I’m sharing some UBX files for you guys to process and share your results, if possible share your configurations to see if i can reproduce your results.
Note: In southern Brazil it’s noted that the GLONASS constellation is mixing up the results and also reducing the used satellites in the post-process, try also testing without the constellation to see if changes anything for you.
Base file is too large, so im sharing a link in Google Drive to download
Together is the PPP .pos, .kml, .sum and .pdf files.
The PDF file is in portuguese so i will share the UTM and Lat/Long DMS coordinates, as well the antenna height for the base, i don’t have the height for the rovers though:
Lat: -26° 38’ 25.1532"
UTM N: 7052373.188m
SDN (95%): 0.000m
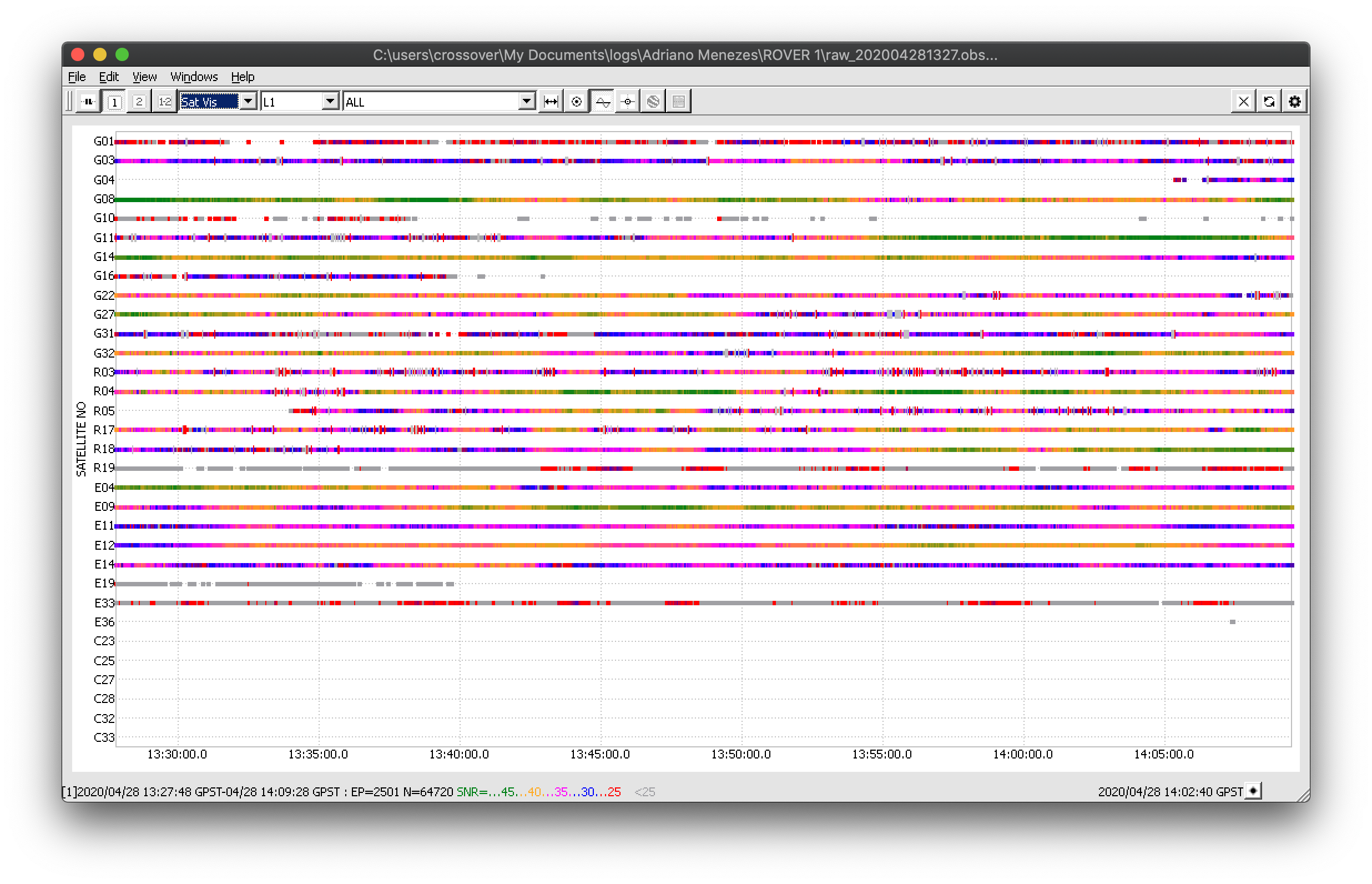
Could you please describe the conditions where the survey was accomplished? Is there any chance you have photos of the environment and hardware setup? Rover’s data is quite noisy, especially the 1st raw log.
Hello Tatiana, i don’t have the Rover setup, since this is a clients survey, we always recommend to use the configurations from the docs. What i have with me is a .kml of the points. Rovers are under treetops at the base of a hill, not too fa for from the treelines.
More obs time is needed if the results are to be useful. Especially GLO is really challenged by the environment
Rover2:
for the short baseline, getting to 99% FIX percentage took quite a few different processings, and demanded Fix-and-Hold. Under better conditions, Continous mode would work flawlessly here, given more trustworthy results.
Wel that’s a bit hard because Rover 1 has 42 min of observation and Rover 2 has 30 min. I think those are good obs time even if the points are below treetops at the side of a hill.
And GLO as i said is been known to be having bad readings here at southern Brazil for reasons unknown at the moment.
Can you share your results and configs so i can compare with my own?
I’ve never understood why people won’t stay on station for any length of time, especially in high-multi path areas. Then they don’t know why they can’t get a fixed solution. I’ve used GPS/GNSS systems since the early days when forested areas were forbidden in the obsevation realm. It’s just now within the last few years that you can proceed with caution in high-multi path areas with today’s equipment with long enough obsevations for PP. I for one am getting too old to walk miles through mountainous forested terrain to re-observe a point because I’m too impatient. One hour MINIMUM in high-multi path areas and you better have another baseline vector to compare it with. Enjoy the data collection, the forest and creatures around you in the knowledge you have an accurate observation.
Looking at the data, it is not enough. Not that you get a higher percentage of fixing, but the length in it self smoothens out deviations.
For this particular processing, I had to disable the SNR mask, and use fix-and-hold. Both things can lead to false fixes when the environment is challenging like your scenario here.
I don’t think you have a problem with GLO, it is the forest and the surroundings that are making GLO bad. Your base see the GLO sats just fine.
Hi @tec.adriano.menezes, I process the data with topcon tools v8.2.3 and magnet tools v4.2. I hope in helps in your comparisons. I’m yet to process it with Trimble business center. I’ll upload it’s result when I do that.
Note:
No antenna height was input for the Rover point as you only provided that of the reference.
Processed the data using only GPS and glonass satellites process reports.zip (18.2 KB)
I am certain that the observation time is more than enough considering both baselines are in and around 1km. I record 20mins at 1hz observations under cocoa trees for baselines over 2km and still get a fixed solution after PP. I only record GPS and glonass constellations. Addition of any other constellation gives me horrible results. I only add other constellations if I’m doing rtk work, it helps me maintain my fix status.
@wizprod, I really think it’s a solid fix from both tools. Well, unless topcon and Trimble are conniving in some way.
This is the processing summery from Trimble business center v4.10. They’re almost exact. I used all 3 constellations (GPS, glonass and galileo) in this one though. TBC Project file data.zip (35.7 KB)
But there it is still just:
“Solution type: Fixed”, as boolean as it can be.
Even in RTKpost where I can use the L7 band of GAL, I can’t get a 100% Fixed solution with the Rover1 file. 90%-ish at most, and that’s taking some very compromising loopholes in use (No SNR mask, fix-and-hold under questionable conditions).
Of course, it could be that they are just that much better, though I seriously doubt that. There is still some physics in this that can’t be bent.
I get your point. It’s quite interesting though. But I mostly check the results of my rtk collected points against logged points after PP in those tools (that’s provided the area is within lora range of base). The points are always almost exact with the variations between rtk collected points in the survey tool and postprocessed logged points under 5cm. So with that said, I don’t think they give me false fixes with my workflow. Otherwise, a whole nation’s Lands Commission wouldn’t be using it as their primary PP tools (Topcon tools, Topcon magnet tools and TBC) to process raw data we send in for verification of points observed from we surveyors in my country.
But on the other hand, those points are measured under optimal conditions, and if optimal conditions can be met, they roll out the total station instead
Mjaaaeeeh, you still wouldn’t have optimal SNR conditions, so you would still have considerably larger Stdev, even with many hours of obs-time, compared to the same obs-time under optimal SNR.




 I get your point. It’s quite interesting though. But I mostly check the results of my rtk collected points against logged points after PP in those tools (that’s provided the area is within lora range of base). The points are always almost exact with the variations between rtk collected points in the survey tool and postprocessed logged points under 5cm. So with that said, I don’t think they give me false fixes with my workflow. Otherwise, a whole nation’s Lands Commission wouldn’t be using it as their primary PP tools (Topcon tools, Topcon magnet tools and TBC) to process raw data we send in for verification of points observed from we surveyors in my country.
I get your point. It’s quite interesting though. But I mostly check the results of my rtk collected points against logged points after PP in those tools (that’s provided the area is within lora range of base). The points are always almost exact with the variations between rtk collected points in the survey tool and postprocessed logged points under 5cm. So with that said, I don’t think they give me false fixes with my workflow. Otherwise, a whole nation’s Lands Commission wouldn’t be using it as their primary PP tools (Topcon tools, Topcon magnet tools and TBC) to process raw data we send in for verification of points observed from we surveyors in my country.