I need some help here with processing of my data with the PPK workflow. Today and last week I`ve tested our new equipment that we bought from Emlid. Its the new Reach M2 (rover) and the Reach RS2.
Ive made two setups which can both be used with our PhaseOne IXM 100mp camera for use on our UAV and for terrestrial use. However Ive cant really get good results from the setup despite the fact that all is working well in the field. Once I get back from the field, I get disappointed very quickly due to bad results but hopefully its just because Im still a newbie at this and the more experienced users here can help me.
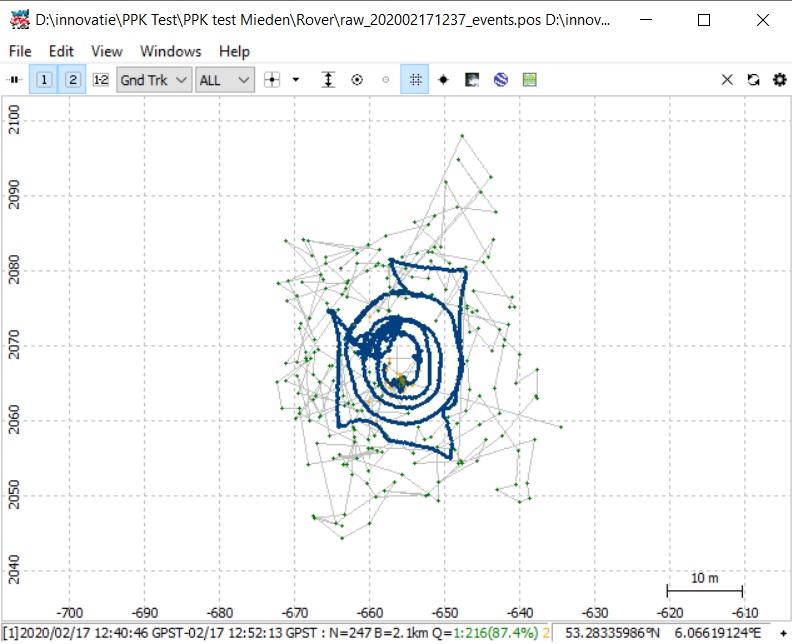
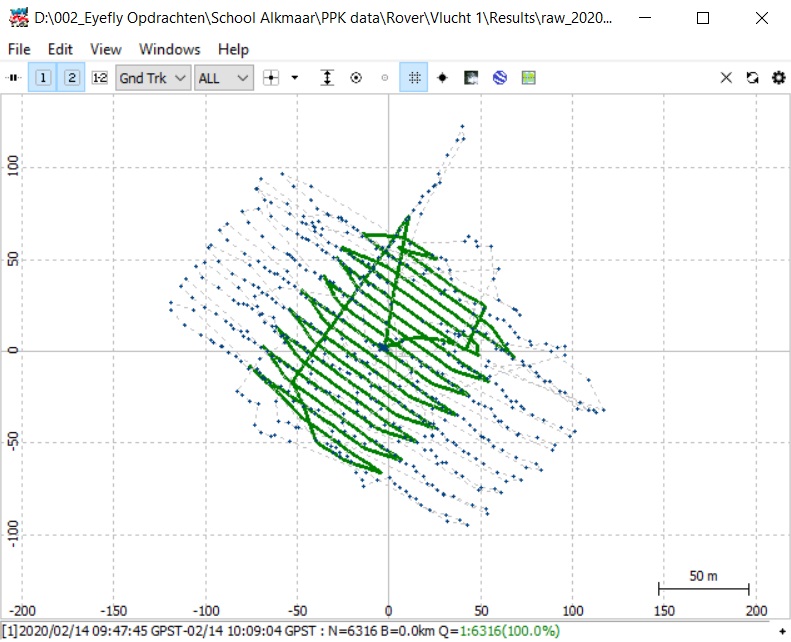
As mentioned before I tested the setup on our UAV and for terrestrial use. But when I compare the .pos file with the events.pos file I can see that my photo positions are all over the place (see attachement)
Could someone take a look at these files and see if you can get better results? I`ve added all the files to a wetransfer download link: https://we.tl/t-LyxzTL6u7a
Not to forget, I updated both the rover and the base to the latest stable firmware. If a system report is needed then let me know.
One more thing I forgot to say is that with the terrestrial use and some of the flights I`ve got more events than photos. This also happened a lot with the M+ module.
It appears that you and I are having the exact same issue, within reasonable comparison.
Given PPK results, my photo positions are also all over the place relative to the .pos path, in much the same way as in your second image.
Additionally, I too am receiving more events than photos. Normally I blame this on excessive ground speed and thus pushing the limits of my A7R III, which responds by overrunning its buffer and failing to save captures (but still managing to send a pulse mid-exposure, what a pain).
Sorry I don’t have any actual help for you, but hopefully having two users with similar issues will garner more feedback - and perhaps a solution.
What is the capacity of your power bank? and what autonomy (hours) of work do you achieve with it using everything together, antenna, reach m2 and LoRa radio ?.
Hello, the capacity of the powerbank is 5000mah. Its just a normal powerbank for charging your smartphone. I calculated the use per hour according to the specs on the emlid website. Theoretically the powerbank could last about 10 hours in this setup. Thats more than enough for me
@polina.buriak Sorry to interject, but would full system reports from my setup provide additional assistance, given our similar issues? I can add them to my existing post for consistency.
Thank you for the update! Since u you posted this update I went immediatly outside for testing. Unfortunatly we had bad weather sunday so I had to test it in the field at a job which did not gave me a lot of room to test the system. I can say that during the second flight I got all the events I needed. No more no less… so thats good! And I also got a 100 procent fix during the whole flight!
The first flight however still showed too much events but I was able to filter the wrong ones out easily. But I still got a 100% fix. I’m going to look into it to see if this might be a hardware issue from my side. So I will keep you updated. If you like, I could send the raw ubx files from both flights
Just wanted to give you an update. We’re still working on fixing the issue with the appearance of extra time-marks. I’ll keep you posted on when the fix will be released.
We’ve released the v2.22.5 firmware version for Reach M2 that should solve some issues with the extra time-marks.
It’d be cool if you could update the units and tell us how the release works for you. Please note that fix only works for logs recorded in RINEX currently.