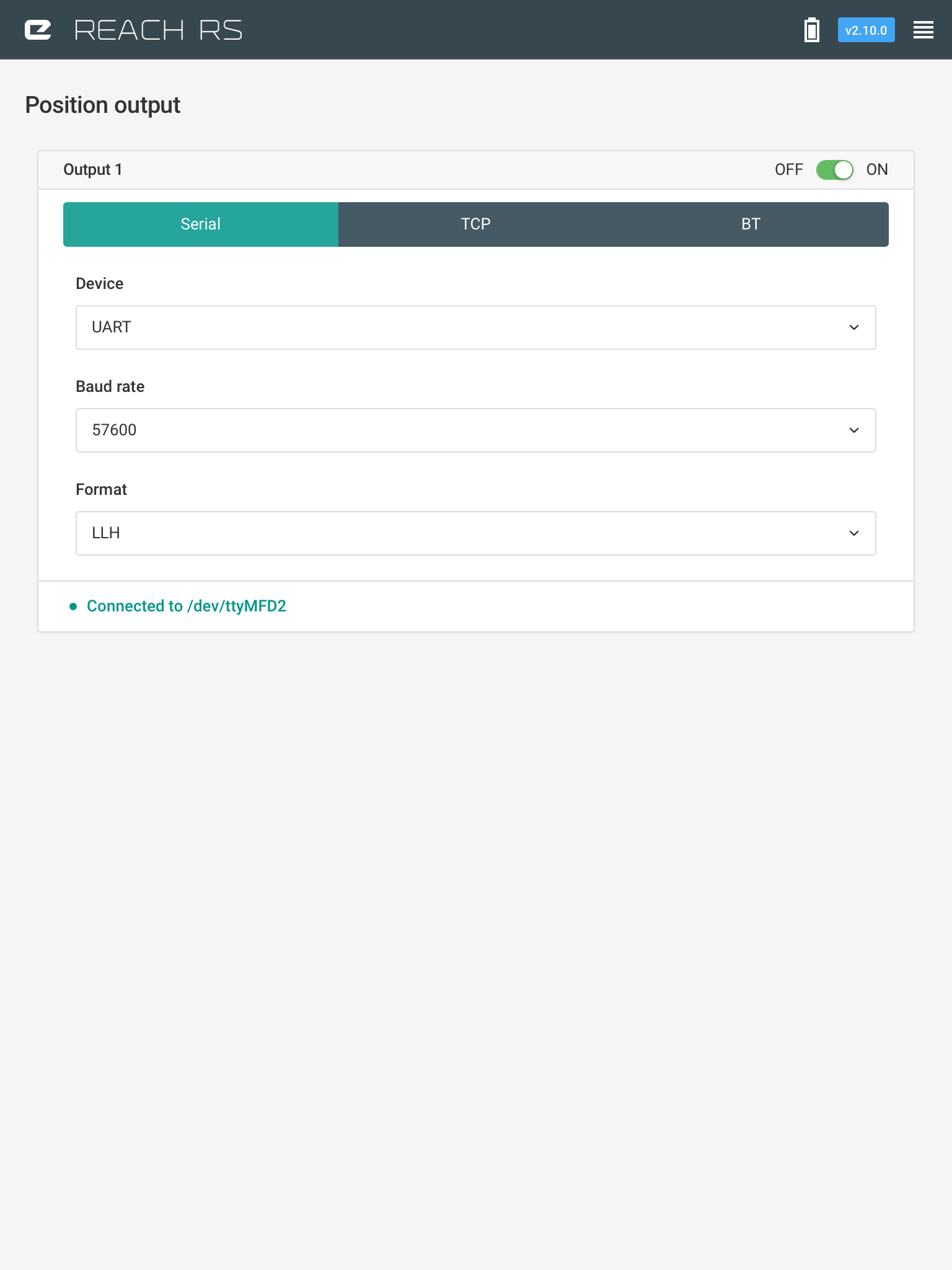
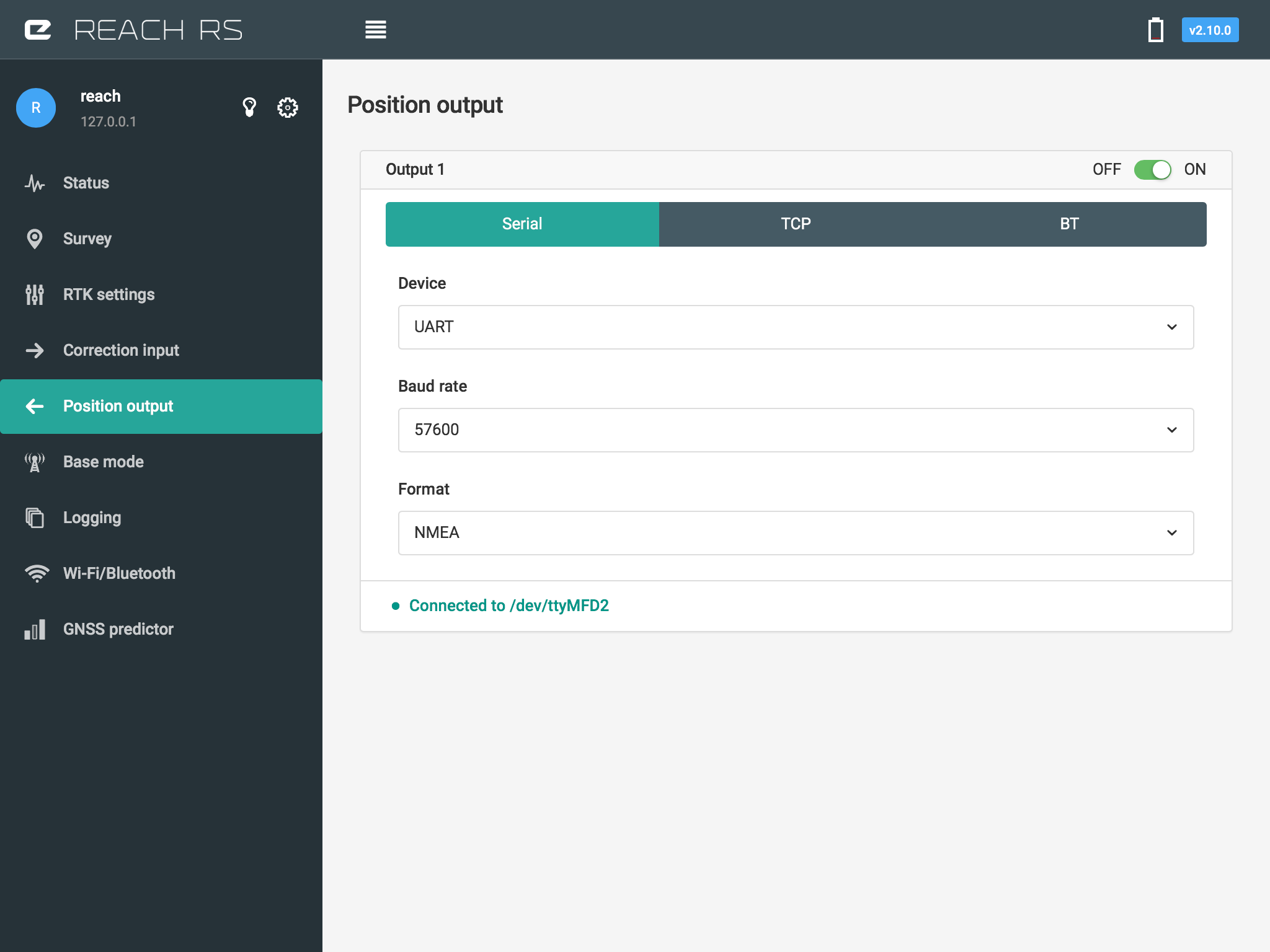
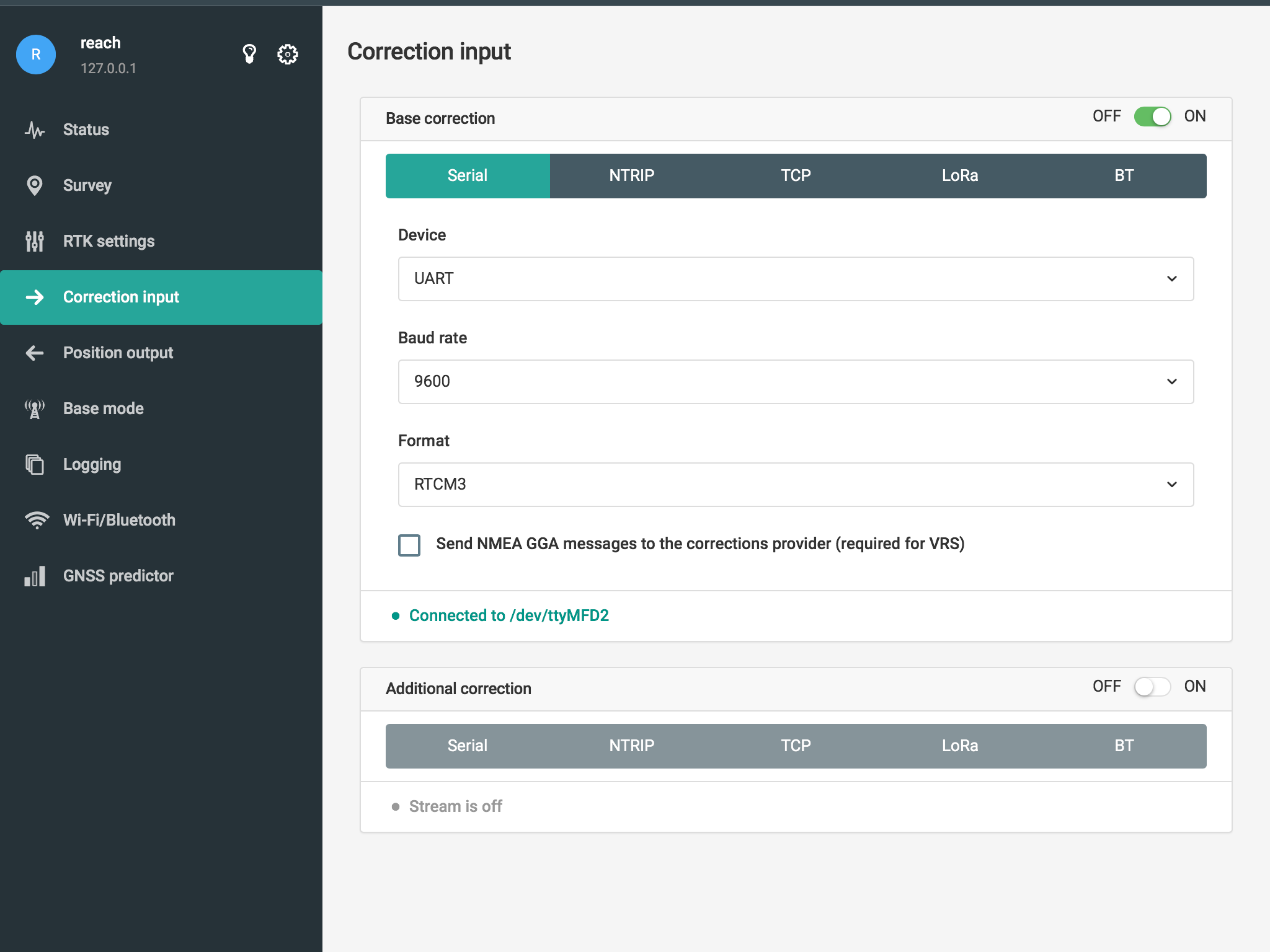
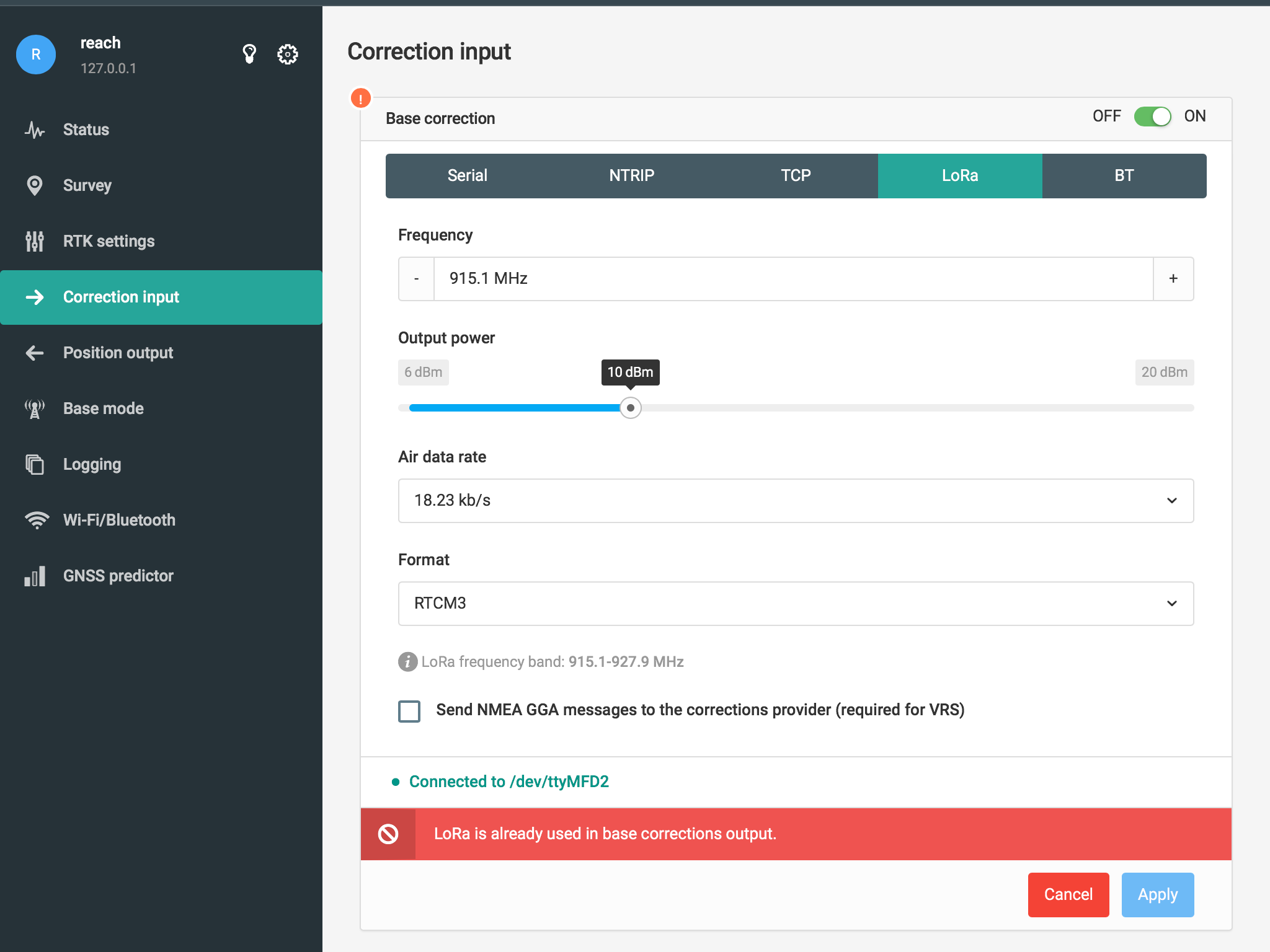
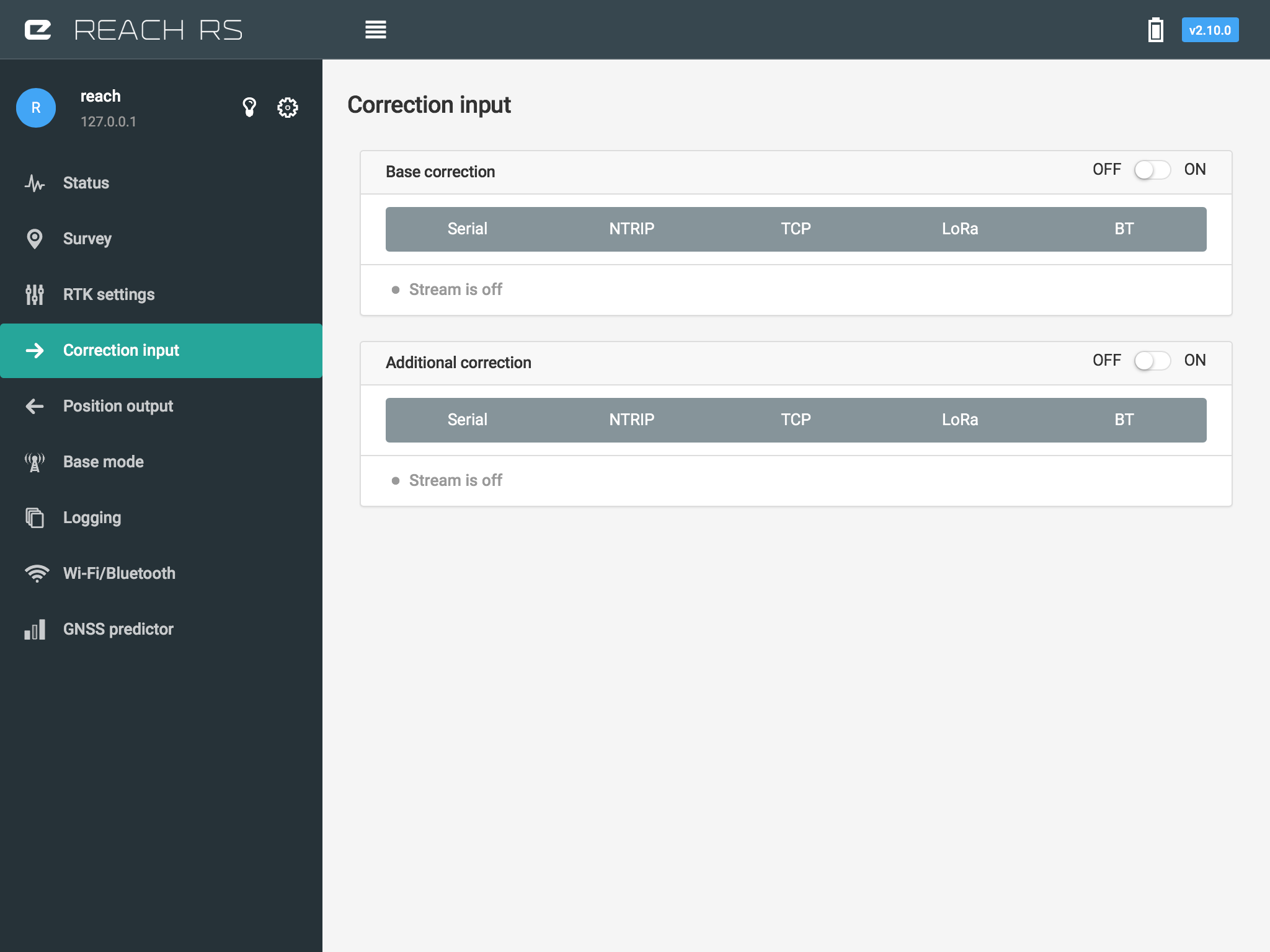
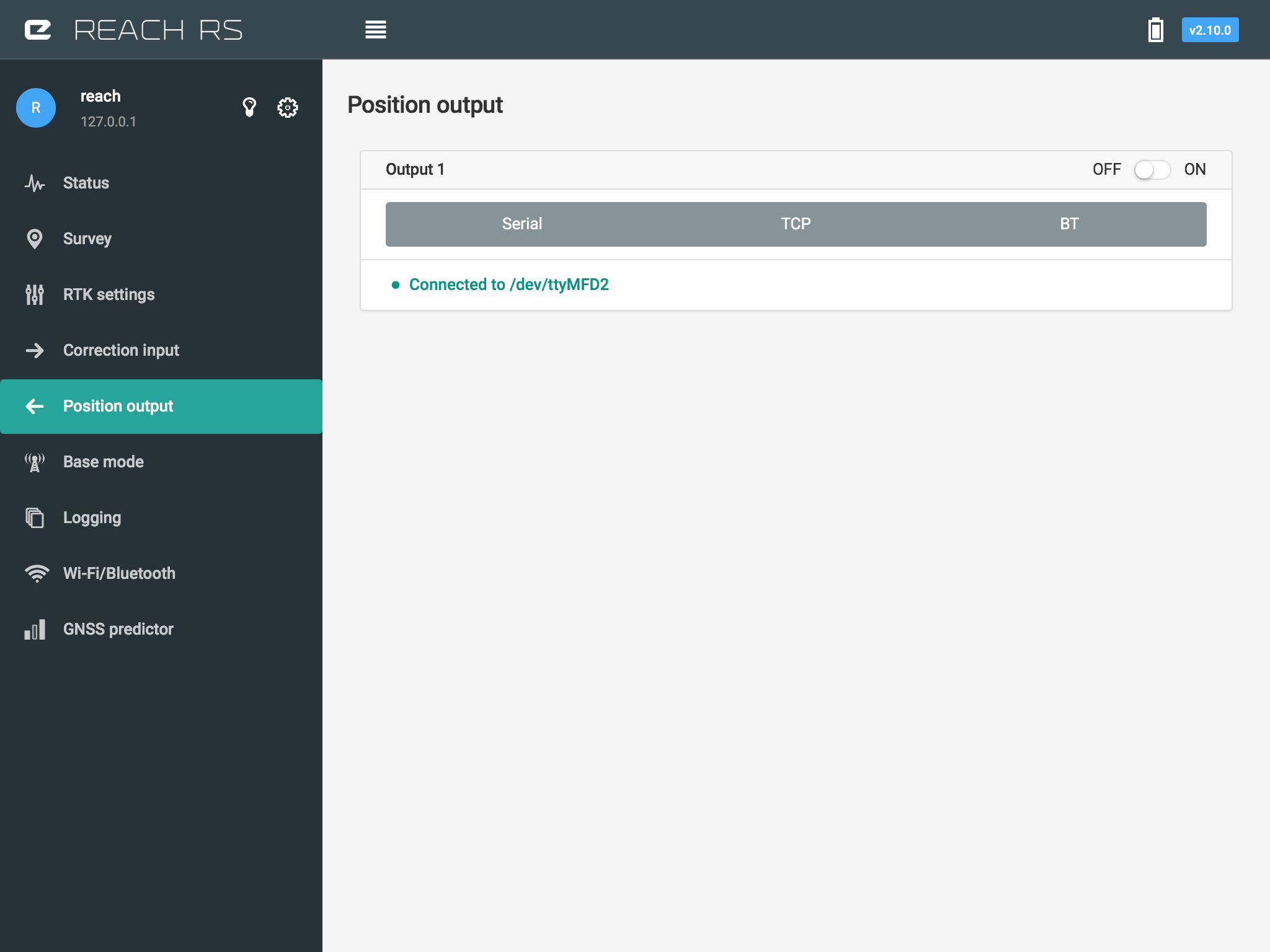
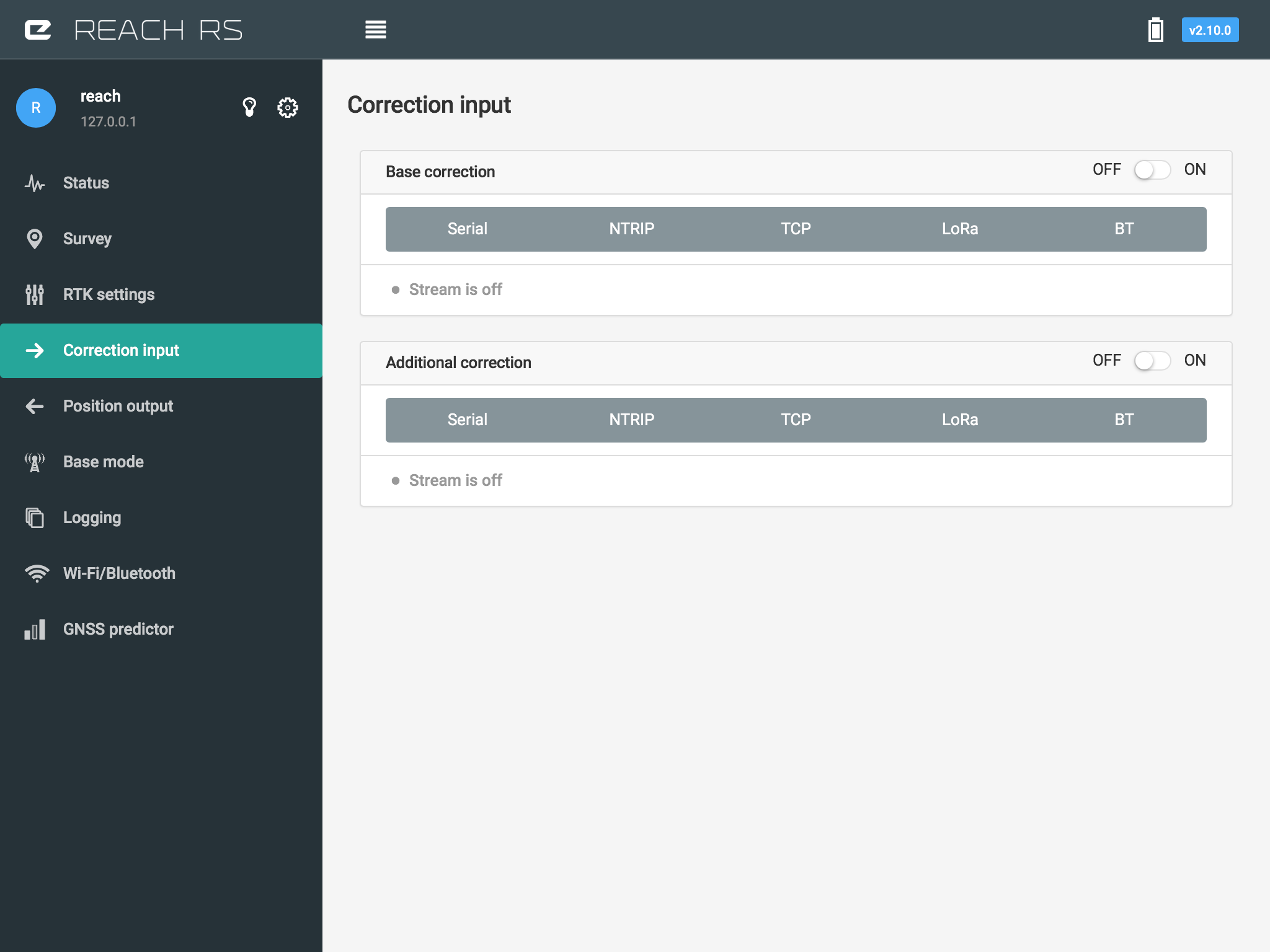
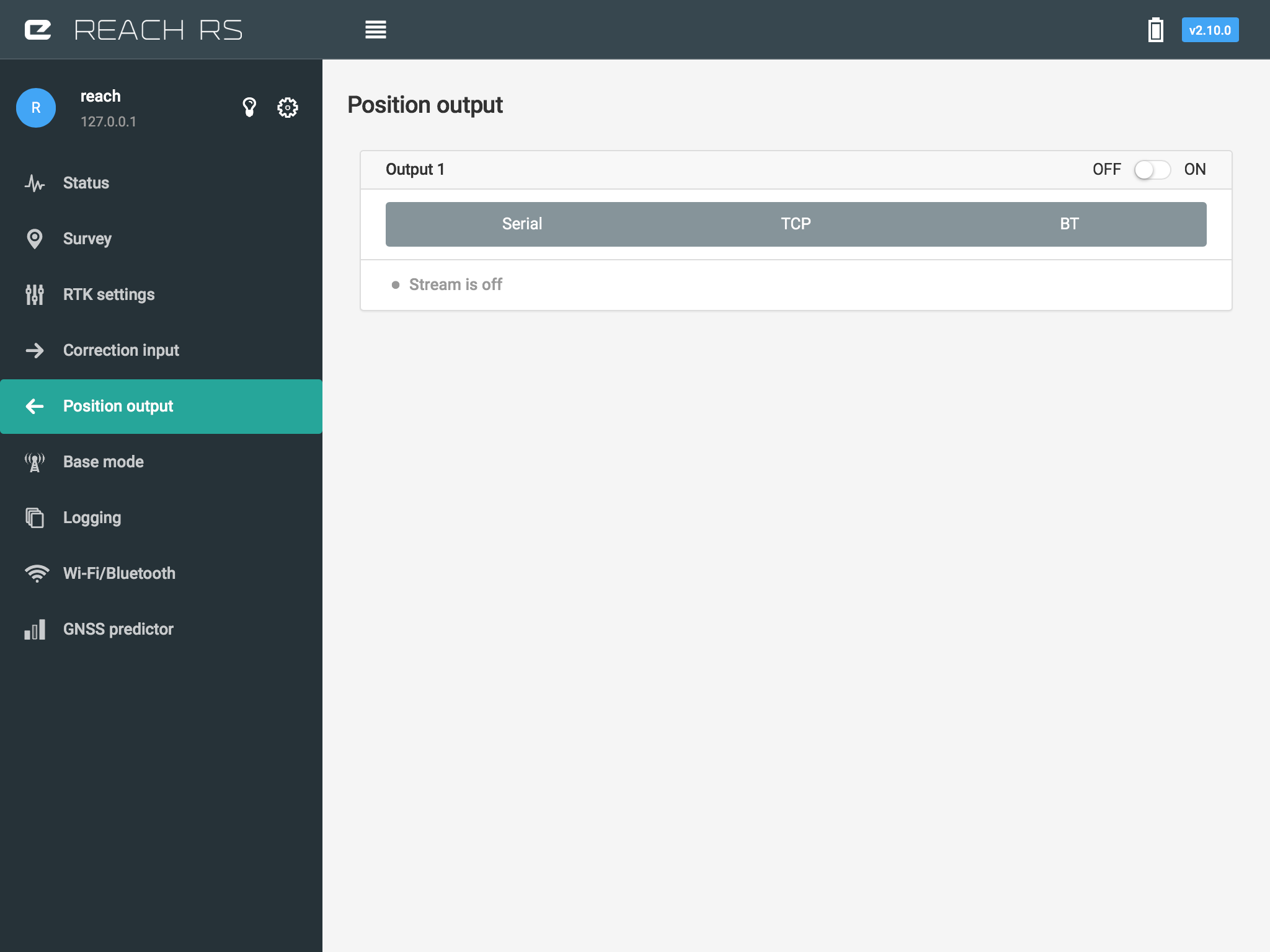
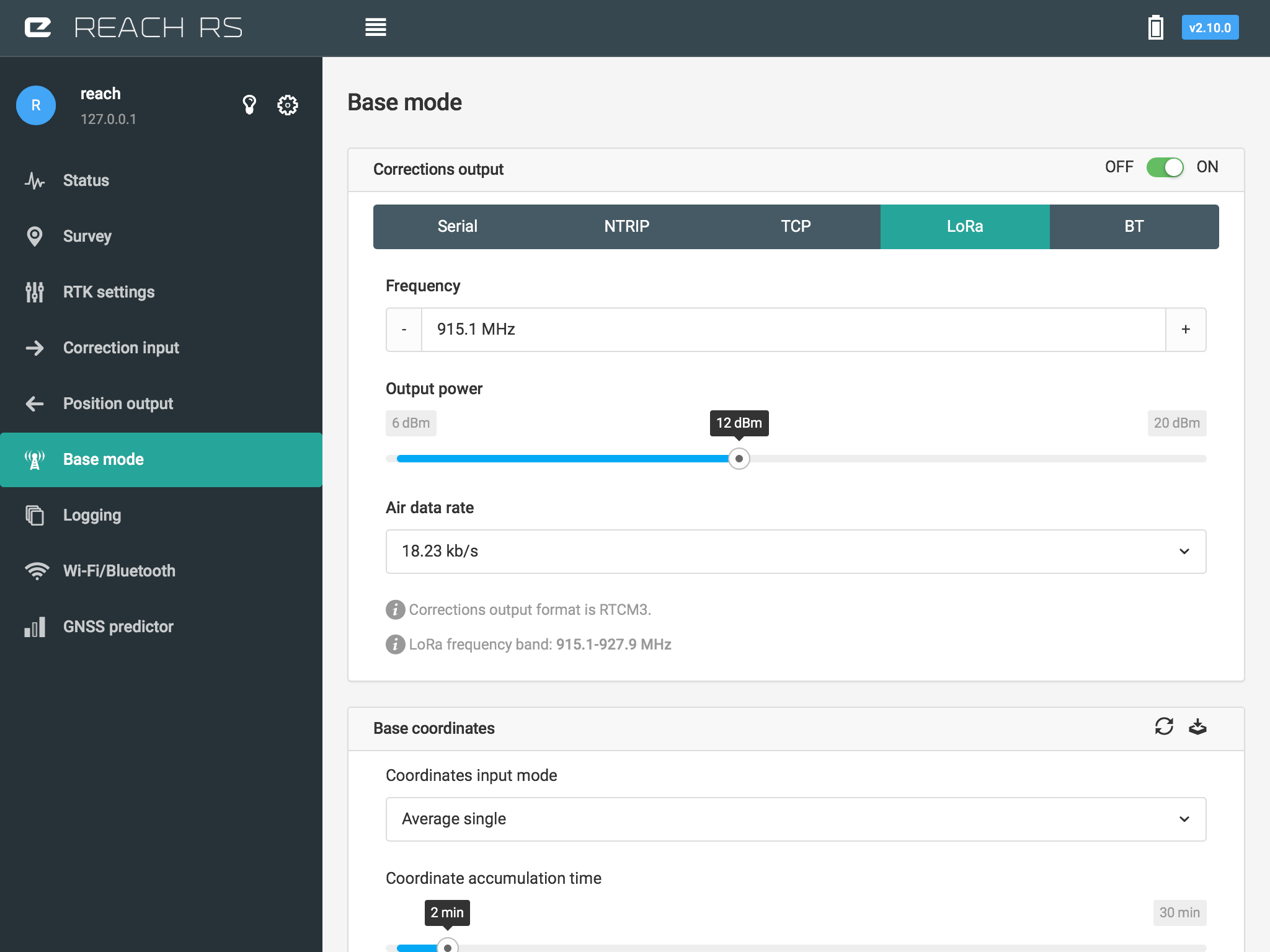
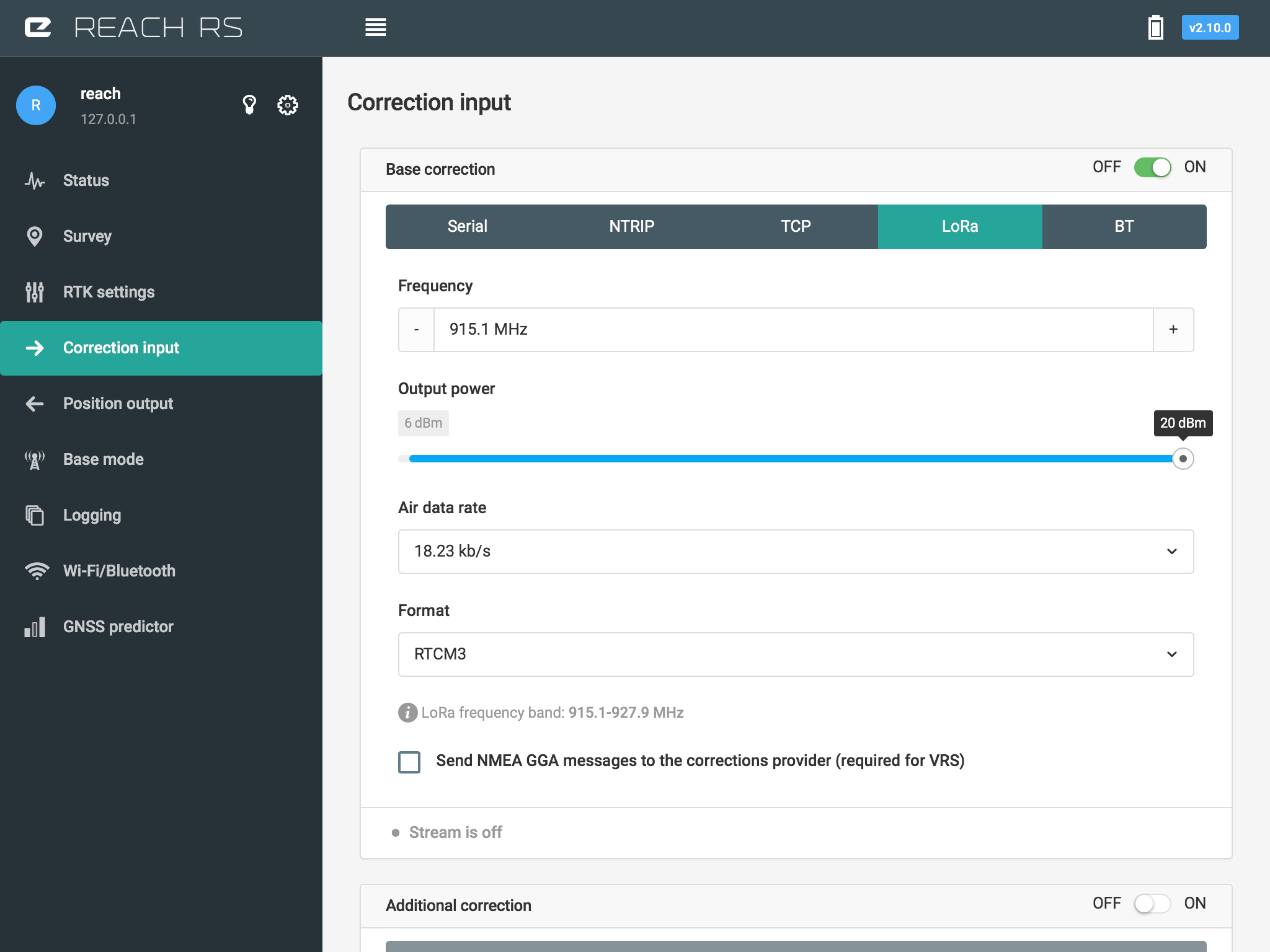
From your system report earlier, it seems to show multiple output solution or features enabled.
Could you disable all of them (Including serial out/input) and only have LoRa going out from base and only one LoRa correction input active on Rover. Screenshots are really nice or a system report
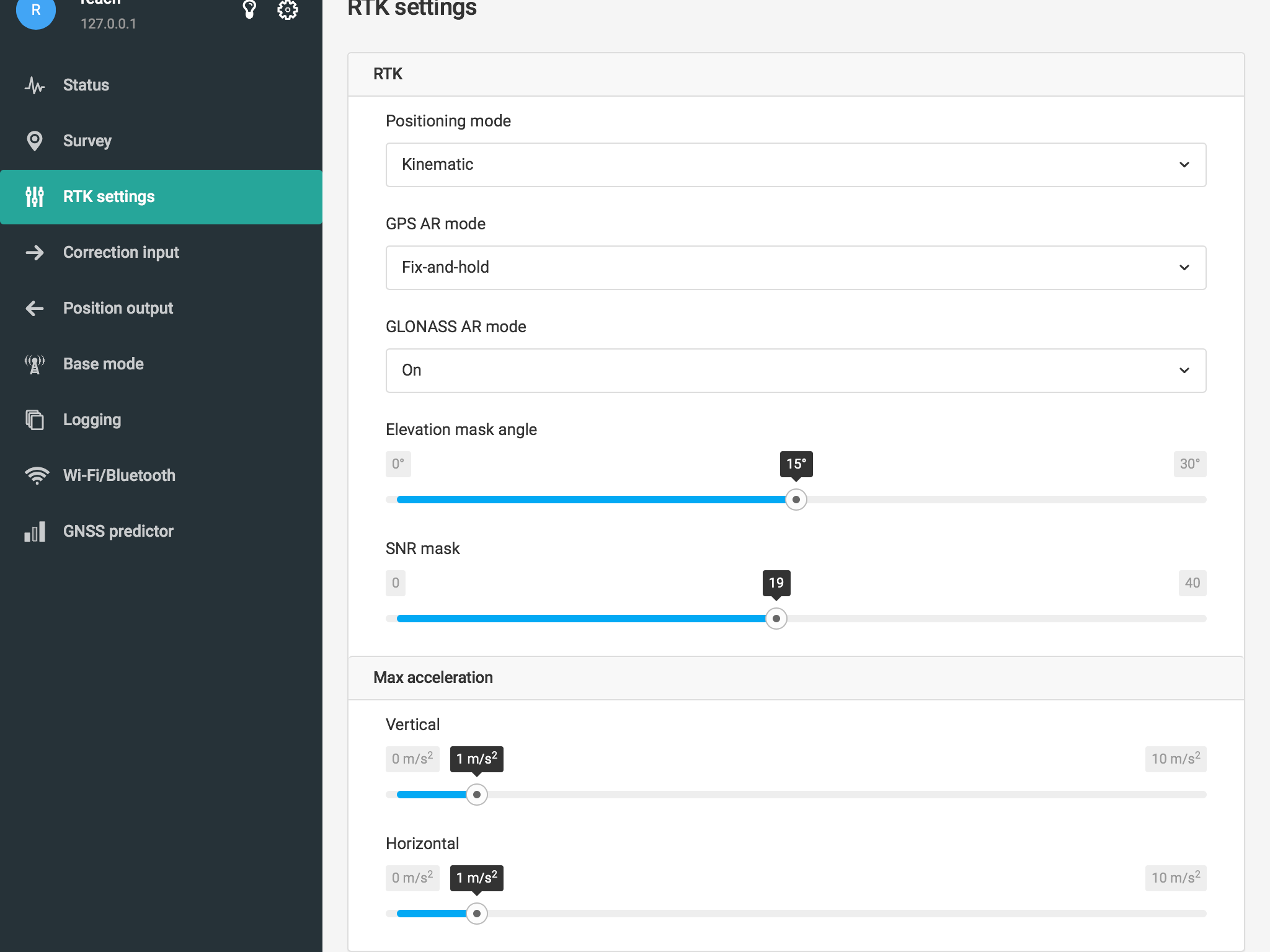
I have had the Base unit flashed and software reloaded. Still no success. Here are the screen shots from today.
Still not having any joy. Suggestions please?