



I would like some feedback from mettatec ppk users for P4P.
Is it reliable? Is the post proccessing possible with Emlid Studio in order to re tag the photos?
I currently have P4Adv, Emlid M2 with helical antenna.
For base station I have access to CORS and also my own base station.
Ideally I would like to use a VRS base station generated by my country’s CORS but they offer 5 sec rinex files.
If I use 5 sec rinex file instead of 1 sec is it problem with the interpolation?
For photogrammetric processing I use Metashape.
Hello, I have been using the METTATEC PPK KIT FOR PHANTOM 4 and Reach M2 for 6 months with very good results. We use Leica, Trimble, South Geomax equipment as GNSS Base, always recording every 1 Hz, which is recommended for optimal interpolation. The GNSS processing is done in Emlid Studio and additionally we use a UAV - PPK APP to correct the 0.3 delay of the KIT photosensor. For processing in Metashape, we additionally enter the photos, the PPK geotagging .csv file.
")
")
3 Likes
Let’s say I have “cm” level geotags for all my photos but the base station is average single.
I also have 3 GCP’s with cm level based on a near CORS.
How can I shift the whole project to fit 1 gcp and let the others for check in Metashape?
Generally how you manage a ppk project with gcp’s?
Can anyone comment?
Our last step is to calibrate the drone data in CAD. We don’t use GCP’s on PPK or RTK. We process just the images and the Z is an average of checkpoints error.
Thanks,
I will do my tests as soon as I get the ppk kit.
Hi all,
I got the mettatec ppk kit for my Phantom. The installation is very simple and straightforward.
I did my first test flight and the workflow went good.
I had my base station recording raw data in 1Hz and the M2 was recording at 10Hz (GPS,GLO,GAL).
However it was a very windy day and the drone was not very stable. Also the drone tilts while it moves forward and so the M2 antenna. I suppose that the corrected position of the camera is not in the camera center so I think that the positions are off by random error.
Can this error be calculated?
The end result was good in elevation but it had about 8cm horizontal error.




There’s currently not a way to input anything other than the antenna height in Studio. Otherwise you would have to do it in RTKLIB or other software. As a side not the second point is not a good spot for a GCP. You want flat terrain with at least 0.5m clear around it. I don’t know what you consider good elevations but that point could easily introduce an extra cm or two of warping. How are you determining 8cm of horizontal error? From a report?
3 Likes
To be honest, it was a quick n’ dirty ppk test.
It was very windy and had to take manual photos.
The 8cm difference was determined by metashape. Also the gcp’s was not optimal and the error was not uniform.
I will come back with a better test.
2 Likes
Wind is definitely an enemy in the field. Despite what drone manufacturers say the wind ratings are we never survey-grade map with any more than 15-20mph on the ground. Gusts are a whole different beast but I see RMSE values of camera locations jump from 1-2cm to 3-5cm every time. I flew in a 15mph wind yesterday and it was constant so the drone was pitched about 30 degrees fighting through it. As known it is always better to fly parallel with the wind or you introduce inconsistent roll to the scenario.
3 Likes
Or just fly constant heading ![]()
4 Likes
Instructions unclear. My fixed wing just flew away in the sunset never to be seen again.
3 Likes
Never stop!
2 Likes
I agree with @chascoadmin
I just like to add why its better(in this case) to fly parallel with the wind vs across (for the sake of the readers, hi btw).
If you fly across, the antenna located above the camera will shift more between back and forth (or left to right, if you like. Depending if you fly the drone forward or sideways) then it would if you flew it along and against the wind… thus the accuracy between the time of capture and position of the antenna above the camera and the associate time in the photo.
My 2`cent worth of something
2 Likes
![]()
![]()
While we `re at it, I have a drone that literally gives a flying bug what the wind does ![]() …
…
https://twitter.com/ToreCrash/status/1252266119433519109?s=20&t=fhue1fgRcCd61OH4JNkrng
Produly made by parts from Emlid of course
3 Likes
Fixed wing… got ya… Fixed Heading might be challenging ![]()
4 Likes
Fixed wing to ATC. I might be out for second…
ATC to Fixed wing Why?
Fixed wing to ATC. Heading around equator to continue my task on the other side…
*ATC * FACEPALM ![]()
1 Like
Hi,
regarding the use of base station at 1Hz I did a comparison between 1Hz and 5sec raw data and the differences on the fixed points were very small (about 1-2cm).
The 1Hz base station was my own local base station tied to local private CORS.
The 5sec base station was a generated VRS station downloaded from my country’s national CORS.
The private CORS is bound to national CORS so the 1-2cm difference might be from the discrepancy between the 2 CORS.
Overall I am happy that I can use the VRS base station instead of using my own base station!
1 Like
So I did another test in good conditions.
I did a single grid mission and also took some manual photos (POI) of two small buildings.
The drone speed was about 4m/s for the grid mission and the manual photos was taken with stop’ n’ go method.
Then used Emlid studio and all came good.
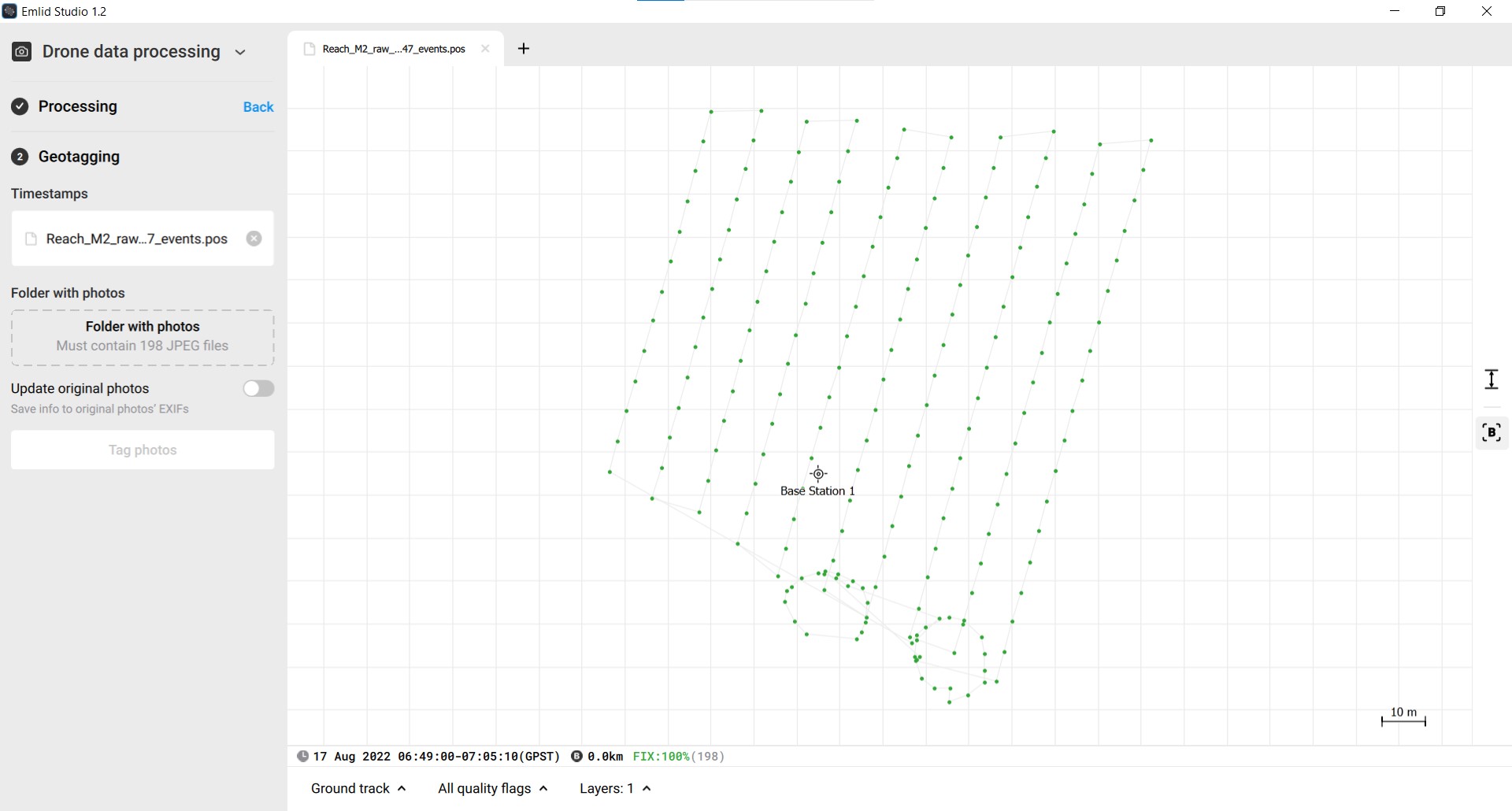
What I don’t understand is about metashape, why the photo errors after initial alignment are so large for the single grid mission?
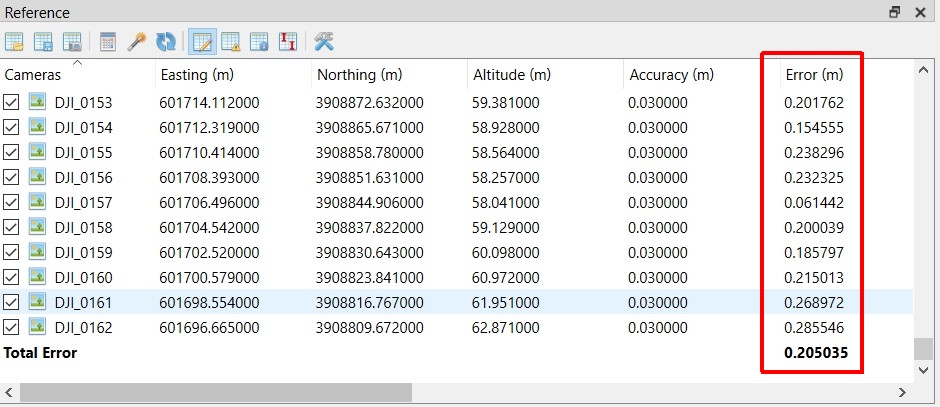
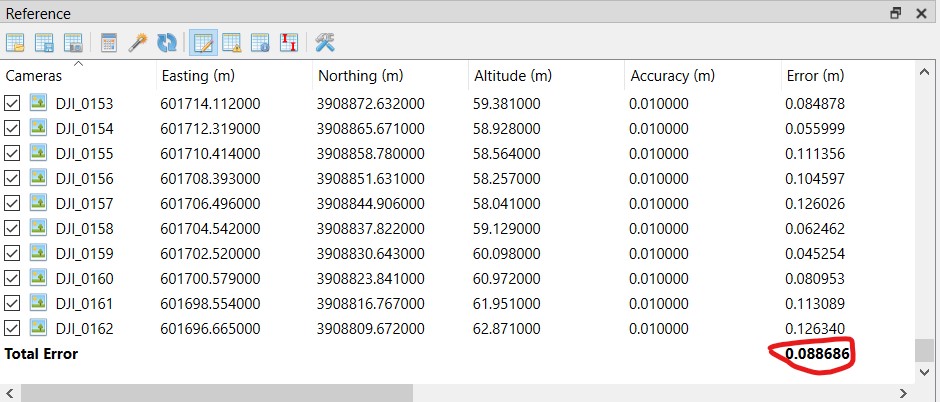
If I set the photos accuracy to 1cm I get better results after optimize but not what I expected.
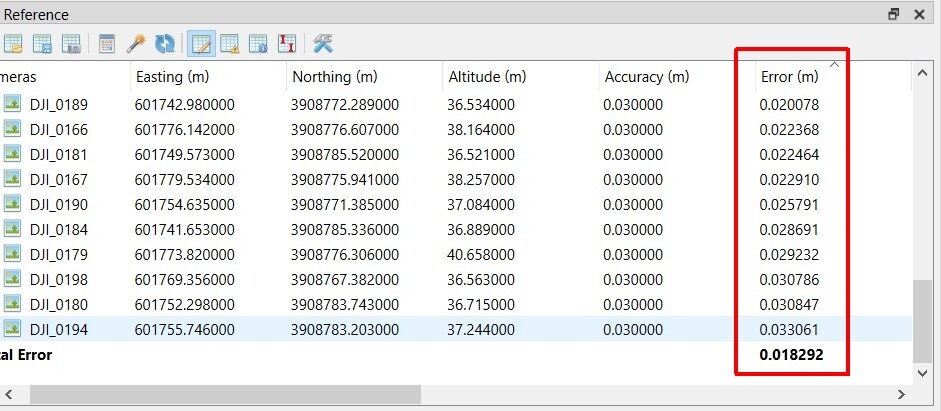
The manual photos had the expected errors of about 2-3cm.
Am I doing something wrong or the ppk kit works good only with the stop ‘n’ go method?
Do you have all of your offsets correct and are accounting for the 30ms lag in the shutter capture?