



Hello everyone,
I am very disappointed because I can t figure out how to manage this problem. The Navio 2 autopilot is a shield for my Raspberry Pi 3 Model B, I made all connections, it is behave just well when I power it up, i am able to connect it to Mission planner via Telemetry, I can visualize a sensor data exchange …BUT…when I move it to see if my command surfaces behave well …it freeze! I am very thankful to anyone who can give me an advice…I am here for more details! Thank You!
Hello there!
Could you please elaborate what is that you’re trying to achieve?
What is wrong exactly?
Do you run ArduPilot? Which image do you use?
I think it is a problem of the current … when servo drain more current it freeze … because I try to move the surface command with TX …and I have the same problem!
I use Emlid Raspbian Image, (md5), everything went just ok … until I try to move the autopilot…I think it is a problem of current …but I am not sure…
I run ArduPlane …
I am trying to calibrate the sensors in Mission Planner…but when I am connect to Mission Planner …if i try to move command surface …the autopilot is freezing…
Could you please send us the logs to analyze? I don’t understand what you mean when you say [quote=“vidan.cristian, post:4, topic:5024”]
move command surface …the autopilot is freezing…
[/quote]
Sorry. A video might help.
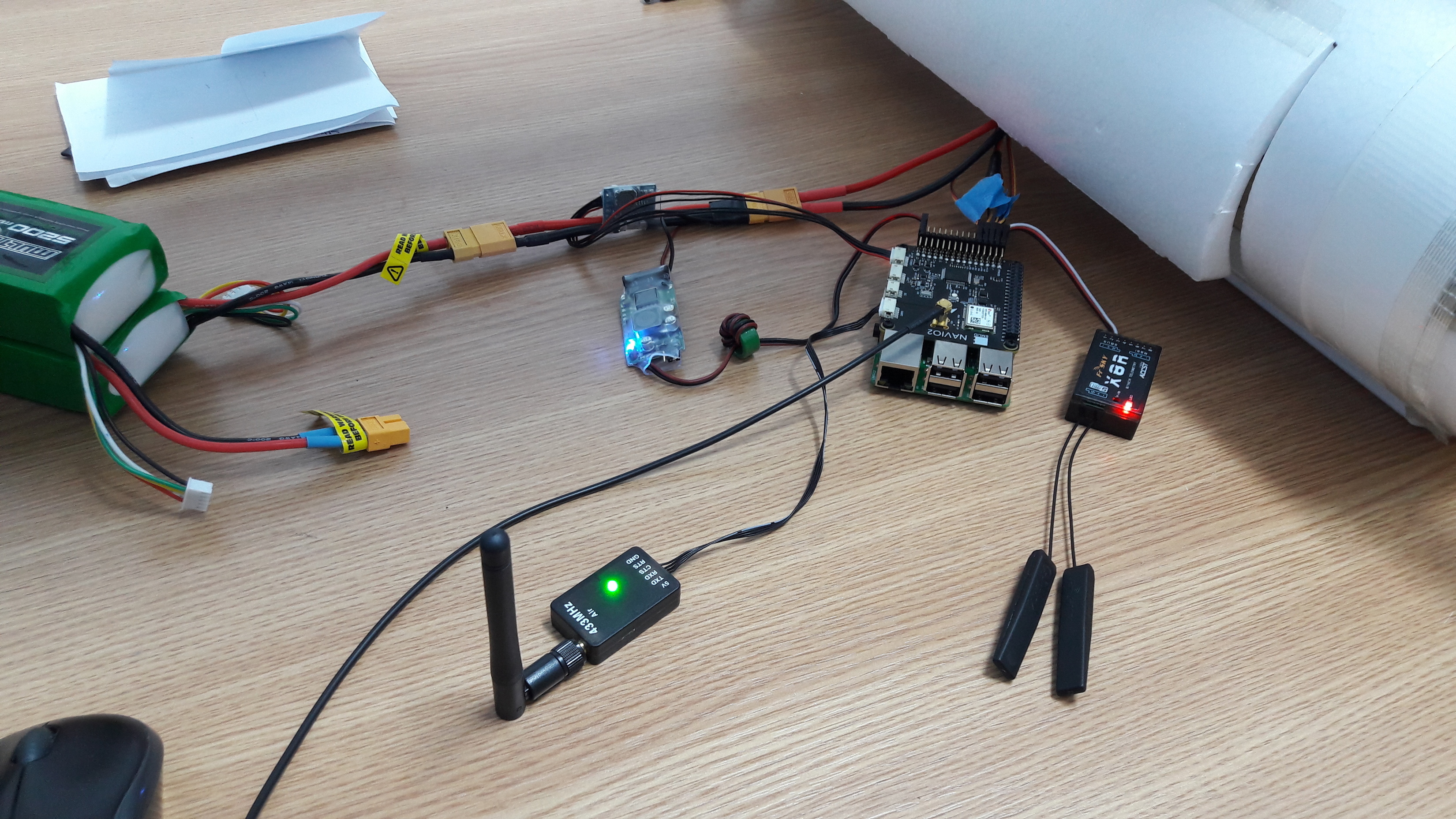

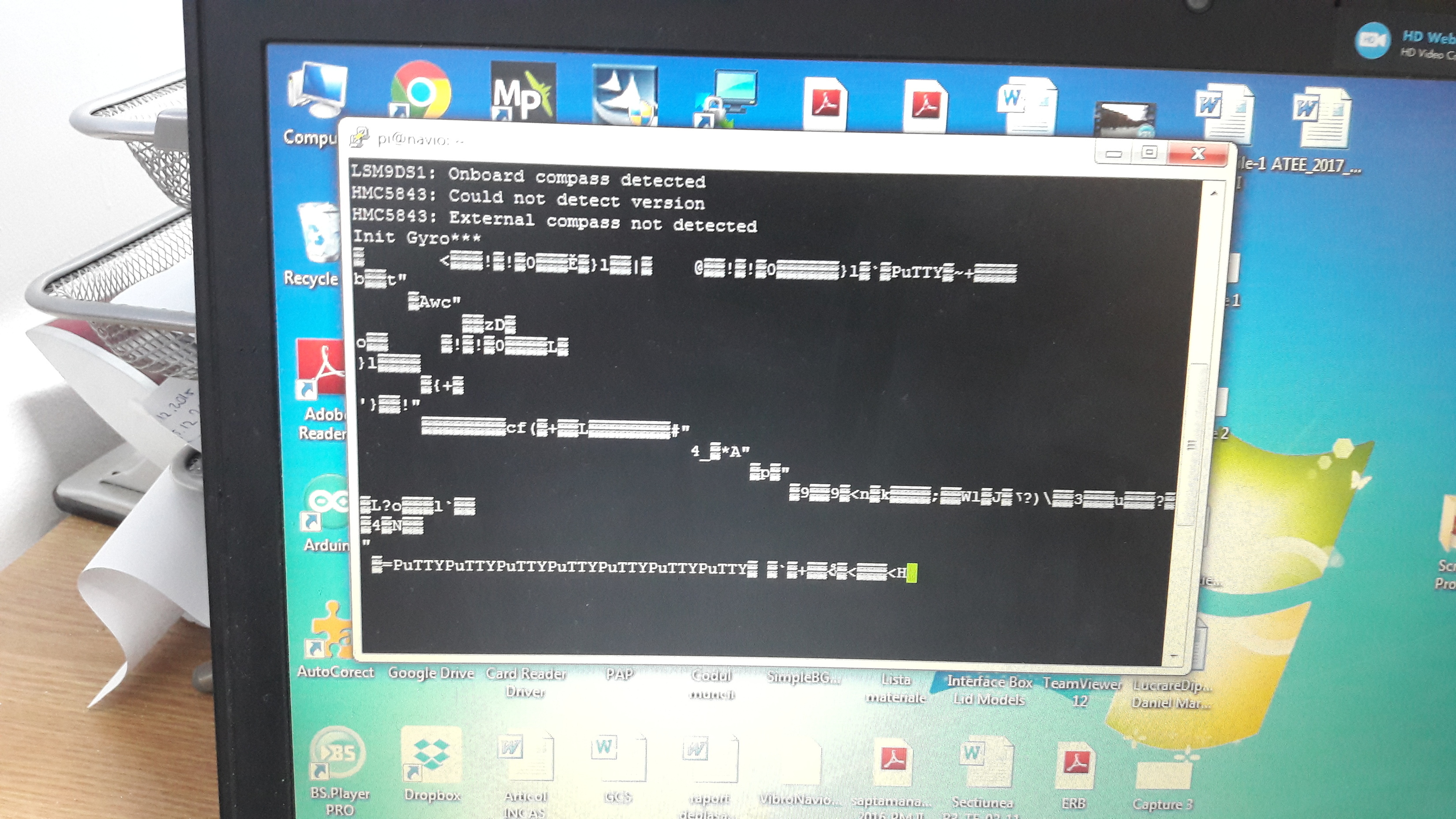
In the first picture is the connections that i have…in the second one I try to connect the Navio 2 to Mission Planner via telemetry…and the last one …shows how the Navio 2 is frozen…sometimes…it is continue to work until I try to move the command surfaces …if I move the autopilot on any axes with a small angle …it works just fine…but if i move it with a bigger angle it freeze…I can t send a video because i should convert its format …I hope that you can understand what happens…thank you!
Sorry, I don’t understand what you mean here ![]() Could you please rephrase that?
Could you please rephrase that?
I suggest trying out UDP connection and use UDP in Mission Planner as link option.
sudo ArduPlane -A udp:<ip>:<port> -C /dev/ttyAMA0
Ok …let s try again…
I give the command : sudo ArduPlane -A udp:192.168.8.xxx:14550 -C /dev/ttyAMA0
I understand that in this moment I can connect with both udp and telemetry link. ok?
BUT: when I hit enter after i wrote sudo ArduPlane -A udp:192.168.8.xxx:14550 -C /dev/ttyAMA0 I heard all the servo and SOMETIME the motor initialyzing and I have a few situations:
1.The ArduPlane is initialyzing bun after a few rows of unknown signs it is just stop;
https://community.emlid.com/uploads/default/original/2X/e/e10c7ea268dce0db2a9dad37dfe48b1084f5231b.jpg
https://community.emlid.com/uploads/default/original/2X/9/9f6d7430b86982cc4b7290e3d89b87d95c53e49e.jpg
- after stop I can t connect with any links (udp or telemetry)
- I receive a message like: Raspberry Pi 2/3 with BMC2709!..

- I can t to connect to mission Planner with any of links
- Sometimes when I succeded to connect to Mission Planner (I don t know why sometimes works and sometimes not work)…If I put my hand on the AutoPuilot (Navio2) and move it on it s axes (especially in its left side) it freeze…stop…block…I don t know how to say…
i am desperate to find what happens because I bought them to use not to put into a box and leave them…/
thank you !
Maybe I am not very explicit but trust me that I am also confused!
The last screenshot shows expected behavior: nothing is outputted to the console. It’s alright.
Is it possible that after something wend south you ssh’ed into the Raspberry and launched ArduPilot one more time even though the other instance had already been launched at the time?
I’d recommend sudo killall ArduPlane beforehand in order to eliminate the latter issue.
The latest beta is easier to configure. have a look at it, please!
What is happening to the RGB LED on the Navio during the freeze?
I use the command: sudo killall ArduPlane…but nothing…
Leds when I can t connect …or when it is blocked:
NAVIO2: - fast flashing multicolor then
- green 2 seconds then
- stop
Raspberry: - continous red light
- flashing gren …both in same time
Could you please post the output of dmesg after the freeze?
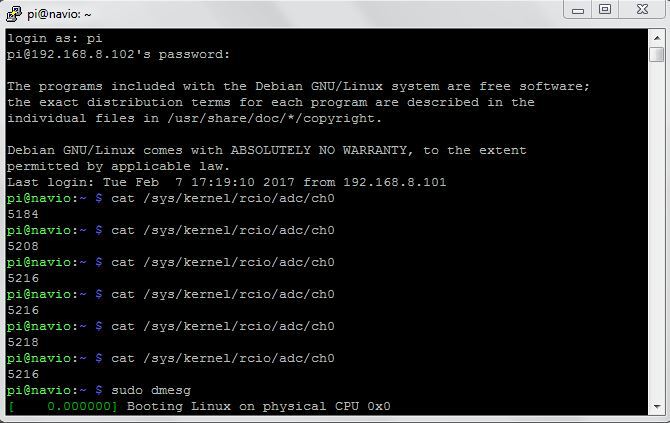
I’m also interested why do you power the board the way you do (I mean the chord that is connected to the 14th channel). Could you please verify the board voltage by running cat /sys/kernel/rcio/adc/ch0
After freezing I can t write any command…I receive the message: “Software caused connection abort”
Should I install this new image (Beta)? Do you think it will work with that one ?
I want to ask you to do a couple more experiments to understand your problem more properly.
cat /sys/kernel/rcio/adc/ch1- detach the BEC and the servos
cat /sys/kernel/rcio/adc/ch1- try to launch ArduPlane one more time
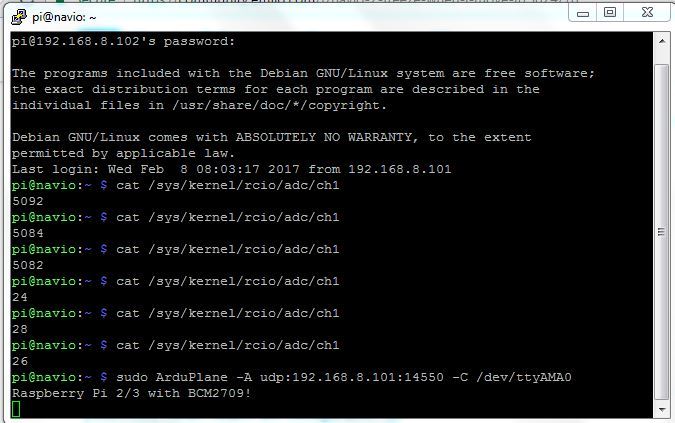
It works…After disconnect the all servos and BEC and receiver also…it works properly…I can connected both UDP and Telemetry without no problem.
As you can see in the image …first 3 commands are with servo + Bec connected and the follower three commands are withut servos …in the last one I launch ArduPlilot.
Seems like it’s a power issue. Try to attach every device in order.
Try attaching your BEC and launch ArduPlane. If everything works fine, proceed on attaching the servos.
thank you for advice…everything work ok …until I connect the elevator servo or yaw servo …
I don t think it is a problem with servo connection because i flight the aircraft manually…and it doesn t seem to have wrong cable …
what do you think?
It is hard to undestand …sometimes work with 2 servo connected …sometimes not …