



Definitely better than the stock positioning I would think unless the image capture timing is off which could actually make it worse. It will be fun to see what you get.
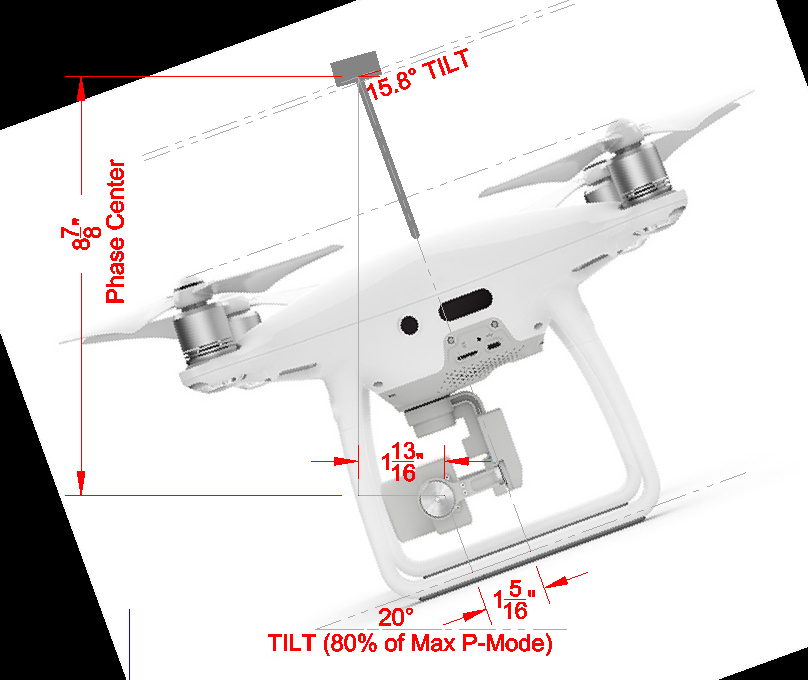
The top ground plane is angled to counter the tilt in forward flight. This will never be perfect but it is accounted for in Brian’s setup. My lipo went bad and my new batteries will be in tomorrow. Will get back to testing then 
1 Like
I ordered a 5 pack of the batteries here for $30
1 Like
Christian, you can see something went wrong here. Since my Lipo bats wont be in until tomorrow, going to set it out today and overserve for a while with a USB power supply to see what it looks like over a several hour period.
edit: reuploaded image with correct flight time markers.
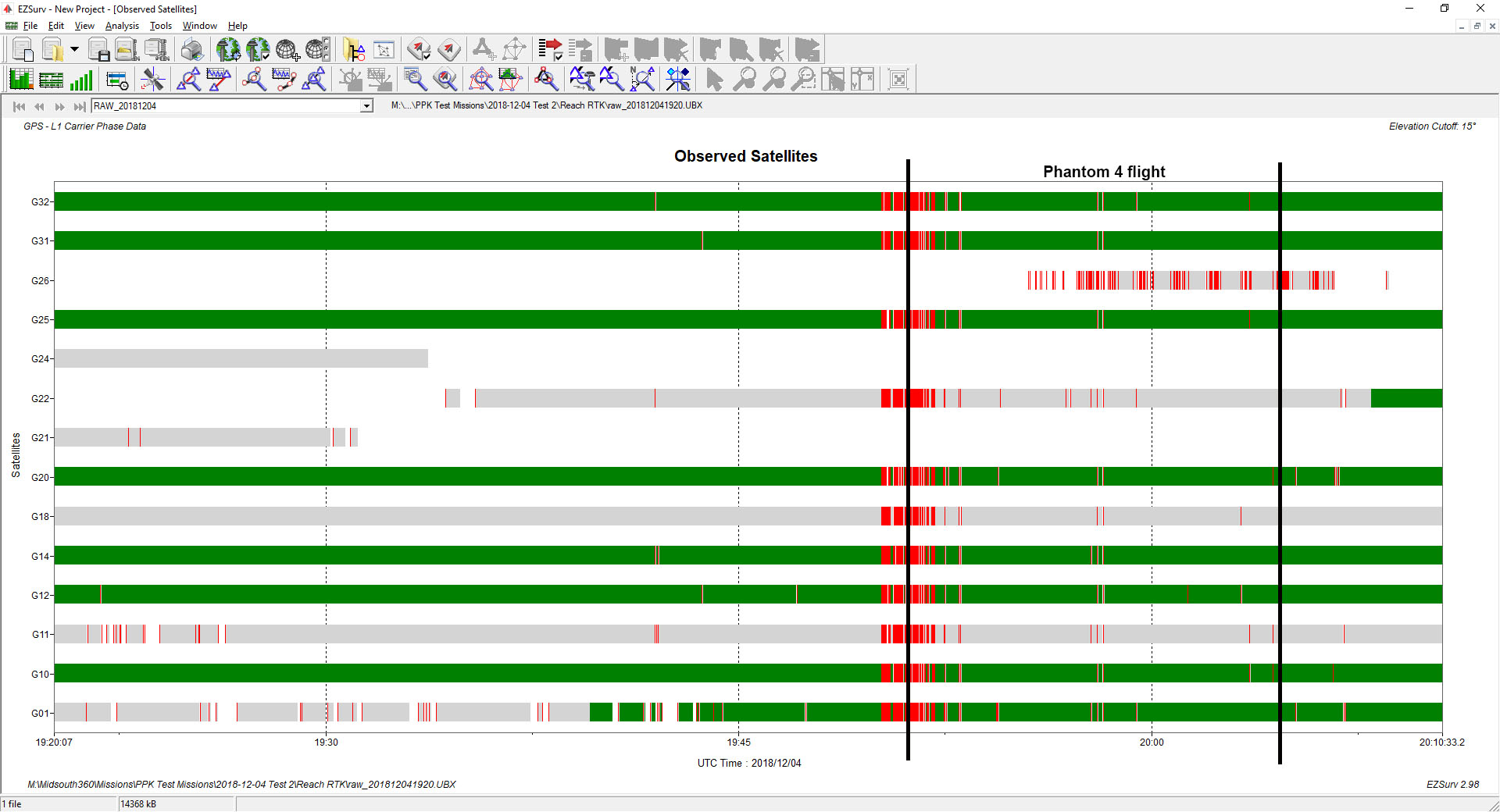
I am going to put a cover over the antenna and see how that does as well.
The problem the angled ground plane is that you get multipath from below the horizon or even from a steeper angle from nearby ground, when/if the drone is at an aggressive attitude.
Sounds like I need to figure out the mean angle of attack and design an alternative mount. I already have a great prospect in our GPS parts, but it’s too big so I think I will start with a shorter mast and slightly larger base plate. I actually thought about this earlier this morning and I am assuming the Tallysman is so high is because of coordination with the blades? Like the DJI P4RTK bringing it down 6-inches would go a long way to mitigating this error.
It needs the distance because of interference from the Phantom. Bring it down lower, and you’ll see an increase of cycle slips. Also remember to isolate (Faraday style) the reach module.
Also, if you increase the ground plane, and bring it down lower, you’ll cover the GNNS reception of Phantom, and you’ll have bigger problems than just cycle slips 
2 Likes
@timmyd
Hmm, usually when I replace batteries or move the Phantom around, I have have tendency to lean in over it. Even the Phantoms build-in GNSS will then report loss of sats, and go into attimode for the duration.
Can that be your problem ?
As I see it, the Phantom needs to be left “alone” from start of log-collection over flight and all the way to end of flight/log collection end.
Once I receive my new Lipo batteries today and also when I get the M+, I can do some extensive comparison test to look for repeated issues and narrow down any problems (if any) that exist. So I wont’ post up any info until I actually have good info to post. I am certain that I will get this running very smooth and reliable 
1 Like
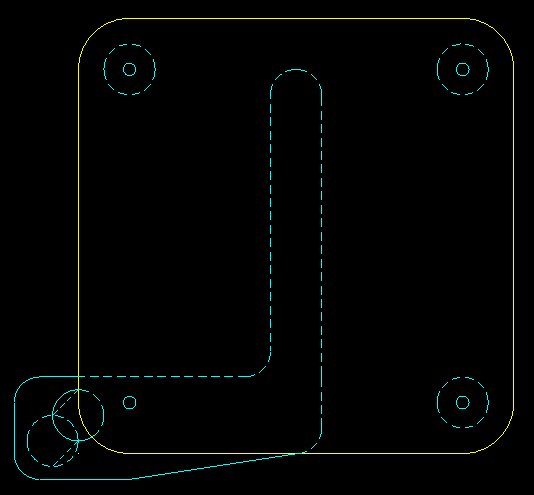
Makes sense. Putting the data in CAD now so I can share a dimensioned plan of my setup.

1 Like
Ok, just did a test by setting up my base and P4P in my house so I know it will be garbage data, but hopefully I can use it to learn how to use RTKLIB. I’m going to search the forums, but do I need to run RTKPOST first or just RTKLIB? Here it goes…
Running RTKCONV and received E=43. I’m assuming it’s an error?
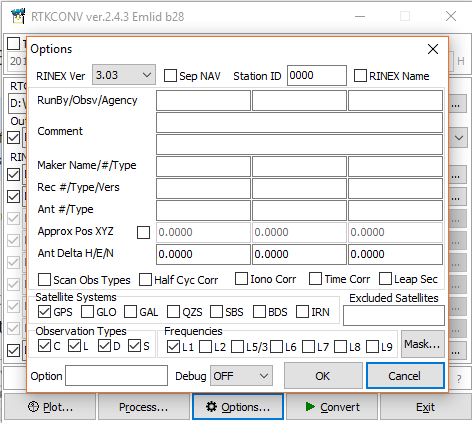
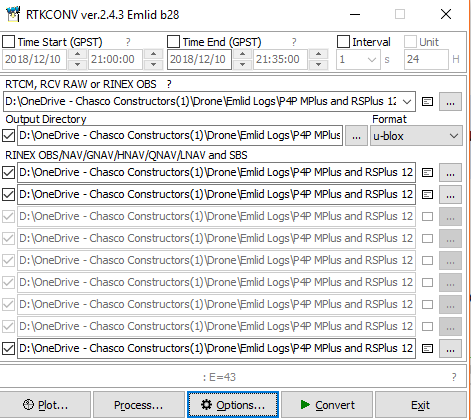
E= Is usually indicating the number of empherasis.
Do you get the one and nav file out?
1 Like
I do not. No files have been created. Didn’t maybe that because I was indoors and have garbage data? I hope to test out on a real site today.
@Brian_Christal, Did you make the black components for the ground plane? Would you consider a design change? I can create a CAD model if that would help. I think I just need to buy us a 3D printer…
@Brian_Christal, Or - I will pay you to make me one? I can model it and am sure I can provide a compatible file type.
Hi Michael,
Yes I can make the modified ground plane base, but it’s futile. There is still a significant timing error with the LED blink, lever-arm error when the phantom takes a picture on corners, as well as camera calibration. The geotag still will not be precisely positioned at the camera sensor. However, the system can provide a precise model as is, but you must mark a GCP by setting the Phantom on a target and taking a picture. A single GCP will get you less than 5 cm error.
Brian
Ok gotcha, but I don’t know that is going to matter in my case because I use GCPs. I have to so that I can tie to real ground datum. If I can cut my GCPs by 75% then it is a huge cost savings. Somewhere in the range of $30k/year. It’s all in testing. I just need to get the p-p geotags back in the pictures. I understand that this was the problem with the Matrice 210RTK when it came out. I just don’t need anything that big.
Hi Michael,
Here is a link to a sample data set. I can go over adding the geotags to the photos.