



Is there still an english teobox video coming? I’m trying to use it, but when I add my events.pos file that the emlid version of rtklib saves, in teobox I get the error "timemark file wasn’t recognised’
Teobox can work with XYZ coordinates in meters.
Soon we will release new version, which can work with WGS84.
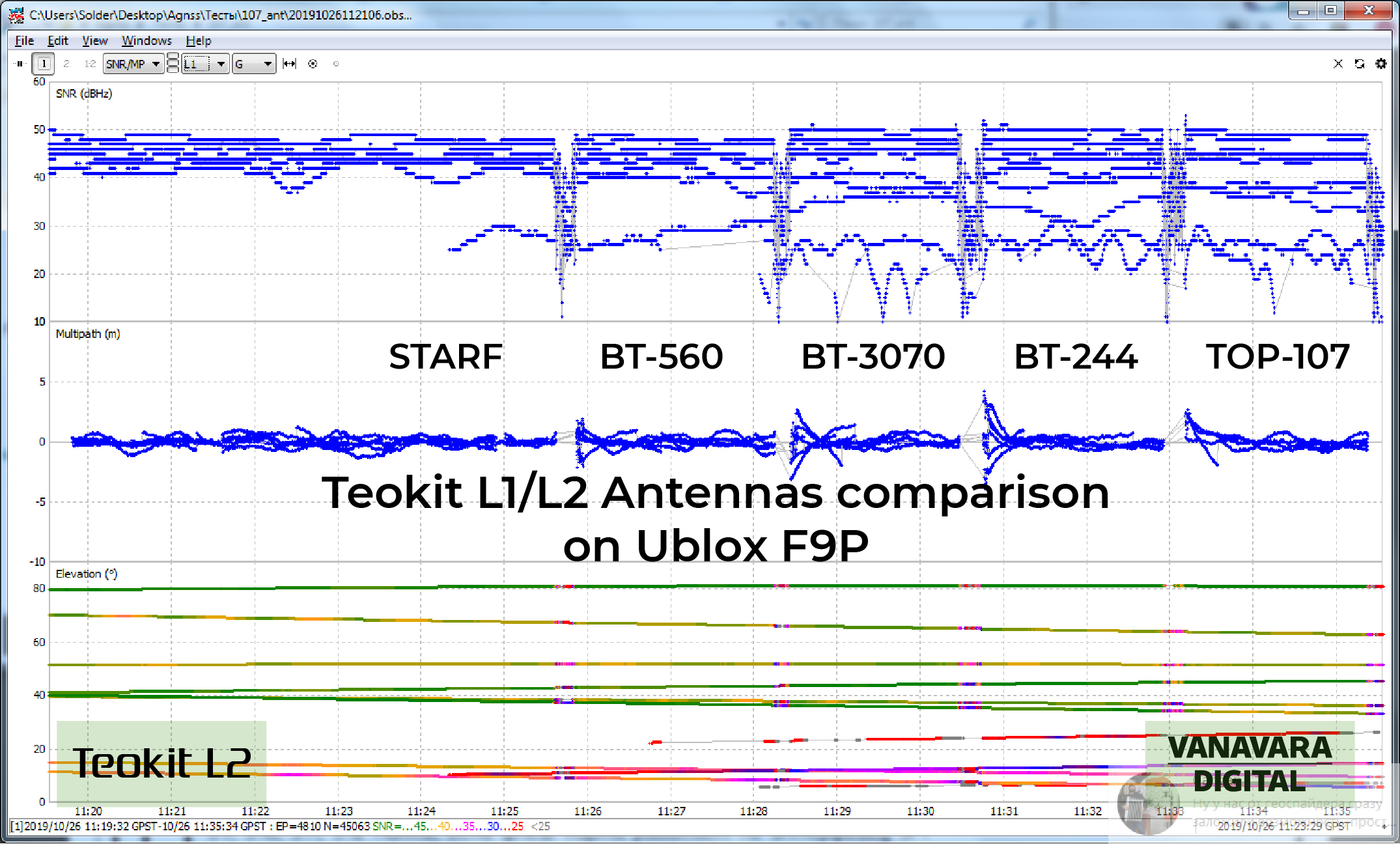
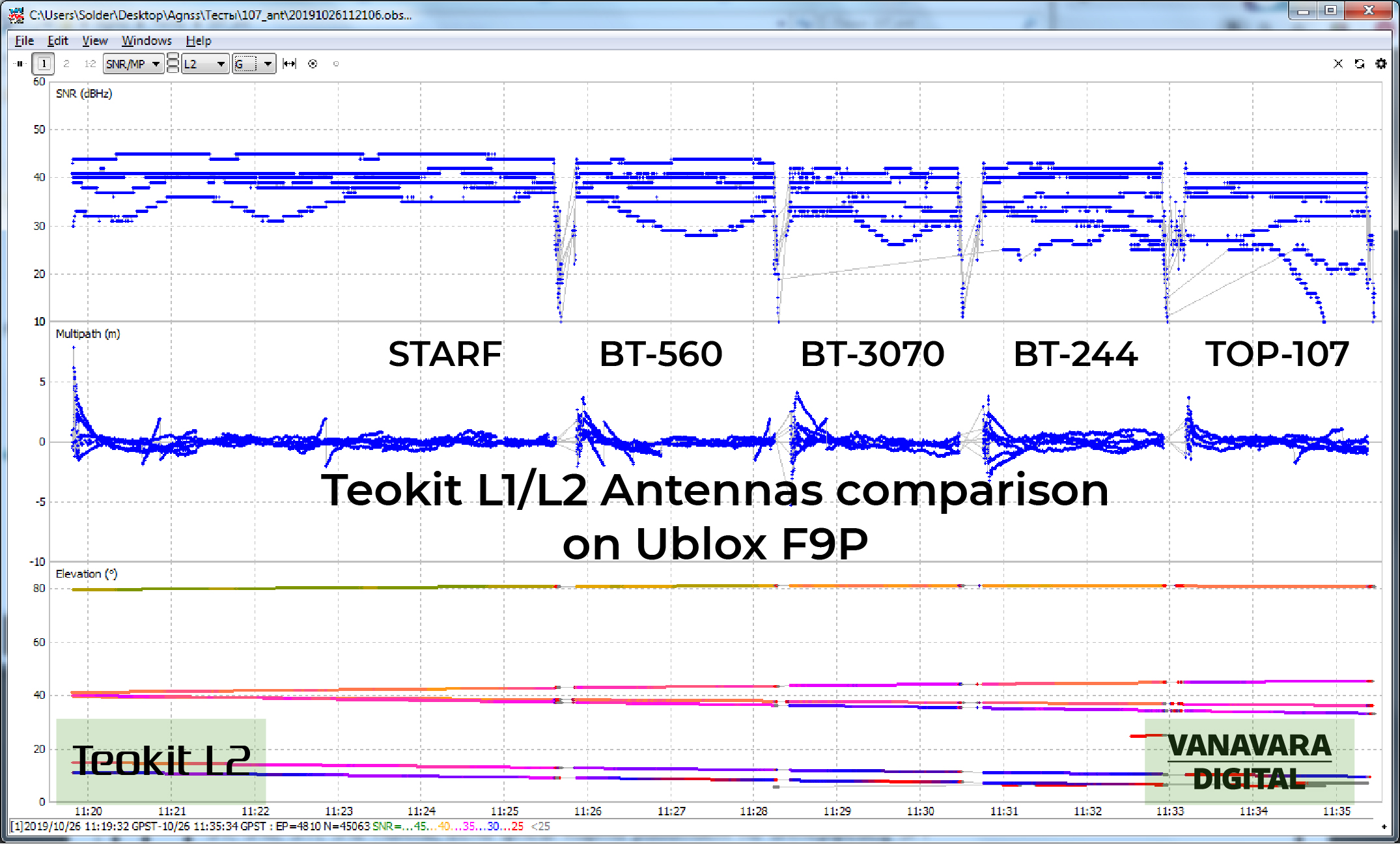
Hi, yesterday I made L1/L2 antennas tests with DJI Phantom 4 pro and ublox F9P installed on it.
There was snowy and I did not make a flight. Copter was set on the my car and did not fly.
Test was: GPS only, 5 Hz.
StaRF and BT-560 are more better to use with F9P module GNSS boards.
See screenshots:
3 Likes
We have updated Teokit installation manual.
Please see it: AGNSS Installation manual. Teokit
Most important part for update was:
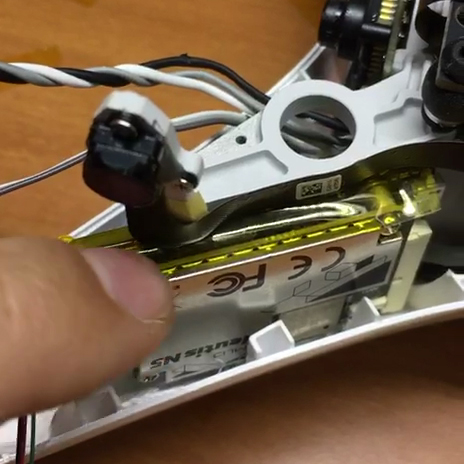
You need to cover GNSS board with any type of tape. Metal parts of the board should not touch the frame of the drone.
Please see photo:
I am in-line for the new M2,… I assume the whole hardware setup will work with the M2 the same as the M+ as developed now?
Hi.
Teokit for Reach M2 will hardware accept after 2 weeks.
We are making new Teoboard for L2 solution.
And you should use new L1/L2 antenna. We are testing now. Soon I will make post with models of acceptable antennas for L2.
1 Like
Hi everyone.
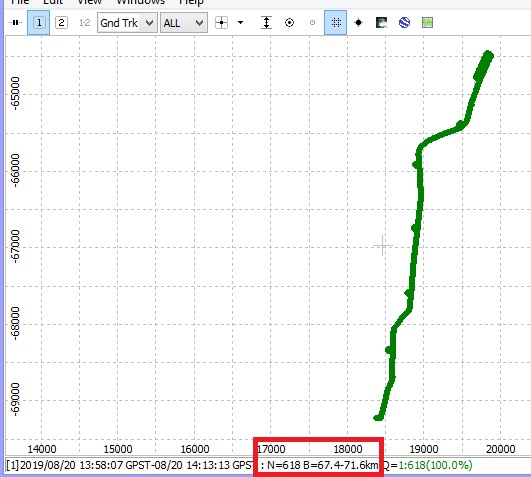
Sometimes flights take place in a very strong wind. SNR level is good, but we can observe phase disruptions (cycle slips). This is clearly seen in the picture below.
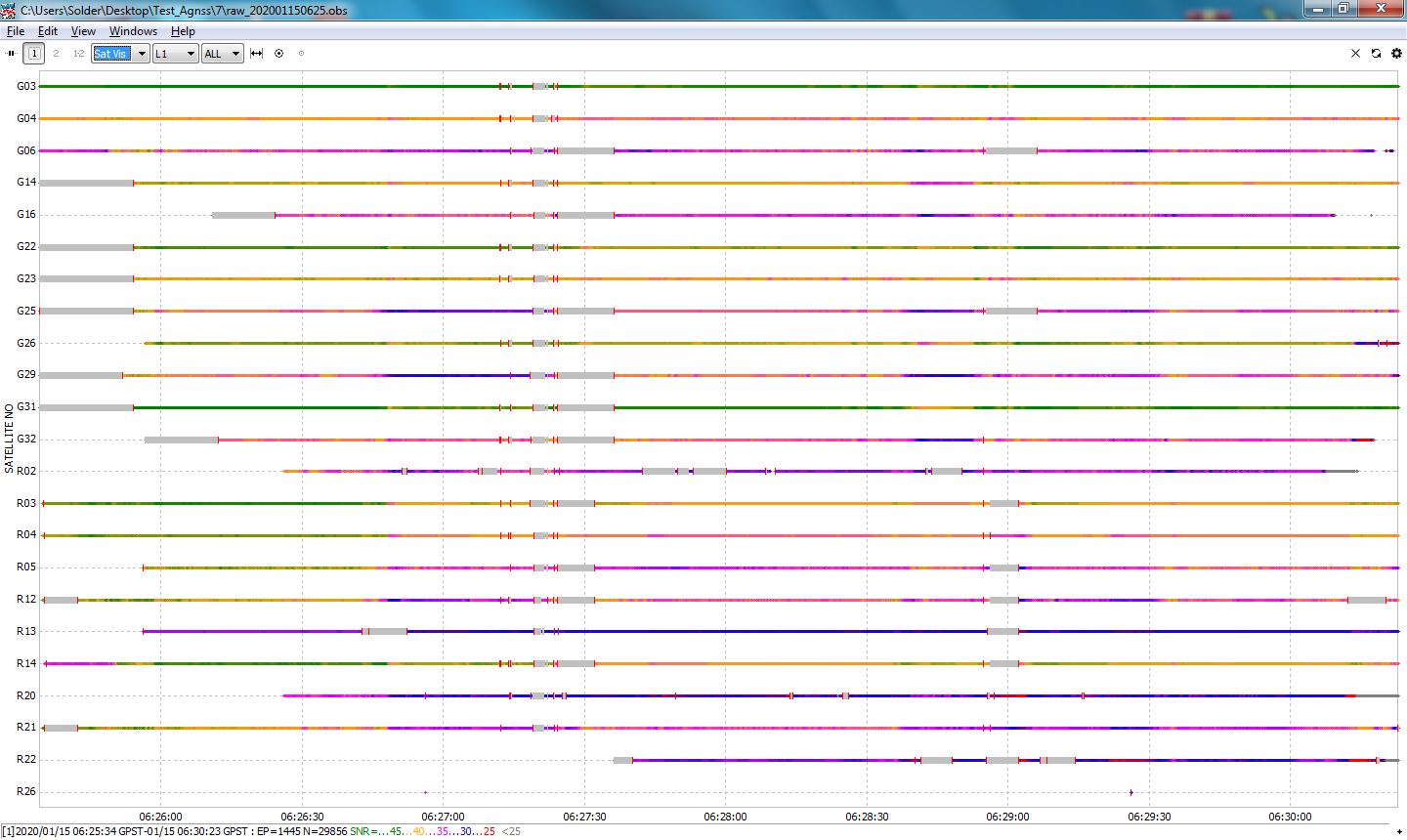
This is due to the penetration of air flow into the GNSS module. To avoid this, it is necessary to partially seal the module. Watch a short video about this.
During the procedure you should leave a small hole. See the photo below:
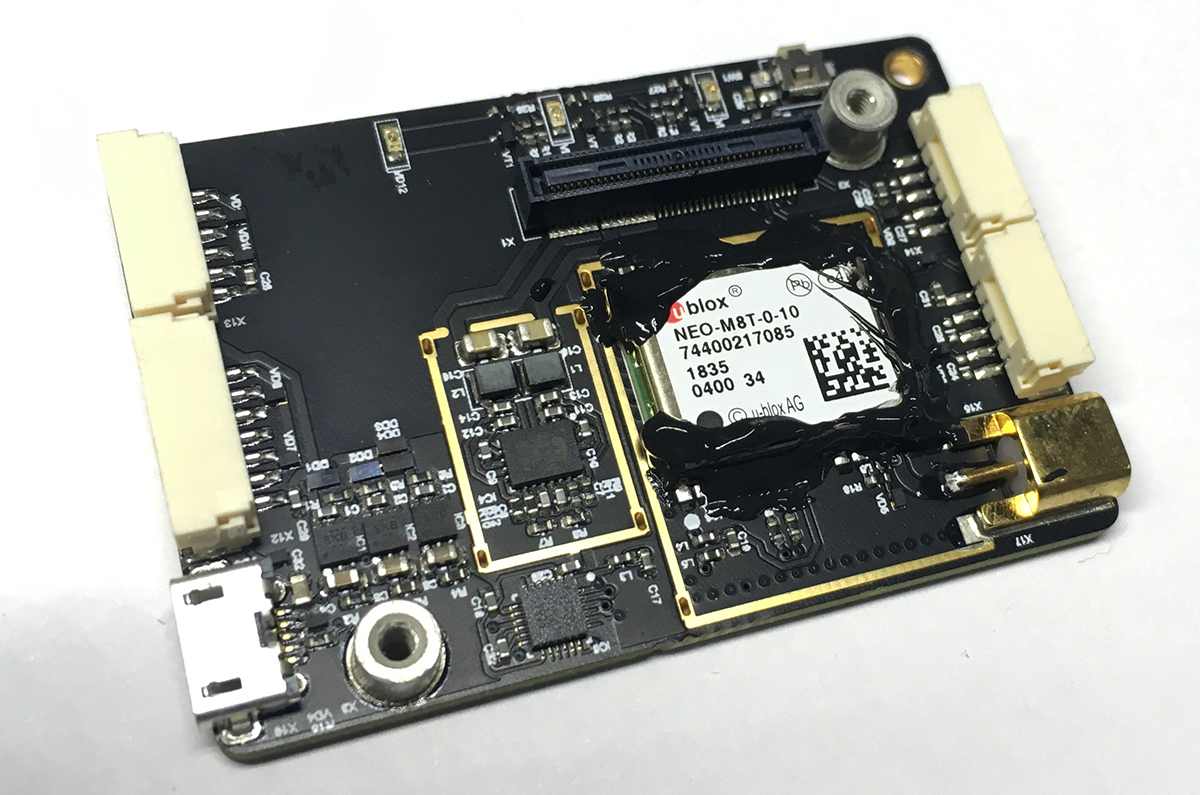
I use Kafuter 704B to seal.
Any questions? Please contact me here.
If you are flying in winds that strong then your probably shouldn’t be mapping.
Why not? Teobox app in post-processing will correct the difference between the antenna and the camera sensor during tilts.
We like working with reliable equipment.
By the way, Ublox F9P (Reach M2) module also needs to be sealed.
Not saying this isn’t a good idea, but neither is mapping in high winds. Also, the topic of this thread is Ashot not Teokit so Teobox was not implied… and no you cannot compensate for 20+mph winds. Even with a P4RTK we have done testing of the same survey in 20mph winds and a calm day and the windy day checkpoints were not as accurate. Not to mention that everything on the ground blows around which is not good for the point cloud.
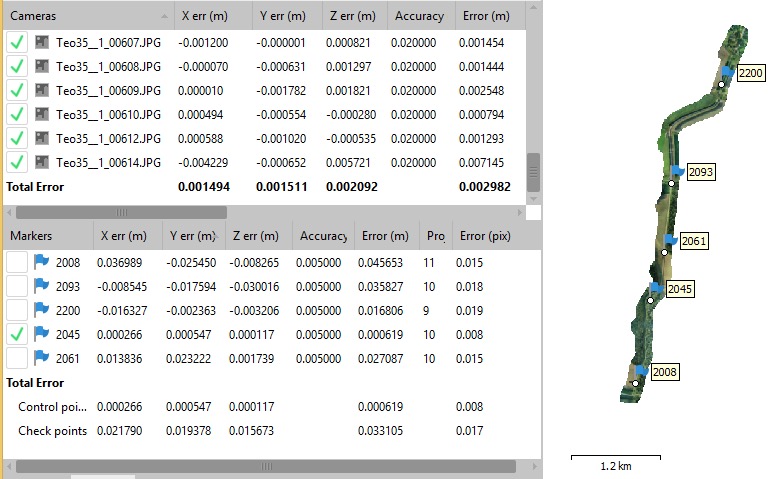
We tested Teodrone in 14 m/s wind. Accuracy is good ( 3-5 cm ), flight height is 120m.
Now I know you’re full of it. For one you are not going to get 3 to 5 cm accuracy at 360 feet altitude. For two you cannot run a Phantom 4 Pro at 30 mile per hour winds without causing oblique images because the gimbal will not compensate for that amount of tilt. You can throw all the reports you want but with those specs you’re doing some doctoring.
For an accurate result, you do not need to have a 90 degree camera tilt. You can test and tilt the camera 85 degrees. And you still get an accuracy of 3-5 cm, having on board the GNSS board, such as Reach with Teokit.
What is the problem with 120 m flight height and 3-5 cm accuracy?
Not true with inconsistent camera tilt, especially when it is roll and not pitch.
There Phantom 4 Pro camera is not good enough to have the level of detail required to achieve that accuracy at 393ft. Your GSD would be about 1.6in/px. Your relative accuracy at best is about 1.5x that. That said, I am talking about absolute accuracy and we have discussed this at length on this forum many times. If @VanavaraDigital is talking about relative accuracy and that doesn’t mean a whole lot in the world of mapping for real values. Trying staking out the ground to a surface generated by that configuration and then throw it in the bin.
I will say you have great product and I enjoy using the AShot, but I’m going to stop the discussion on accuracies right here because obviously we’re talking about two completely different things. RMSE’s according to an algorithm are not map accuracy. Relative or absolute. This can only be proven with boots on the ground as a QA/QC process. I’m sure it may be different where you are from, but in the United States work actually has to be performed by an RPLS to have the results certified. Advertising map accuracy is quickly becoming a no-no and already is in some states if you are not an RPLS or Engineer.
Would more check-points be needed?
What if the checkpoints are surveyed by an RPLS and the accuracy is within the tolerances defined by the ASPRS 2014 in an appropriate class?
1 Like
Hello.
In what results do you doubt? If you work according to the instructions for Teodrone, then the accuracy is 3-7cm. But there might be days when ionospheric disturbances affects on accuracy much stronger. Then the accuracy can drop to 10cm. I’m talking about a flight altitude on 170m. If you fly lower, the accuracy will be higher. And I’m talking about single-frequency Reach