I have tried modprobe, checked dmesg and lsmod. I tried to run the emlidtool force update and unloaded/loaded rcio_spi as suggested. There are no entries for rcio in either. If I run
sudo modprobe rcio_spi
It completes and then lsmod | grep rcio lists:
rcio_spi 16384 0
rcio_core 36864 1 rcio_spi
But it doesn’t matter:
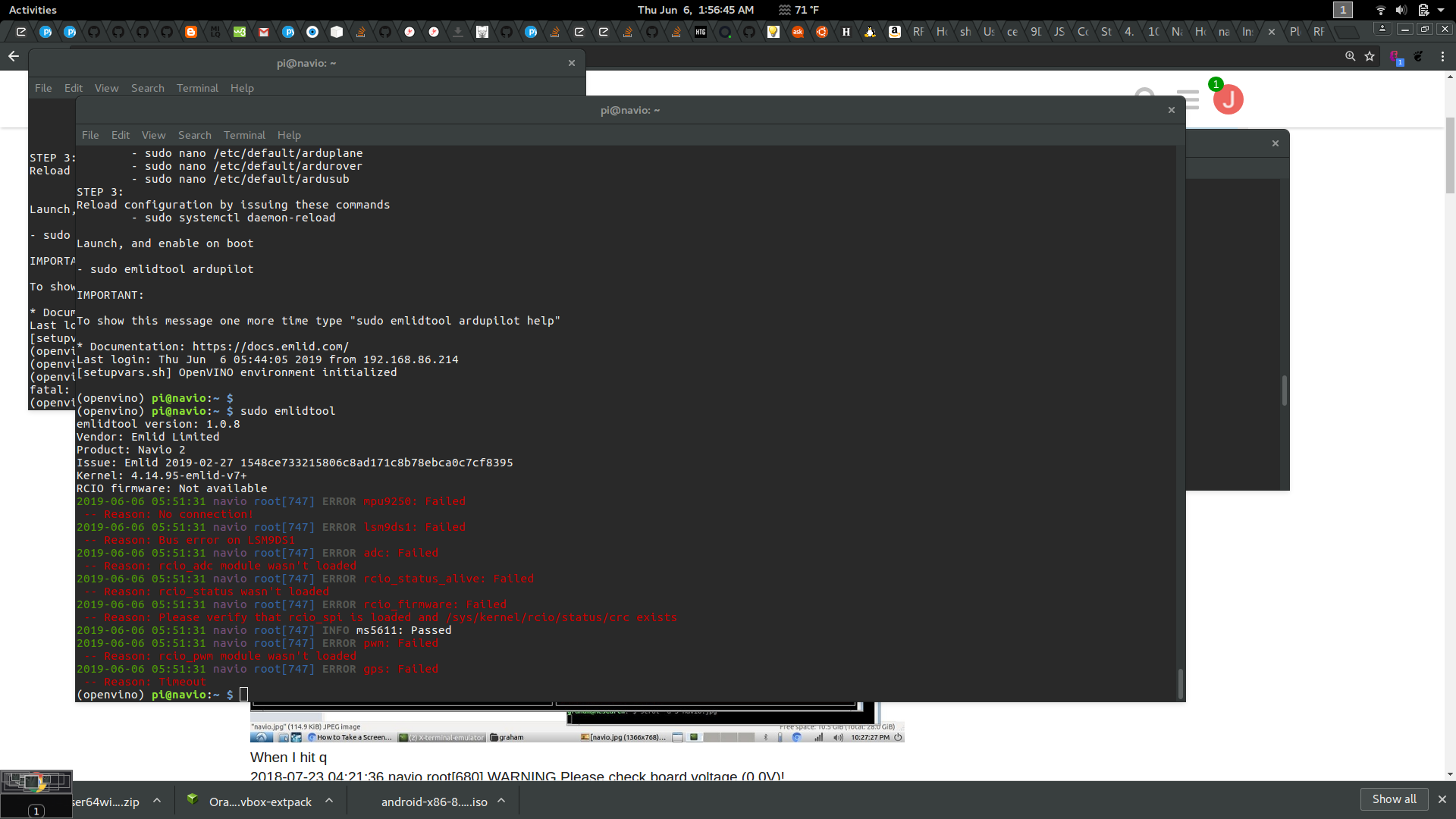
(openvino) pi@navio:~ $ sudo emlidtool rcio update
Please verify that rcio_spi is loaded and /sys/kernel/rcio/status/crc exists
/sys/kernel/rcio/status/crc does not load under any condition. Here are the results of the commands suggested in the other topic:
I think somehow this HW is now dead. Is there anything else I should try? I reflashed my image from the working copy from last night and repeated all of the steps above without any luck.
If you have a logic probe that might be useful to Emlid for immediate debugging to get the output of maybe the rcio pins? I’m not sure where they would want the probes. I would imagine on whatever pins are for connecting the navio to the raspi. I would see what Emlid has to say. When my board broke the raspi-wifi broke as well which makes me think of some part recieved to much current. #72 Making the invisible visible: Tools for debugging and re-engineering electronic designs - YouTube might be helpful, about six mins in is a part on logic analyzers.
OK - done. I disabled all three. Then rebooted then ran the command – complains about no crc:
(openvino) pi@navio:~ $ sudo emlidtool ardupilot
Traceback (most recent call last):
File “/usr/local/lib/python3.5/dist-packages/emlid/rcio/versionchecker.py”, line 43, in init
with open(self.crc_path, ‘r’) as f:
FileNotFoundError: [Errno 2] No such file or directory: ‘/sys/kernel/rcio/status/crc’
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File “/usr/local/bin/emlidtool”, line 11, in
sys.exit(main())
File “/usr/local/lib/python3.5/dist-packages/emlid/emlidtool.py”, line 355, in main
emlidtool.parse_args()
File “/usr/local/lib/python3.5/dist-packages/emlid/emlidtool.py”, line 258, in parse_args
getattr(self, args.command)()
File “/usr/local/lib/python3.5/dist-packages/emlid/emlidtool.py”, line 286, in ardupilot
self.func(ardupilot, args)
File “/usr/local/lib/python3.5/dist-packages/emlid/emlidtool.py”, line 333, in func
args.func(args)
File “/usr/local/lib/python3.5/dist-packages/emlid/util/util.py”, line 37, in wrapped
return fn(*args, **kwargs)
File “/usr/local/lib/python3.5/dist-packages/emlid/emlidtool.py”, line 49, in do_ardupilot
if FirmwareVersionChecker().update_needed():
File “/usr/local/lib/python3.5/dist-packages/emlid/rcio/versionchecker.py”, line 29, in wrapped
fn(*args, **kwargs)
File “/usr/local/lib/python3.5/dist-packages/emlid/rcio/versionchecker.py”, line 47, in init
’ {crc_path} exists’.format(crc_path=self.crc_path))
emlid.rcio.versionchecker.CrcNotFoundError: Please verify that rcio_spi is loaded and /sys/kernel/rcio/status/crc exists
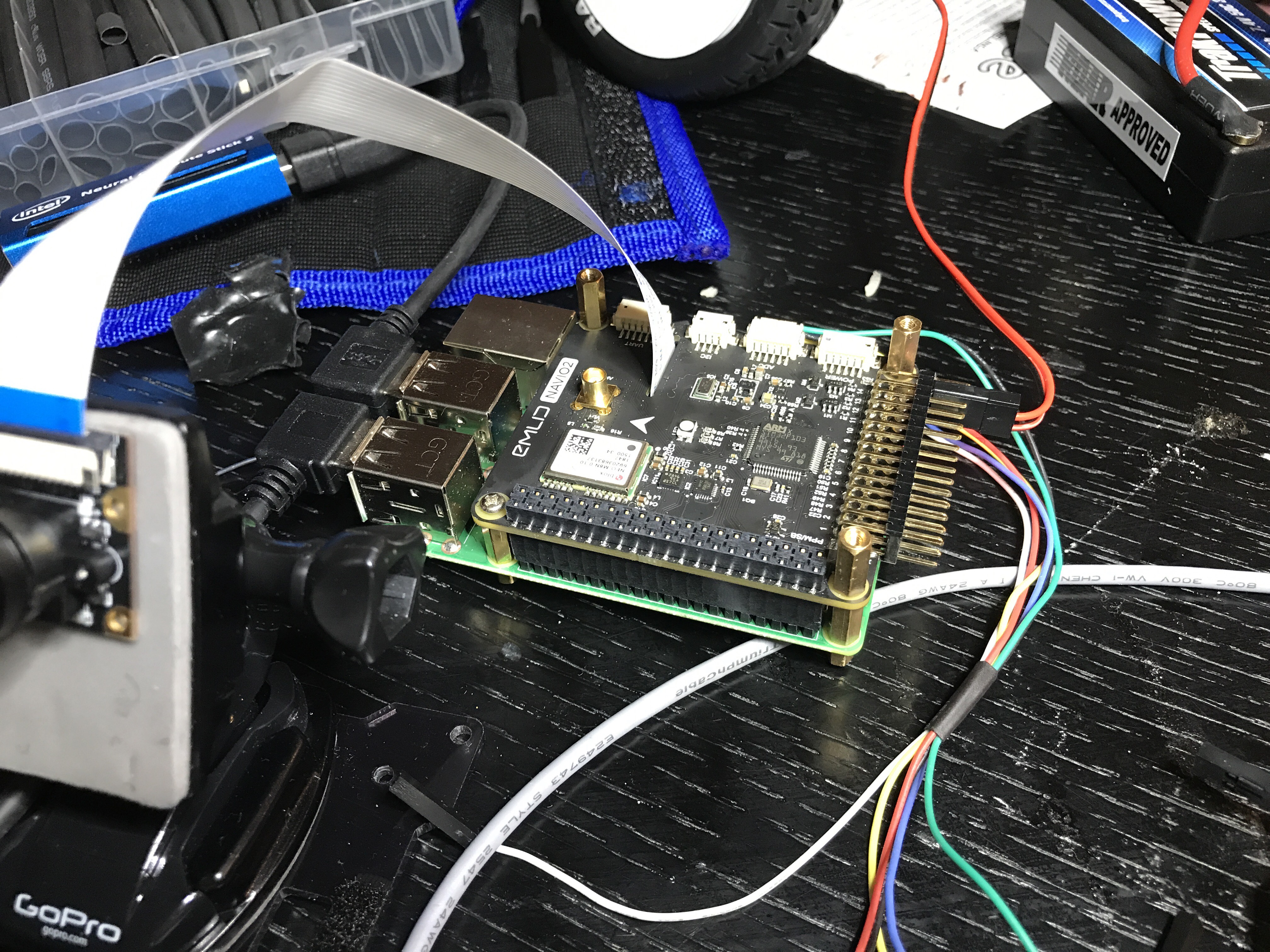
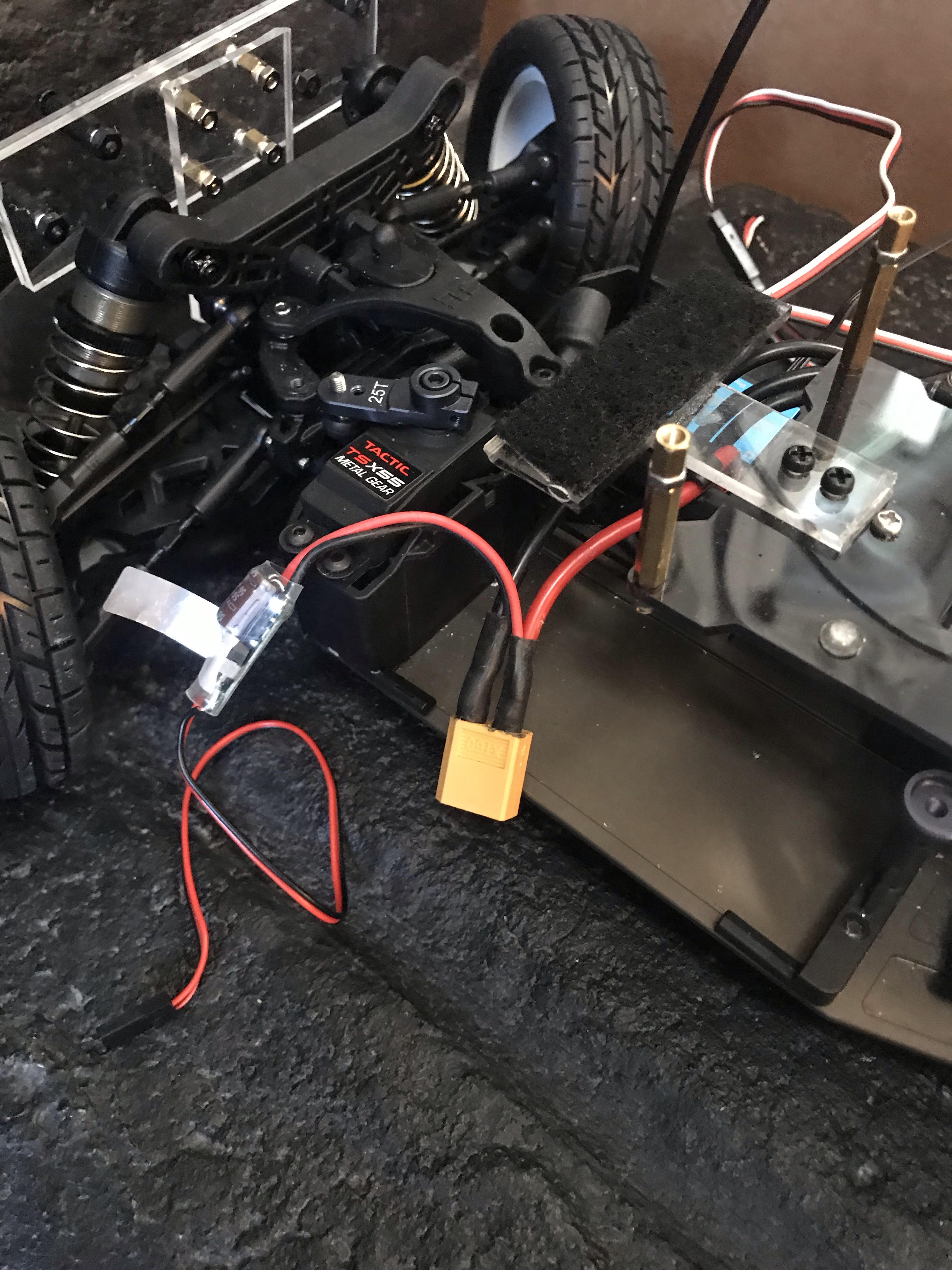
Here is the RPi, navio, NCC2 and Camera - with 5v RPI power source (used in the tests/cmds above). There is a closeup of the RPi / navio2 header. Two of the sonar. One of the car that shows the 5v 3A BEC soldered to the ESC power. I clipped the red wire between the ESC’s 6V BEC out and servo rail (not shown)… so only one power source through the BEC shown to the servo rail. One photo of the battery / harness as well. That’s everything. @tatiana.andreeva
Sorry-- the ADC harness is attached. I run ADC3 and 4 to the sonar TX channel. The sonar trigger channel is what is attached to Servo rail to the pins setup as GPIO as described above so that they can be triggered independently.
@tatiana.andreeva thanks for your help so far. I have disconnected all hardware and attached pictures so you can see the header and RPi pins.
Nothing appears to be damaged. I unplugged the picamera and USB extensions, reseated the navio2 (pic of that), booted and attempted to run ‘sudo emlidtool ardupilot’ but its still the crc issue:
(openvino) pi@navio:~ $ sudo emlidtool ardupilot
Traceback (most recent call last):
File “/usr/local/lib/python3.5/dist-packages/emlid/rcio/versionchecker.py”, line 43, in init
with open(self.crc_path, ‘r’) as f:
FileNotFoundError: [Errno 2] No such file or directory: ‘/sys/kernel/rcio/status/crc’
I am able to access the navio2 IMU via python. But the rcio, servo rail, and ability to access/control the LED are still not there (from the navio2 python examples).
I’m going to need to continue this project soon - do I need to purchase another navio2 from your website? I had bought mine via Amazon.
@tatiana.andreeva L2 inductor voltage is 0.0mV. I don’t really feel anything getting hot anywhere. I’ll reflash from the original emlid image in a moment and run emlidtool test.