



I am developing this software on my Mac, so I don’t have any RTKlib here installed. I try to maintain, that software is multiplatformal. What exactly do you need?
That is a good idea. I don’t need anything, I just wanted to discuss. But now I understand that it is not possible.
It is possible, but it will be available only on Windows. I will see, what I can do.
Thank you, but if you don’t use it you don’t need to implement it. I have my own Windows script (I also like to learn programming) but I work with Python - less beautiful but I think it is simpler to use for a lot of different things.
But I really like your programm, reminds me on R Shiny - very beautiful and powerful too.
| antenna height | corrected_lat | corrected_long | corrected_alt | collection end | collection start | elevation | index | lateral rms | latitude | longitude | name | sample count | solution status |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2.0865 | 19.04327344 | -96.06052965 | 18.16670896 | 2019-02-07 16:00:38 UTC | 2019-02-07 15:59:58 UTC | 30.6927885 | 1 | 0.003 | 19.0432972 | -96.0605237 | Point 1 | 200 | FIX |
Help me understand the difference with corrected_alt (18m) and elevation (30m). Should it be antenna height + elevation for corrected_alt? Dataset collected with 2 Reach RS base and rover.
Other than that. Awesome software !
It depends, whether you made corrections for antenna in RTKlib or not. I still don’t know why you have such a difference. corrected_alt is just averaged values from processed POS file.
In my sample data I have a difference too - between values, measured in SINGLE mode and processed values. The difference is ~4 meters, which is ok. I see, that your points in CSV file are already FIX. How did you got FIX in the field? You were using 2 Reach units? Or you were connected to the NTRIP caster?
It also depends on how you process your data. Please, describe how you measure and what are you using.
Used 2 reach rs+ units base over known point, manually imputed the coordinates in to the base. RTK with the rover. Processed with Emlid’s RTKPOST, in the “options” - “positions” corrected the antenna height for the base (1.735) and rover (2.0865).
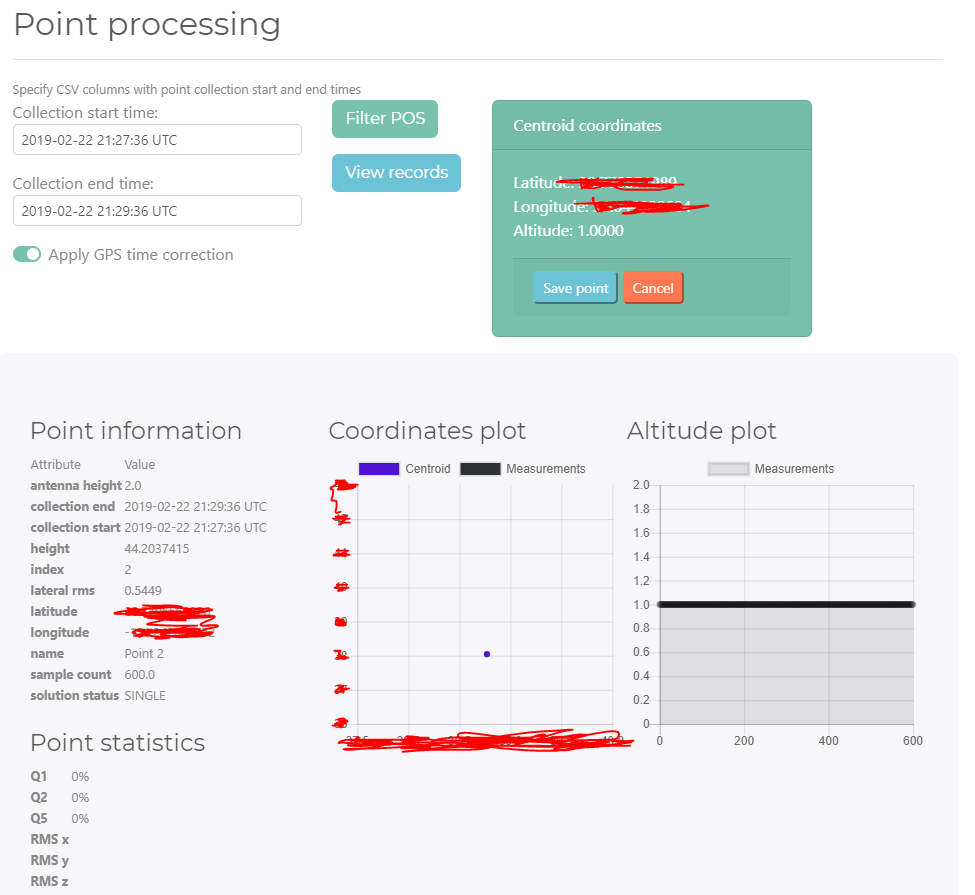
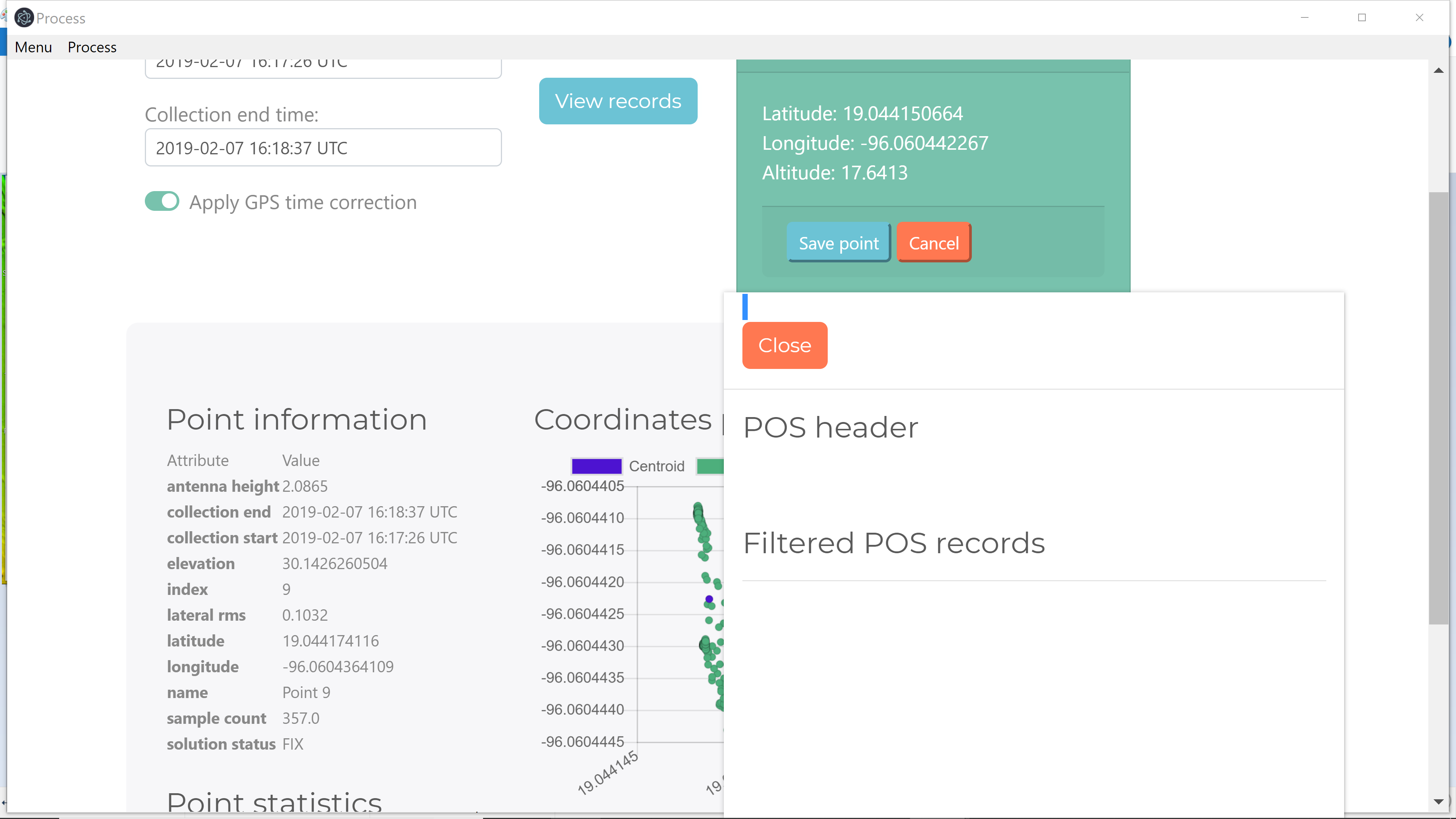
Greetings, I am getting some strange behavior on v2 when PPK. Point recorded for two minutes with a total of 600 observations in that time window. In program the plots do not populate and altitude goes to 1. I see my positions in the filtered records POS, however.
Is there a specific format Electron is looking for in .pos file out of RTKLib?
I am by far not an expert on this, but you have (PPK) post processed and the results should only be one point after you have post processed. There is nothing to average for in XY&Z. Please anyone correct me if I am wrong. But it is kind of strange your alt - 44.2037515. With my test results I also get incorrect altitude output results. Please anyone correct me if I am wrong.
Electron is using the default output of RTKlib. Is it possible to get the pos file and csv file? You can send it to me privately.
No, it is not like that. If you process raw ublox file with RTKlib, you will get pos file with all the measurements. Like Hunter has mentioned, he has 600 measurements. If you didn’t split the raw file, you should get 600 corrected measurements in the final pos.
1 Like
Sent in message, thanks.
Ok, I found where the problem is. I will post the fix today.
1 Like
Here is fixed version. Now it should work just fine.
Posprocessor v.0.2.1
2 Likes
Thanks! Pulled and ran same dataset. I now have coordinates plotted but as @susimpresiones40 brought up I too have no POS records shown now. Think you are still working on but statistics (RMS) be nice to see. One other thing is when I hit the filter pos more than once, it plots the altitude each time I filter so that it now has multiple plots in one graph
I know you have put an incredible amount of work into this and it shows, thanks for efforts. Still can be improvements. I’ll echo some earlier thoughts but after processing again on this version we can really polish this thing up:
-
Ability to further trim time interval within each point (based on postion, signal quality etc… like in RTKPost)
-
Export shapefile as well as CSV with attributes of your choosing like check boxes as I don’t necessarily need everything (at minimum XYZ with RMS)

I correct rover/base altitude in RTKPost so no need to apply correction in your software, right?
Great stuff, thank you!
1 Like
One other thing would be great to see your survey points on an actual map like Leaflet with Openstreet Map/Google basemaps.
Thanks for all the comments. I am trying to make this software better, so your comments are really useful!
The bug with View records is only after Batch processing. I will see, what I can do about it.
2 Likes
Just used your software again on two jobs, saved me a lot of time. Now to integrate with QGIS…
I like to run various settings through RTKPost on same dataset and see the difference in QGIS after each run. It makes it pretty fast to run through the different settings and plot each run within same project map
1 Like
How do you use QGIS for this? Are we talking kinematic or static measurements?