No/Yes, I’m using the command line version which I call from a custom script for every single survey point.
So the script reads the survey points from the csv file (exported from Reach) and then calculates a static solution for each point. That saves a lot of work (that is why I would like to merge the RINEX files) and the result is very nice as I tested some days ago where I revisted points which I did put there two weeks earlier (some illustrating pictures below).
Do you have UBX files? You can try converting several UBX logs to one RINEX log in RTKConv, just link to all of them in the field for input data. For it, you should specify the path in such a way: C:\...\rover\raw*.UBX.
You also can choose several files in RTKPost base and rover fields, it allows processing all RINEX logs at a time.
its my own Python script, you can’t find it. Its still work in progress.
You can find parts of it here:
and you can find a similar tool which uses another approach here:
If you are interested to use my script I would expect you to donate to the Against Malaria Foundation to share the benefit you get from it. I don’t know if you are willing to do so and still interested under that conditions, especially since it will be always a work in progress.
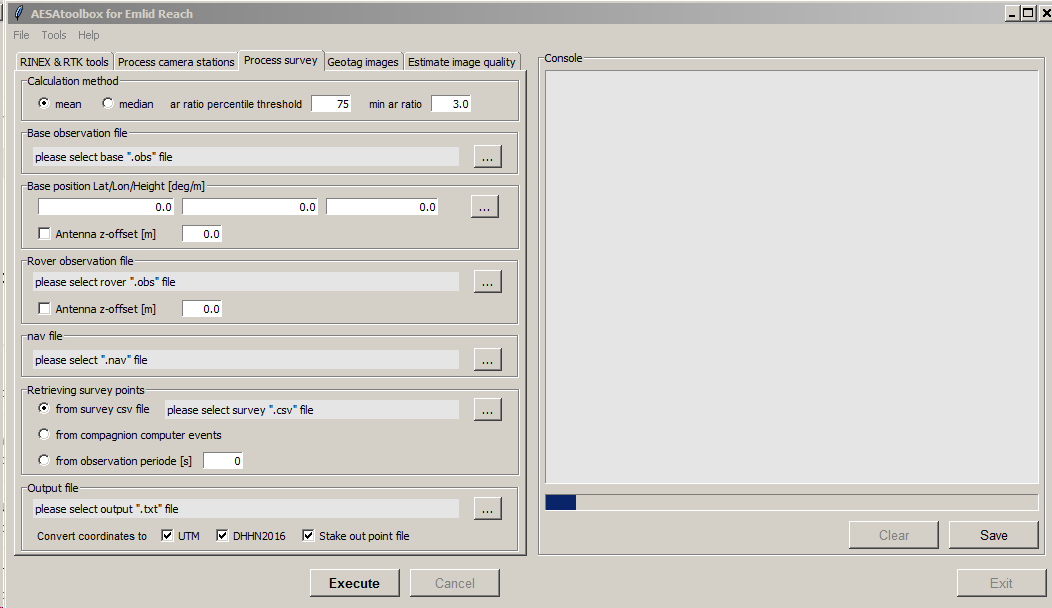
One more question. This script is only capable to do time offsets right? I Saw a screenshot of it showing other capabilities lime geotag photos and so on… Os there any chance to buy it ir something lime that?! Thanx
What are the functionalities you need to have? I’m working on
Geotagging/Metashape input file with image names
Leverarm correction
UTM/orthometric height conversion
Survey points calculation
File download
…
I’m doing that with slow speed because I do it in my spare time and I’m willing to share if you honor the work by donating to the Against Malaria Foundation. Why? Because I try to focus my impulses to help others on people who really need it.
Hi again.
basically needed the tool to apply the time offsets, leverarm correction and geotag of the photos. how can you calculate the delay between the flashing of the light on the phantom 4 pro and the actual moment of each photo? Does the blinking of the light happen before or after the moment of the picture? Thank you.
Hi @pvargues,
I do not work with a Phantom but with custom build uavs. @wsurvey has extensive experience with the topic, maybe he can share his experience or probably you can find this information online? I also guess that the exact figure is connected to the kind of foto resistor etc. you are using.
I’m only at the beginning with the lever arm correction, so I can correct relative to the gps flight path but I have not integrated any vehicle tild etc. yet. What kind of leverarm correction do you need?
Do you need to have a file with image names and coordinates or do you need to have the coordinates written to the exif data of the images?
here’s an easy project. hook up the emlid reach m+ and whatever detector you use, to the phantom. point it at a screen that is supposed to be showing a synchronised UTC time and take many pictures of it. compare each displayed time in photo to time recorded by reach m+ for each photo, and calculate average offset. This should get you a reasonable starting value.
Thanks for the explanation. I wonder how to realize that and which resolution can be achieved on a screen, 50 ms? How did you do that, how did you get the UTC displayed?
there are several apps that will display a time synchronised via NTP for download on app store.
in order to get some idea of resolution i videoed the screen at 120fps and figured out how often it refreshed. so then i could get an idea of the time offset and potential error. i suppose the part i couldn’t know is did the display frame get compiled and sent so time was correct in the middle of static display, or whether correct time was gathered, sent to screen and aged immediately. Anyhow, i think the delay i came up with when i did it was within 50ms or so of the time i’ve determined more recently with a different method.
if the boss buys me a P4 RTK i will still hook it up to the reach m+ and then i’ll know for sure, assuming the P4 RTK uses the same LED driving setup.