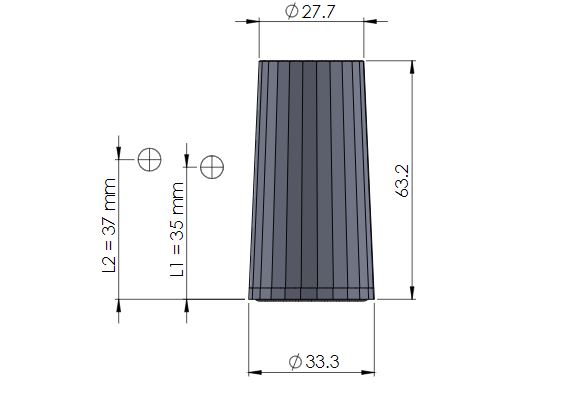
Joe I see that your antenna height on the rover is .23 m. My height from the base of the antenna to the center of the camera on my Metta PPK Kit/Phantom 4 Pro is .17 m. Then I add .035m for the phase center of the antenna for a total of .205m. Was that a typo or are you using a different antenna?
I hadn’t measured the antenna yet, I assumed it was done when you take a photo on the GCP? Using the height of the GCP (measured with a RS2), you’d take away the elevation PPK result of the photo and that would be your height?
In PPK each photo trigger is a measurement at the phase center of the GNSS antenna. You apply the offset to get the accurate photo center. In my case it is .205m. I’m still testing and need to determine the forward offset due to the angle of forward tilt of the drone. I’m surprised not to find more info on this topic as I would expect a lot of these PPK kits are out there on P4Pros.
As for the camera shot while on the target that is where you would add an additional measurement from the center of the camera to the bottom of the drone base and would subtract that value from the height obtained in the events file for that event to determine the accuracy of that measurement compared to the surveyed value.
It might be best if ES match photos not just by order but also by times. This might solve problem of number of photos not equal to number of PPK points.
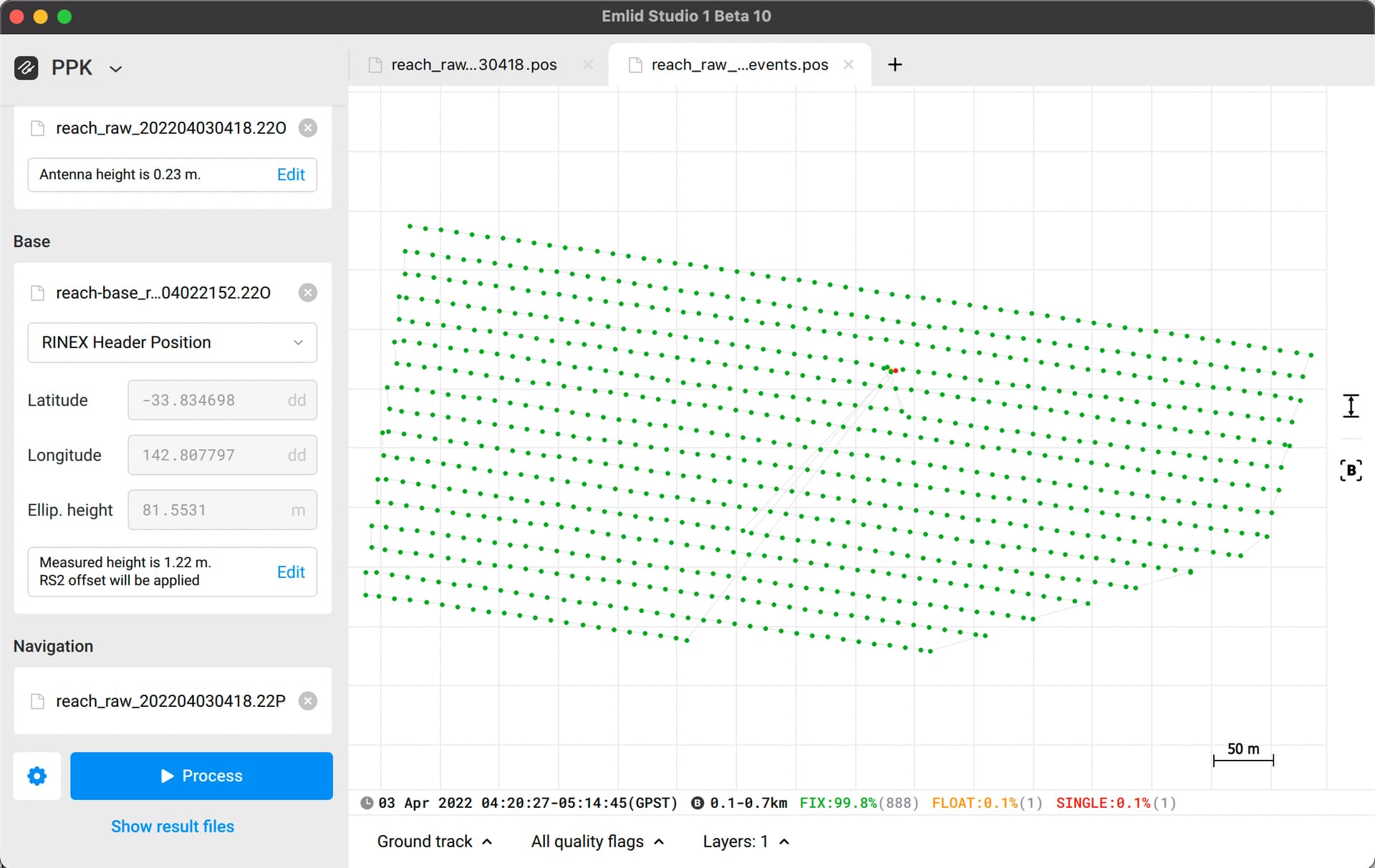
If you put in measured antenna height when you set raw data recording, you don’t need to add it in Emlid Studio. This value is already in the RINEX header.
I didnt get a reply on why it wouldn’t accept the number of photos?
@wizprod PM’d me and told me that I had alot of noise - something I had with the Tuffwing kit as well. I will be starting a new thread on noise.
When this is all done, I’m going write a detailled document on all these issues and the correct way to set this up, troubleshooting etc… There doesn’t appear to be much documentation.
I’ve checked your logs and post-processed them in Emlid Studio. I got 890 events: 888 in Fix, 1 in Float, and 1 in Single. The same as your result, I suppose.
I’ve also found 889 time marks in your log and 1 invalid time mark. So, their total quantity equals 890. It’s the same as the event’s quantity from Emlid Studio.
Invalid time marks are a very rare issue. Usually, they are caused by hardware setup. In your case, it may happen because of the connection between the drone’s camera and Reach. We can hardly comment on that setup because it’s a non-standard way of integration.
I sure this is a silly question but the Mettatech website doesn’t mention the V2 only the V1. Is it now compatible with the Pro V2? I’m looking at purchasing the kit as well. Thanks
It’s compatible with any Phantom 4 (standard, advanced, Pro, Pro V2.0). Ideally you’ll be using it with at a P4 Advanced, Pro or Pro V2.0 that have the 1-inch sensor camera
It looks like a mismatch between the number of photos and time marks’ quantity in Emlid Studio. We consider such cases and help each user individually cause hardware setups may be quite different.
I really appreciate your posts. I had doubts between getting Tuffing or Metta’s one. Now I know I can trust more in Metta’s Kit. I’ve read recently that they’re also selling a GNSS Base based on M2 and a big anthenna. I’ll try working with both products.
Dear Luis, I had Tuffwing initially and then I bought the PPK kit from Metta because it works with the Tallysman antenna which allowed me to have a better solution compared to the Tuffwing antenna. About Metta’s Gnss antenna with M2 module, I already bought it and I’m waiting for it to arrive so I can test it.
For Metta or Tuffwing phantom 4 Pro PPK KIT users, you can correct the delay (0.3) of the photosensor with “UAV - PPK” and further improve the accuracy of the cameras. I recommend it if you want to work without photogrammetric Support Points.






")
")